1.本发明涉及计算机控制技术领域,尤其涉及一种基于潜水电脑的潜水防护方法及系统。
背景技术:
2.潜水员在完成潜水作业离开高压环境向水面上升过程中,必须在不同深度停留必要的时间进行减压,使潜水员体内过饱和溶解的惰性气体排出体外,否则,轻则发生减压病,重则导致人员伤亡。潜水减压表是专门为潜水员制定的减压程序表,按照潜水减压表规定的减压参数来进行减压,可以使潜水员体内过饱和溶解的惰性气体以较快而又不致引起减压病的速度排出体外,从而安全地返回常压。
3.目前,在有水上工作人员配合的潜水作业过程中,水上工作人员记录潜水员潜水作业的潜水深度、预计潜水作业时长、实际潜水作业时长等信息,并以此为据对照潜水减压表选择合适的减压参数,全程控制潜水员的减压过程。其中,减压参数目前主要依据zh-l16数学模型计算得到,而zh-l16数学模型将人体分割成16种组织细胞,即16类理论组织,并给予它们不同的半衰期,且这些半衰期的值域从几分钟到几小时不等。在通过zh-l16数学模型计算出所有16类理论组织的最低允许环境压,并16类理论组织中最低允许环境压的数值最大者作为限制当前减压上限的理论组织,其最低允许环境压的数值最大者所对应的深度即为当前的减压上限。
4.具体的,在潜水员的减压过程中,需要水上工作人员从潜水减压表中进行快速搜索,选择出合适的减压参数来指导潜水员在减压上限以下的深度进行减压,因此对水上工作人员的专业要求十分严格。并且由于水上工作人员需要时刻关注潜水员的潜水作业过程,长时间的集中精力易导致水上工作人员疲劳,导致做出错误的判断,从而给潜水员带来安全隐患。
技术实现要素:
5.为解决上述问题,本发明提供的基于潜水电脑的潜水防护方法及系统,通过带有梯度因子的数学模型监控对应的理论身体组织最低允许环境绝对压,保证了潜水人员的身体健康。
6.第一方面,本发明提供一种基于潜水电脑的潜水防护方法,包括:
7.在第一减压阶段,根据潜水计划,采用带有梯度因子的数学模型计算得到理论身体组织最低允许环境绝对压,所述潜水计划包括:潜水目的地的深度、在目的深度所停留的时间、各个停留站的深度和在各个停留站理论需要停留的最少时间,所述第一减压阶段为在潜水目的地上升至最后一个停留站的过程;
8.在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输出可继续上升的提示信息;
9.其中,所述梯度因子用于缩减当前理论组织惰性气体张力与其最低允许环境压的差值,且所述梯度因子由潜水目的地的深度、梯度参考因子、当前所在深度和在当前所在深度停留的时间确定。
10.可选地,所述采用带有梯度因子的数学模型计算得到理论身体组织最低允许环境绝对压,包括:
11.根据当前理论组织惰性气体张力、所述梯度因子和预设的经验阈值,确定所述理论身体组织最低允许环境绝对压。
12.可选地,所述方法还包括:根据高经验参数、低经验参数和深度阈值,确定所述梯度因子;
13.所述高经验参数的取值范围为[0,1],所述低经验参数的取值范围为[0,1]。
[0014]
可选地,所述根据高经验参数、低经验参数和深度阈值,确定所述梯度因子,包括:
[0015]
将所述高经验参数与所述低经验参数相减,得到经验差值;
[0016]
将所述低经验参数的锚定点与所述高经验参数的锚定点相减,得到锚点差值;
[0017]
将所述低经验参数的锚定点与深度阈值相减,得到标定差值;
[0018]
将所述经验差值除以所述锚点差值,并与所述标定差值相乘,再与低经验参数相加,得到所述梯度因子。
[0019]
可选地,所述经验阈值包括:第一经验阈值和第二经验阈值;
[0020]
所述根据当前理论组织惰性气体张力、所述梯度因子和预设的经验阈值,确定所述理论身体组织最低允许环境绝对压,包括:
[0021]
将所述当前理论组织惰性气体张力减去梯度因子与第一经验阈值的乘积,得到第一数据;
