1.本发明涉及水下仿生机器人领域,具体是一种扑翼式仿生转向控制装置。
背景技术:
2.水下机器人的高机动性是满足海洋环境研究、海底资源勘探和海防战略需求的重要指标。转向机构是实现水下机器人高机动性的关键机构。目前水下机器人主要采用螺旋桨推进器结合舵面的偏转或者矢量推进方式来产生机动控制力。在低速运行时,螺旋桨处于非全程旋转的工作状态,其效率将显著降低,并且会产生难以预测的流体脉冲,控制精度较低。而矢量推进方式的成本高昂、技术复杂、对本体结构和控制系统要求较高。加之水下地形、环境复杂,存在暗流、浪、涌等多种不确定因素、非线性耦合、噪声干扰等扰动因素,造成转向控制的难度大。
技术实现要素:
3.本发明是为了解决上述现有技术存在的不足之处,提出一种设计简单、控制方便、低成低的扑翼式仿生转向控制装置,以期能提高水下机器人在低速巡航和转向的效率和灵活性,从而为丰富水下机器人的转向技术以及提高水下机器人低速航行时的机动性奠定基础。
4.为达到上述发明目的,本发明采用如下技术方案:
5.本发明一种扑翼式仿生转向控制装置的特点在于,用于控制水下机器人,并包括:主控模块、通信模块、左扑翼驱动模块、右扑翼驱动模块和电源模块;
6.其中,所述左扑翼驱动模块包含:左扑翼电机驱动器、左扑翼电机、左扑翼编码器信号转换器、左扑翼编码器;所述右扑翼驱动模块包含:右扑翼电机驱动器、右扑翼电机、右扑翼编码器信号转换器、右扑翼编码器;所述通讯模块包括:rs485rtu通讯模块;
7.所述主控模块的输出端分别连接所述左扑翼驱动模块的左扑翼电机驱动器、右扑翼驱动模块的右扑翼电机驱动器、所述通信模块的输入端;
8.所述主控模块的输入端分别连接所述左扑翼驱动模块的左扑翼编码器信号转换器、所述右扑翼驱动模块的右扑翼编码器信号转换器、所述通信模块的输出端、所述电源模块的输出端;
9.所述电源模块的输出端还分别连接所述左扑翼驱动模块的输入端、所述右扑翼驱动模块的输入端、所述通信模块的输出端;所述通讯模块的输入端还连接上位机;
10.所述主控模块通过所述rs485rtu通讯模块实时接收所述上位机发送的偏航控制命令和偏航参数以及减速控制命令和速度参数(v
t
,vi),并分别用于转弯模式下和减速模式下的实时控制;其中,表示水下机器人所设定的偏航角和表示水下机器人实时反馈的当前偏航角,且所述偏航角为水下机器人前进方向与地面垂直投影在世界坐标系下的偏离角度;为负代表向左转弯,为正代表向右转弯;v
t
表示水下机器人所设定的速度和vi表示水下机器人的实时速度。
11.本发明所述扑翼式仿生转向控制装置的特点也在于,收到所述减速控制命令时,执行减速模式实时控制为:
12.若所述设定的速度v
t
≥实时速度vi时,则判断为无需减速,左扑翼电机和右扑翼电机处于原始位置且无动作;
13.若所述设定的速度v
t
<实时速度vi时,则判断为需要减速,所述主控模块计算水下机器人的双侧扑翼展开的角度θv,同时控制所述左扑翼驱动模块和右扑翼驱动模块分别将两侧扑翼匀速展开至角度θv的位置;同时,所述左扑翼内置编码器与右扑翼内置编码器分别采集左扑翼驱动电机和右扑翼驱动电机的位置信号并相应经过左扑翼编码器信号转换器和右扑翼编码器信号转换器的转换放大处理后反馈至所述主控模块,使得所述主控模块根据反馈的位置信号对左扑翼驱动电机和右扑翼驱动电机进行闭环运动控制,以达到角度θv的位置;从而在双侧扑翼受力均匀的作用下,所述水下机器人减速至所设定的速度v
t
