1.本实用新型涉及气垫船技术领域,尤其涉及一种基于遥控功能的水面清洁气垫船。
背景技术:
2.随着我国经济的快速发展,人民物质生活水平的大幅度提高,公众的日常生活产生了大量的废弃物,过去未被重视的水面垃圾污染也越来越严重。水面垃圾在水中的腐烂过程中会产生有毒有害的物质和气体,不但会污染水体,而且还会对生态平衡造成严重的影响。水面垃圾较多时会对通航及水电站运行造成影响,严重时可能酿成事故。
3.目前针对水面漂浮垃圾打捞一般是通过人工打捞,人工打捞存在以下问题:(1)人工打捞水面漂浮垃圾劳动强度大,效率低下;(2)打捞上来的垃圾普遍是装在小船上的泡沫箱内,会使穿上的打捞空间变小,容易导致清洁人员落入水中,严重的会产生事故;(3)大型清洁船无法对中小型湖泊进行清理作业。
技术实现要素:
4.本实用新型的目的在于克服上述技术不足,提出一种基于遥控功能的水面清洁气垫船,解决现有技术中的水面漂浮垃圾一般都是通过人工打捞,劳动强度大,打捞效率低,且打捞上来的垃圾一般暂时存储在小船上的泡沫箱内,会占用穿上的打捞空间,导致打捞人员落水的技术问题。
5.为达到上述技术目的,本实用新型的技术方案提供一种基于遥控功能的水面清洁气垫船,包括遥控船体和固定安装在所述遥控船体上的垃圾收集储存机构,其中,所述遥控船体受外部遥控器遥控工作,所述遥控船体为前、后两端开口的箱体结构,所述垃圾收集储存机构包括;
6.垃圾收纳箱,活动安装在所述遥控船体内部;
7.两根滚动轴,分别转动安装在所述遥控船体前端开口处的顶部和底部,且两根所述滚动轴位于两个竖直平面上;
8.传送带,其首、尾两端分别套设在两个所述滚动轴的外表面,使得所述传送带倾斜设置在所述遥控船体的前端开口处,且所述传送带的底部高度不高于所述遥控船体的底部高度;
9.驱动件,固定安装在所述遥控船体的侧壁,其输出端与所述滚动轴固定连接。
10.进一步的,所述基于遥控功能的水面清洁气垫船还包括电性连接的控制模块和通信模块,所述控制模块与所述驱动件电性连接,所述通信模块与所述遥控器电性连接。
11.进一步的,所述遥控船体前端开口处的两侧壁均固定连接有支架,两个所述支架向前延伸至所述遥控船体的前端外部,位于底部的所述滚动轴转动安装在两个所述支架之间。
12.进一步的,所述滚动轴的两端均固定安装有带轮,所述传送带套在所述带轮上。
13.进一步的,所述遥控船体的后端开口处铰接有后舱门。
14.进一步的,所述基于遥控功能的水面清洁气垫船还包括动力推进机构,所述动力推进机构包括分别对称安装在所述遥控船体尾端底部两侧的正桨涵道推进器和反桨涵道推进器,所述正桨涵道推进器和反桨涵道推进器均与所述控制模块电性连接。
15.进一步的,所述基于遥控功能的水面清洁气垫船还包括水深调节机构,所述水深调节机构包括:
16.两个贮水仓,分别固定安装在所述遥控船体的两侧;
17.电磁阀,所述贮水仓的底部设有开口,所述开口处固定安装有所述电磁阀,所述电磁阀与所述控制模块电性连接;
18.排水泵,固定安装在所述贮水仓内,所述排水泵的进水口和出水口均固定连接有管道,所述排水泵的进水口和出水口通过所述管道分别与所述贮水仓和外部水体连通;
19.传感器,固定安装在所述遥控船体上,并与所述控制模块电性连接。
20.进一步的,所述传感器包括超声波传感器。
21.进一步的,所述遥控船体的顶部还固定安装有摄像头支架,所述摄像头支架上固定安装有摄像头,所述摄像头与所述通信模块电性连接,所述遥控器上安装有显示屏,所述摄像头能够通过所述通信模块将水面图像实时传输至所述遥控器上的显示屏。
22.与现有技术相比,本实用新型的有益效果包括:
23.所述基于遥控功能的水面清洁气垫船在工作时,工作人员可以在岸上遥控操作,避免了落水事故的发生;并且所述遥控船体的内部均可作为垃圾存放空间,具有较高的存放率;同时所述基于遥控功能的水面清洁气垫船中,所述遥控船体的尺寸可根据实际情况设计,使得所述基于遥控功能的水面清洁气垫船在中小型湖泊中也能灵活航行,避免了大型打捞船只无法在小型河流中打捞的缺点,能够胜任中小型湖泊垃圾清理的任务。
附图说明
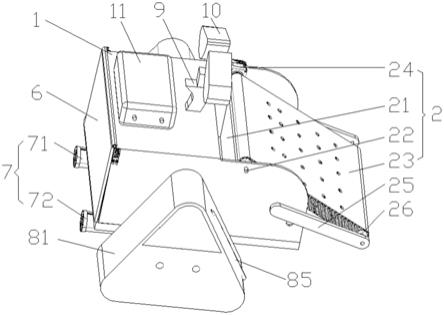