[0022]
将所述梯度因子除以所述第二经验阈值得到的商,与所述梯度因子相加,并减去一个单位的数值,得到第二数据;
[0023]
将所述第一数据除以第二数据,得到所述理论身体组织最低允许环境绝对压。
[0024]
可选地,所述方法还包括:
[0025]
获取潜水前的理论组织呼吸惰性气体压和当前深度下的理论组织呼吸惰性气体压;
[0026]
将一个单位的数值减去e-tk
,得到第三数据,其中,e为自然常数,t为组织呼吸的惰性气体的半衰期,k为组织呼吸的惰性气体的半饱和时间常数;
[0027]
将当前深度下的理论组织呼吸惰性气体压减去潜水前的理论组织呼吸惰性气体压,得到第四数据;
[0028]
将所述第三数据和所述第四数据相乘,得到第五数据;
[0029]
将潜水前的理论组织呼吸惰性气体压与所述第五数据相加,得到所述当前理论组织惰性气体张力。
[0030]
可选地,所述方法还包括:
[0031]
在第二减压阶段,采用zh-l16数学模型计算得到理论身体组织最低允许环境绝对压;
[0032]
在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输
出提示信息,以提示可继续上升;
[0033]
其中,所述第二减压阶段为在最后一个停留站上升至水面的过程。
[0034]
第二方面,本发明提供一种基于潜水电脑的潜水防护系统,应用于第一减压阶段,包括:
[0035]
第一计算模块,被配置为在第一减压阶段,根据所述潜水计划,采用带有梯度因子的数学模型计算得到理论身体组织最低允许环境绝对压;
[0036]
第一输出模块,被配置为在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输出提示信息,以提示可继续上升;
[0037]
其中,所述梯度因子用于缩减当前理论组织惰性气体张力与其最低允许环境压的差值,且所述梯度因子由潜水目的地的深度、梯度参考因子、当前所在深度和在当前所在深度停留的时间确定。
[0038]
可选地,所述第一计算模块,包括:
[0039]
确定子模块,被配置为根据当前理论组织惰性气体张力、所述梯度因子和预设的经验阈值,确定所述理论身体组织最低允许环境绝对压。
[0040]
可选地,所述系统还包括确定模块,被配置为根据高经验参数、低经验参数和深度阈值,确定所述梯度因子;
[0041]
所述高经验参数的取值范围为[0,1],所述低经验参数的取值范围为[0,1];
[0042]
所述确定模块包括:
[0043]
第一计算子模块,被配置为将所述高经验参数与所述低经验参数相减,得到经验差值;
[0044]
第二计算子模块,被配置为将所述低经验参数的锚定点与所述高经验参数的锚定点相减,得到锚点差值;
[0045]
第三计算子模块,被配置为将所述低经验参数的锚定点与深度阈值相减,得到标定差值;
[0046]
第四计算子模块,被配置为将所述经验差值除以所述锚点差值,并与所述标定差值相乘,再与低经验参数相加,得到所述梯度因子。
[0047]
本发明实施例提供的基于潜水电脑的潜水防护方法及系统,其中,所述梯度因子用于缩减当前理论组织惰性气体张力与其最低允许环境压的差值,且所述梯度因子由潜水目的地的深度、梯度参考因子、当前所在深度和在当前所在深度停留的时间确定,从而通过带有梯度因子的数学模型动态调整并监控对应的理论身体组织最低允许环境绝对压,在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输出提示信息,以提示可继续上升保证了潜水人员的身体健康。
附图说明
[0048]
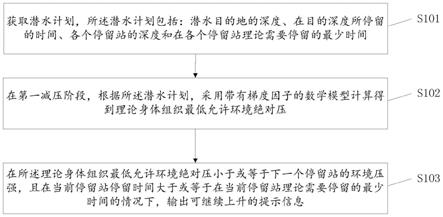
图1为本技术一实施例的基于潜水电脑的潜水防护方法的示意性流程图;
[0049]
图2为本技术一实施例的gf
low
与gf