,并将减速完成信号反馈至上位机。
14.收到所述偏航控制命令时,执行转弯模式实时控制为:
15.若所设定的偏航角时,则判定为无需转向动作;
16.若所设定的偏航角时,则判定为向右转;所述主控模块根据计算出水下机器人的右侧扑翼展开的角度同时利用所述右扑翼驱动模块控制所述右侧扑翼驱动器驱动所述右扑翼电机使扑翼展开至角度的位置,而左侧扑翼则不运动并处于初始位置;同时,所述右扑翼编码器采集标定右侧扑翼驱动电机的位置信号并经过右扑翼编码器信号转换器转换放大后输出至所述主控模块,使得所述主控模块根据反馈的位置信号对右侧扑翼驱动电机进行闭环运动控制,以达到角度的位置;从而在右侧扑翼受力大于左侧扑翼受力的作用下,所述水下机器人的航向向右偏转至并将转弯完成信号反馈至所述上位机;
17.若所设定的偏航角时,则判定为向左转;所述主控模块计算出水下机器人的左侧扑翼展开的角度同时利用所述左扑翼驱动模块控制所述右侧扑翼驱动器驱动所述左扑翼电机使扑翼展开至角度的位置,而右侧扑翼则不运动并处于初始位置;同时,所述左扑翼编码器采集标定左侧扑翼驱动电机的位置信号并经过左扑翼编码器信号转换器转换放大后输出至所述主控模块,使得所述主控模块根据反馈的位置信号对左侧扑翼驱动电机进行闭环运动控制,以达到角度的位置;从而在左侧扑翼受力大于右侧扑翼受力的作用下,所述水下机器人的航向向左偏转至并将转弯完成信号反馈至上位机。
18.所述主控模块是利用式(1)计算出双侧扑翼展开的角度θv:
[0019][0020]
式(1)中:δv为根据速度控制参数(v
t
,vi)在比例-积分控制器下计算出实时速度vi与设定的速度v
t
的比例系数;v
max
、v
min
分别为水下机器人的最大和最小运行速度;θ
max
为扑翼展开的最大角度。
[0021]
所述主控模块(1)是利用式(2)计算出双侧扑翼展开的角度
[0022][0023]
式(2)中,δv为根据偏航控制参数在比例-积分控制器下计算出当前偏航角与设定的偏航角的比例系数;分别为水下机器人的最大和最小偏航角度;θ
max
为扑翼展开的最大角度。
[0024]
与现有技术相比,本发明的有益效果在于:
[0025]
1、本发明是以帝企鹅的扑翼特征为研究机理,为水下机器人增加扑翼式仿生转向控制装置,改进了传统舵机螺旋桨式和矢量推进方式上的能效低、精度低、结构复杂、控制难度大等缺点。
[0026]
2、本发明采用左扑翼驱动模块、右扑翼驱动模块分别驱动左扑翼和右扑翼。主控模块独立控制两侧扑翼运动,利用两侧扑翼的张开和收缩,既能实现水下机器人的减速运动,又可通过两侧张开角度不同实现水下机器人的左转弯运动和右转弯运动,使水下机器人运能性能更加灵活。
[0027]
3、本发明主控模块cpu内建立pid控制器,减速模式的速度控制比例系数和转弯模式下偏航控制比例系数均可通过pid控制器获得,算法较为简单实用。主控模块的编程简单,易于实现,可推广至水下机器人应用领域。
附图说明
[0028]
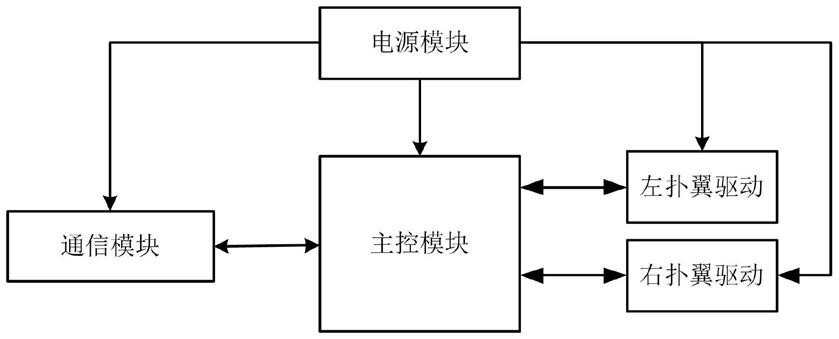
图1为本发明扑翼式仿生转向控制装置的结构框图;
[0029]
图2为本发明扑翼式仿生转向控制装置的原理方框图;
[0030]
图3为本发明扑翼式仿生转向总体机构示意图;
[0031]
图中标号:1.右扑翼电机;2.安装机架;3.左扑翼电机;4.左扑翼;5.右扑翼;
具体实施方式
[0032]
下面结合具体实施方式对本专利的技术方案作进一步详细说明。