24.图1是本实用新型提供的一种基于遥控功能的水面清洁气垫船的结构示意图;
25.图2是本实用新型提供的一种基于遥控功能的水面清洁气垫船的工作原理示意图;
26.图3是本实用新型提供的一种基于遥控功能的水面清洁气垫船去掉遥控船体后的左视图;
27.图4是该实用新型实施例中水深调节机构的工作流程框图。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
29.本实用新型提供了一种基于遥控功能的水面清洁气垫船,其结构如图1 和图2所示,所述基于遥控功能的水面清洁气垫船包括遥控船体1和固定安装在所述遥控船体1上的垃圾收集储存机构2,其中,所述遥控船体1受外部遥控器3遥控工作,所述遥控船体1为前、后两端开口的箱体结构,所述垃圾收集储存机构2包括垃圾收纳箱21、两根滚动轴22、传送
带23和驱动件24,所述垃圾收纳箱21活动安装在所述遥控船体1内部;两根所述滚动轴22分别转动安装在所述遥控船体1前端开口处的顶部和底部,且两根所述滚动轴22位于两个竖直平面上;所述传送带23的首、尾两端分别套设在两个所述滚动轴22的外表面,使得所述传送带23倾斜设置在所述遥控船体1的前端开口处,且所述传送带23的底部高度不高于所述遥控船体1的底部高度;所述驱动件24固定安装在所述遥控船体1的侧壁,其输出端与位于顶部的所述滚动轴22固定连接。
30.在所述水面清洁船行进过程中,所述传送带23运行,水面漂浮垃圾顺着所述传送带23爬升,最终落入所述垃圾收纳箱21中进行储存。在该实施例中,所述驱动件24可以为步进电机。其中,通过遥控技术操控船只在水面上航行属于现有技术,对于相关的技术特征此处不再赘述。
31.所述基于遥控功能的水面清洁气垫船通过远程遥控操作,实现对水面漂浮垃圾进行收集和储存,与以往人工打捞水面垃圾相比,避免了人员落水事故的发生,并且为收集起来的垃圾腾出了空间,使得该水面清洁船一次能装下更多的水面垃圾,提高了水面垃圾打捞效率。
32.作为一个优选的实施例,所述垃圾收纳箱21沿水平方向滑动安装在所述遥控船体1内;所述传送带23上开有若干个漏水孔,能够在收集垃圾时能够对将垃圾中的水滤出,避免所述垃圾收纳箱21内因装入过多水而影响垃圾的装入量,使所述垃圾收纳箱21能够装入更多垃圾。
33.在该实施例中,所述遥控船体1和所述垃圾收纳箱21的材质可以是亚克力板、塑料板或不锈钢;所述传送带23可以是同步带,在工作时无滑动,有准确的传动比和较高的传动效率;且由于同步带不需要较大的张紧力,使得所述滚动轴22的尺寸可以减小,从而能够使所述垃圾收集储存机构2 具有较紧凑的结构。
34.作为优选的实施例,所述基于遥控功能的水面清洁气垫船还包括电性连接的控制模块4和通信模块5,所述控制模块4与所述驱动件24电性连接,所述通信模块5与所述遥控器3电性连接;当所述通信模块5接收到所述遥控器3发出的垃圾收集指令后,所述通信模块5将指令传输给所述控制模块4,所述控制模块4将指令转换为电信号并传递给所述驱动件24,所述驱动件24工作带动所述滚动轴22和所述传送带23运转,实现水面垃圾收集。
35.作为优选的实施例,所述遥控船体1前端开口处的两侧壁均固定连接有支架25,两个所述支架25向前延伸至所述遥控船体1的前端外部,位于底部的所述滚动轴22转动安装在两个所述支架25之间。
36.作为优选的实施例,所述滚动轴22的两端均固定安装有带轮26,所述传送带23套在所述带轮26上。
37.作为优选的实施例,所述遥控船体1的后端开口处铰接有后舱门6,方便放入或取出所述垃圾收纳箱21,从而倒出其内部的垃圾。
38.作为优选的实施例,所述基于遥控功能的水面清洁气垫船还包括动力推进机构7,所述动力推进机构7包括分别对称安装在所述遥控船体1尾端底部两侧的正桨涵道推进器71和反桨涵道推进器72,所述正桨涵道推进器71和反桨涵道推进器72均与所述控制模块4电性连接。所述正桨涵道推进器71和所述反桨涵道推进器72同速运行时,该水面清洁船横向作用力相互抵消,所述水面清洁船获得水平向前的推力,使得所述水面清洁船向前行进。