high
分别为20和90的情况下的理论身体组织压力与环境压力关系图;
[0050]
图3为本技术一实施例的基于潜水电脑的潜水防护系统的示意性结构图。
具体实施方式
[0051]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0052]
第一方面,本发明提供一种基于zh-l16数学模型的基于潜水电脑的潜水防护方法,应用于第一减压阶段,参见图1,包括步骤s101至步骤s103:
[0053]
步骤s101:获取潜水计划,所述潜水计划包括:潜水目的地的深度、在目的深度所停留的时间、各个停留站的深度和在各个停留站理论需要停留的最少时间。
[0054]
在本实施例中,所述潜水目的地的深度为20米,在潜水目的地工作90分钟,且每上升3米设置一个停留站,最后一个停留站的深度为6米;在各个停留站理论需要停留的最少时间为3分钟。
[0055]
步骤s102:在第一减压阶段,根据所述潜水计划,采用带有梯度因子的数学模型计算得到理论身体组织最低允许环境绝对压。
[0056]
其中,所述第一减压阶段为在潜水目的地上升至最后一个停留站的过程。
[0057]
在一种可选的实施例中,所述方法还包括:根据高经验参数、低经验参数和深度阈值,确定所述梯度因子;所述高经验参数的取值范围为[0,1],所述低经验参数的取值范围为[0,1]。
[0058]
在本实施例中,所述根据高经验参数、低经验参数和深度阈值,确定所述梯度因子,包括:将所述高经验参数与所述低经验参数相减,得到经验差值;将所述低经验参数的锚定点与所述高经验参数的锚定点相减,得到锚点差值;将所述低经验参数的锚定点与深度阈值相减,得到标定差值;将所述经验差值除以所述锚点差值,并与所述标定差值相乘,再与低经验参数相加,得到所述梯度因子。
[0059]
具体的,参考公式一:
[0060][0061]
其中,gf
max
为梯度因子,gf
low
为低经验参数,gf
high
为高经验参数,a
l
为低经验参数对应的锚定点,ah为高经验参数对应的锚定点,d为深度阈值,例如当前深度为15米,在该深度停留时间为3分钟,则d为4.5。
[0062]
在本实施例中,所述方法可以根据潜水员的实际情况提供三组低经验参数和高经验参数的数值,参见表一,表一示出了gf
low
与gf
high
在不同比值下的保守值和免减压极限。
[0063]
表一
[0064][0065]
通过表一可知,gflow与gfhigh的比值越小,潜水上升的过程中的保守值就越高,其在潜水目的地免减压极限也低。在本实施例中,gflow与gfhigh值分别为潜水目的地的压强的20%和0.9tat。
[0066]
在一种可选的实施例中,所述采用带有梯度因子的数学模型计算得到理论身体组织最低允许环境绝对压,包括:根据当前理论组织惰性气体张力、所述梯度因子和预设的经验阈值,确定所述理论身体组织最低允许环境绝对压。
[0067]
在一种可选的实施例中,所述经验阈值包括:第一经验阈值和第二经验阈值;
[0068]
所述根据当前理论组织惰性气体张力、所述梯度因子和预设的经验阈值,确定所述理论身体组织最低允许环境绝对压,包括:将所述当前理论组织惰性气体张力减去梯度因子与第一经验阈值的乘积,得到第一数据;将所述梯度因子除以所述第二经验阈值得到的商,与所述梯度因子相加,并减去一个单位的数值,得到第二数据;将所述第一数据除以第二数据,得到所述理论身体组织最低允许环境绝对压。
[0069]
具体的,参考公式二:
[0070][0071]
其中,gf
max
为梯度因子,p
comp
为当前理论组织惰性气体张力,p
amb.tol
为该理论身体组织最低允许环境绝对压,a为第一经验阈值,b为第二经验阈值。
[0072]
在本实施例中,a和b的具体值参见表二,表二示出了不同的理论组织分别在氮气和氦气对应的半衰期以及a和b的值。