[0033]
请参阅图1-图3,一种扑翼式仿生转向控制装置,包括主控模块、通信模块、左扑翼驱动模块、右扑翼驱动模块和电源模块;其中,左扑翼驱动模块包含:左扑翼电机驱动器、左扑翼电机3、左扑翼编码器信号转换器、左扑翼编码器;右扑翼驱动模块包含:右扑翼电机驱动器、右扑翼电机1、右扑翼编码器信号转换器、右扑翼编码器;通讯模块包括:rs485rtu通讯模块;
[0034]
如图2所示,主控模块的输出端分别连接左扑翼驱动模块的左扑翼电机驱动器、右扑翼驱动模块的右扑翼电机驱动器、通信模块的输入端;
[0035]
主控模块的输入端分别连接左扑翼驱动模块的左扑翼编码器信号转换器、右扑翼驱动模块的右扑翼编码器信号转换器、通信模块的输出端、电源模块的输出端;
[0036]
其中,电源模块包含电源管理模块、电池、外部供电接口,电源管理模块内置供电切换电路和电源管理ic系统,管理电池和外部供电工作状态。当检测到外部供电接口有电压时,优先选择外部电源为系统供电。当检测到电池电压过低时且外部供电接口有电压时
候,电源管理模块通过外部供电接口为电池充电。电源管理模块内置有控制芯片,能够检测外部供电接口和电池的电压数值。
[0037]
电源模块的输出端还分别连接左扑翼驱动模块的输入端、右扑翼驱动模块的输入端、通信模块的输出端;通讯模块的输入端还连接上位机;
[0038]
主控模块通过rs485rtu通讯模块实时接收上位机发送的偏航控制命令和偏航参数以及减速控制命令和速度参数(v
t
,vi),并分别用于转弯模式下和减速模式下的实时控制;其中,表示水下机器人所设定的偏航角和表示水下机器人实时反馈的当前偏航角,且偏航角为水下机器人前进方向与地面垂直投影在世界坐标系下的偏离角度;为负代表向左转弯,为正代表向右转弯;v
t
表示水下机器人所设定的速度和vi表示水下机器人的实时速度;
[0039]
具体实施中,减速模式时扑翼展开角度θv的计算方法为:
[0040]
减速模式下,扑翼的展开角度与减速幅度(设定值与实际值差值)有比例关系,即减速幅度越大则扑翼展开角度越大,而减速幅度越小则扑翼展开角度越小。由于控制模型复杂且无法建立精确数学模型,优先采用pid算法对减速幅度比例关系进行求解。
[0041]
在主控制器内建立减速模式pid控制器1,依据设定速度值和反馈值速度值进行求解,如式(1)所示:
[0042][0043]
式(1)中,δv为根据速度控制参数(v
t
,vi)在比例-积分控制器下计算出实时速度vi与设定的速度v
t
的比例系数;k
p
为比例常数;ki为积分常熟;kd为微分常数;e(k)为设定速度值与反馈速度值之差。
[0044]
进一步求解双侧扑翼展开的角度θv:
[0045][0046]
式(2)中:δv为根据速度控制参数(v
t
,vi)在比例-积分控制器下计算出实时速度vi与设定的速度v
t
的比例系数;v
max
、v
min
分别为水下机器人的最大和最小运行速度;θ
max
为扑翼展开的最大角度。
[0047]
转弯模式时扑翼展开角度的计算方法:
[0048]
转弯模式下,使用单侧扑翼展开方式来对水下机器人进行转弯控制。单侧扑翼的展开角度与偏航幅度(设定值与实际值差值)有比例关系,即偏航幅度越大则扑翼展开角度越大,而偏航幅度越小则扑翼展开角度越小。由于控制模型复杂且无法建立精确数学模型,优先采用pid算法对偏航幅度比例关系进行求解。
[0049]