所述水面清洁船的转向采用差速转弯,即当所述正桨涵道推进器71 或所述反桨涵道推进器72速度不变,另一个速度减慢时,所述正桨涵道推进器71和所述反桨涵道推进器72之间形成速度差,所述水面清洁船便向速度慢的一侧转弯。
39.作为优选的实施例,请参照图2和图3,所述基于遥控功能的水面清洁气垫船还包括水深调节机构8,所述水深调节机构8包括两个贮水仓81、电磁阀82、排水泵83和传感器84,两个所述贮水仓81分别固定安装在所述遥控船体1的两侧;所述贮水仓81的底部设有开口,所述开口处固定安装有所述电磁阀82,所述电磁阀82与所述控制模块4电性连接;所述排水泵83固定安装在所述贮水仓81内,所述排水泵83的进水口和出水口均固定连接有管道85,所述排水泵83的进水口和出水口通过所述管道85分别与所述贮水仓81和外部水体连通;所述传感器84固定安装在所述遥控船体1上,并与所述控制模块4电性连接。在该实施例中,所述传感器84可以为超声波传感器,所述传感器84安装在所述遥控船体1的吃水线处。
40.如图4所示为所述水深调节机构8的工作流程框图,工作过程如下:
41.s1:所述传感器84测量所述遥控船体1的吃水线与水面的距离,并将测得的数据传递给所述控制模块4;
42.s2:所述控制模块4将测得的水位距离与预设距离比较;
43.s3:当测得的水位距离在预设距离范围时该水面清洁船正常运行;
44.当测得的水位距离大于预设距离范围时,此时所述水面清洁船吃水过浅,所述控制模块4控制所述电磁阀82打开,水由所述电磁阀82进入所述贮水仓81中,使所述遥控船体1下沉,期间,所述传感器84持续测量所述遥控船体1的吃水线与水面的距离,直至测量的距离处于设定的范围时,所述控制模块4控制所述电磁阀82关闭;
45.当测得的水位距离小于预设距离范围时,所述控制模块4控制所述排水泵83开启,所述排水泵83将所述贮水仓81中的水排出至所述贮水仓81 外,减轻所述遥控船体1的重量,使所述遥控船体1上浮,期间,所述传感器84持续测量所述遥控船体1的吃水线与水面的距离,直至测量的距离处于设定的范围时,所述控制模块4控制所述排水泵83关闭。
46.作为优选的实施例,所述遥控船体1的顶部还固定安装有摄像头支架9,所述摄像头支架9上固定安装有摄像头10,所述摄像头10与所述通信模块 5电性连接,所述遥控器3上安装有显示屏,所述摄像头能够通过所述通信模块5将水面图像实时传输至所述遥控器3上的显示屏。
47.作为优选的实施例,所述遥控船体的顶部还固定安装有电源11,为所述垃圾收集储存机构2、所述控制模块4、所述通信模块5、所述动力推进机构7、所述水深调节机构8以及所述摄像头10供电;所述遥控船体1的顶部还固定安装有太阳能电池板(图中未示出),所述太阳能电池板与所述电源11电性连接,能够为所述水面清洁船提供源源不断的电能,节约能源。
48.工作原理:
49.所述基于遥控功能的水面清洁气垫船在进入水域之前,检查各个机构是否正常工作,确认无异常后将其放入需要清理的水域中;然后,使用所述遥控器3开启所述水深调节机构8,使所述遥控船体1的吃水线高度处于设定高度范围;之后,使用所述遥控器3开启所述垃圾收集储存机构2和所述动力推进机构7,所述动力推进机构7推动所述水面清洁船在水面航行,航行途中,所述垃圾收集储存机构2运转,将水面漂浮的垃圾收集至所述垃圾收
纳箱21中储存;所述垃圾收纳箱21装满后,使用所述遥控器3操控所述水面清洁船航行至岸边,取出所述垃圾收纳箱21倒出垃圾后,重新装上所述垃圾收纳箱21,可以继续工作。
50.本实用新型实施例提供的所述基于遥控功能的水面清洁气垫船在工作时,工作人员可以在岸上遥控操作,避免了落水事故的发生;并且所述遥控船体1的内部均可作为垃圾存放空间,具有较高的存放率;同时所述基于遥控功能的水面清洁气垫船中,所述遥控船体1的尺寸可根据实际情况设计,使得所述基于遥控功能的水面清洁气垫船在中小型湖泊中也能灵活航行,避免了大型打捞船只无法在小型河流中打捞的缺点,能够胜任中小型湖泊垃圾清理的任务。
51.以上所述本实用新型的具体实施方式,并不构成对本实用新型保护范围的限定。任何根据本实用新型的技术构思所做出的各种其他相应的改变与变形,均应包含在本实用新型权利要求的保护范围内。