[0073]
表二
[0074][0075]
例如,第五个对照间隔的氮气半衰期为27分钟,所以
[0076][0077]
在一种可选的实施例中,所述方法还包括:获取潜水前的理论组织呼吸惰性气体压和当前深度下的理论组织呼吸惰性气体压;将一个单位的数值减去e-tk
,得到第三数据,其中,e为自然常数,t为组织呼吸的惰性气体的半衰期,k为组织呼吸的惰性气体的半饱和时间常数;将当前深度下的理论组织呼吸惰性气体压减去潜水前的理论组织呼吸惰性气体压,得到第四数据;将所述第三数据和所述第四数据相乘,得到第五数据;将潜水前的理论组织呼吸惰性气体压与所述第五数据相加,得到所述当前理论组织惰性气体张力。
[0078]
具体的,参考公式三:
[0079]
p
comp
=po+(pi-po)x((1-e-kt
)
ꢀꢀꢀꢀ
公式三
[0080]
其中,p
comp
为当前理论组织惰性气体张力,pi为当前深度下的理论组织呼吸惰性气体压,当前深度下的理论组织呼吸惰性气体压等于肺泡压减去水蒸气压,po为潜水前的理论组织呼吸惰性气体压,t为组织呼吸的惰性气体的半衰期,k为组织呼吸的惰性气体的半饱和时间常数,在本实施例中,组织呼吸的惰性气体为氮气。
[0081]
步骤s103:在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输出可继续上升的提示信息。
[0082]
其中,所述梯度因子用于缩减当前理论组织惰性气体张力与其最低允许环境压的差值,且所述梯度因子由潜水目的地的深度、梯度参考因子、当前所在深度和在当前所在深度停留的时间确定。
[0083]
参见图2,根据现有的理论,可基于理论身体组织最低允许环境绝对压将理论身体组织压力与环境压力关系图划分为过饱和极限区、过饱和区和未饱和区。其中,在过饱和区身体组织能够释放惰性气体,避免潜水员得减压病,而在过饱和极限区和未饱和区潜水员都无法避免得减压病的可能。具体在上升的过程中,当潜水员到达停留站停留3分钟后,系统每隔一段时间判断理论身体组织最低允许环境绝对压的数值与图中对应的数值进行对比,具体的,例如当理论身体组织最低允许环境绝对压对应于图2中的点1的位置处,潜水员在停留站处于等待停留的状态,此时理论身体组织最低允许环境绝对压开始下降;当理论身体组织最低允许环境绝对压下降至对应于图2中的点2的位置处时,系统输出提示信息,以提示可以继续上升;当潜水员上升至下一个停留站时,最低允许环境绝对压下降至对应于图2中的点3的位置处时,如此循环往复提醒潜水员上升。
[0084]
在该方法中,所述梯度因子用于缩减当前理论组织惰性气体张力与其最低允许环境压的差值,且所述梯度因子由潜水目的地的深度、梯度参考因子、当前所在深度和在当前所在深度停留的时间确定,从而通过带有梯度因子的数学模型动态调整并监控对应的理论身体组织最低允许环境绝对压,在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输出提示信息,以提示可继续上升保证了潜水人员的身体健康。
[0085]
在一种可选的实施例中,所述方法还包括:在第二减压阶段,采用zh-l16数学模型计算得到理论身体组织最低允许环境绝对压;在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理
论需要停留的最少时间的情况下,输出提示信息,以提示可继续上升。其中,所述第二阶段为在最后一个停留站上升至水面的过程。
[0086]
其中,zh-l16数学模型中的计算p
amb.to
公式为公式四。
[0087]
p
amb.tol
=(p
comp
-a)
×bꢀꢀꢀꢀ
公式四
[0088]
公式四中的各项参数与公式二中的对应参数相同,在此不做赘述。
[0089]
如停留规则规定最后一停留站在6m的话,前后两个停留站的理论身体组织最低允许环境绝对压p