在主控制器内建立转弯模式pid控制器2,依据设定偏航角度和反馈偏航角度值进行求解,公式如下:
[0050][0051]
式(3)中:为根据偏航控制参数在比例-积分控制器下计算出当前偏航角与设定的偏航角的比例系数;k
p
为比例常数;ki为积分常熟;kd为微分常数;e(k)为设
定偏航角与反馈偏航角值之差。
[0052]
进一步求解单侧扑翼展开的角度
[0053][0054]
式(4)中,为根据偏航控制参数在比例-积分控制器下计算出当前偏航角与设定的偏航角的比例系数;分别为水下机器人的最大和最小偏航角度;θ
max
为扑翼展开的最大角度。
[0055]
本实施例中,一种扑翼仿生转向装置的控制方法,具体步骤如下:
[0056]
步骤1、主控模块通过rs485rtu通讯模块实时接收上位机发送的偏航控制命令和偏航参数以及减速控制命令和速度参数(v
t
,vi),并分别用于转弯模式下和减速模式下的实时控制;
[0057]
步骤2、主控模块的模式判断处理程序依据上位机的控制命令进行控制模式判断并决策:
[0058]
步骤2.1当收到减速控制命令时候执行减速模式,具体操作如下:
[0059]
若设定的速度v
t
≥实时速度vi时,则判断为无需减速,如图3所示,左扑翼电机3和右扑翼电机1处于原始位置且无动作,左扑翼4和右扑翼5为贴近主体位置,此时水下机器人的扑翼产生的阻力最小;
[0060]
若设定的速度v
t
<实时速度vi时,则判断为需要减速,主控模块计算水下机器人的双侧扑翼展开的角度θv,同时控制左扑翼驱动模块和右扑翼驱动模块分别驱动左扑翼电机3和右扑翼电机1将左、右侧扑翼匀速展开至角度θv的位置;同时,左扑翼内置编码器与右扑翼内置编码器分别采集左扑翼驱动电机和右扑翼驱动电机的位置信号并相应经过左扑翼编码器信号转换器和右扑翼编码器信号转换器的转换放大处理后反馈至主控模块,使得主控模块根据反馈的位置信号对左扑翼驱动电机3和右扑翼驱动电机1进行闭环运动控制,以达到角度θv的位置;从而在双侧扑翼受力均匀的作用下,水下机器人减速至所设定的速度v
t
,并将减速完成信号反馈至上位机。
[0061]
步骤2.2当收到偏航控制命令时候执行转弯模式,具体操作如下:
[0062]
若所设定的偏航角时,则判定为无需转向动作;
[0063]
若所设定的偏航角时,则判定为向右转;主控模块根据计算出水下机器人的右侧扑翼展开的角度同时利用右扑翼驱动模块控制右侧扑翼驱动器驱动右扑翼电机1使扑翼展开至角度的位置,而左侧扑翼则不运动并处于初始位置;同时,右扑翼编码器采集标定右侧扑翼驱动电机1的位置信号并经过右扑翼编码器信号转换器转换放大后输出至主控模块,使得主控模块根据反馈的位置信号对右侧扑翼驱动电机1进行闭环运动控制,以达到角度的位置;从而在右侧扑翼受力大于左侧扑翼受力的作用下,水下机器人的航向向右偏转至并将转弯完成信号反馈至上位机;
[0064]
若所设定的偏航角时,则判定为向左转;主控模块计算出水下机器人的左侧扑翼展开的角度同时利用左扑翼驱动模块控制右侧扑翼驱动器驱动左
扑翼电机3使扑翼展开至角度的位置,而右侧扑翼则不运动并处于初始位置;同时,左扑翼编码器采集标定左侧扑翼驱动电机3的位置信号并经过左扑翼编码器信号转换器转换放大后输出至主控模块,使得主控模块根据反馈的位置信号对左侧扑翼驱动电机3进行闭环运动控制,以达到角度的位置;从而在左侧扑翼受力大于右侧扑翼受力的作用下,水下机器人的航向向左偏转至并将转弯完成信号反馈至上位机。