amb.tol
之比增加的幅度会变得更快。因此,在最后几站出现引入gf后无法上升的可能性就比较大,所以本发明将潜水上升的过程分为两个阶段,如此能够保证潜水员快速安全的出水,具体的,参见表三,表三示出了呼吸压缩空气时各理论组织在6m饱和情况下的pamb.tol。
[0090]
表三
[0091][0092]
通过表三可知,在6m深处,各理论组织达到饱和的情况下,第1~15类组织的pamb.tol都<水面处大气压,只有半饱和时间最慢的第16类理论组织的pamb.tol接近水面处大气压。此时,若应用了gf,就有可能导致最慢的几类理论组织的pamb.tol数值>水面处大气压,致使无法出水。因此设置第二阶段进行潜水,能够有效的保证潜水员快速安全的出水。
[0093]
通过表四能够进一步分阶段进行减压的作用,表四为在p
comp
取252kpa,梯度因子选取70%时,分别通过公式二和公式四计算得到的pamb.tol,其中,无gf对应的pamb.tol由公式二计算出的pamb.tol,有gf对应的pamb.tol由公式四计算出的pamb.tol。
[0094]
表四
[0095][0096]
通过表四可知,16种不同身体组织都理论上可承受更多的压力,因此在第一阶段引入gf后,增加第一停留站深度作用较大深度的第一停留站,可减少上升过程中气泡的产生,从而降低减压病的发病率。梯度因子限制了每一站停留时间的延长程度,即梯度因子设定的数值越低,减压方案越保守。在第二阶段,能够有效的保证潜水员快速安全的出水。
[0097]
第二方面,本发明提供一种基于潜水电脑的潜水防护系统200,应用于第一减压阶段,结合图3,包括:
[0098]
第一获取模块201,被配置为获取潜水计划,所述潜水计划包括:潜水目的地的深度、在目的深度所停留的时间、各个停留站的深度和在各个停留站理论需要停留的最少时间;
[0099]
第一计算模块202,被配置为在第一减压阶段,根据所述潜水计划,采用带有梯度因子的数学模型计算得到理论身体组织最低允许环境绝对压;
[0100]
第一输出模块203,被配置为在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输出提示信息,以提示可继续上升;
[0101]
其中,所述梯度因子用于缩减当前理论组织惰性气体张力与其最低允许环境压的差值,且所述梯度因子由潜水目的地的深度、梯度参考因子、当前所在深度和在当前所在深度停留的时间确定。
[0102]
在一种可选的实施例中,所述第一计算模块202,包括:
[0103]
确定子模块,被配置为根据当前理论组织惰性气体张力、所述梯度因子和预设的经验阈值,确定所述理论身体组织最低允许环境绝对压。
[0104]
在一种可选的实施例中,所述系统200还包括确定模块,被配置为根据高经验参数、低经验参数和深度阈值,确定所述梯度因子;
[0105]
所述高经验参数的取值范围为[0,1],所述低经验参数的取值范围为[0,1];
[0106]
所述确定模块包括:
[0107]
第一计算子模块,被配置为将所述高经验参数与所述低经验参数相减,得到经验差值;
[0108]
第二计算子模块,被配置为将所述低经验参数的锚定点与所述高经验参数的锚定点相减,得到锚点差值;
[0109]
第三计算子模块,被配置为将所述低经验参数的锚定点与深度阈值相减,得到标定差值;
[0110]
第四计算子模块,被配置为将所述经验差值除以所述锚点差值,并与所述标定差值相乘,再与低经验参数相加,得到所述梯度因子。
[0111]
所述经验阈值包括:第一经验阈值和第二经验阈值;
[0112]
所述确定子模块,包括:
[0113]
第一计算单元,被配置为将所述当前理论组织惰性气体张力减去梯度因子与第一经验阈值的乘积,得到第一数据;
[0114]
第二计算单元,被配置为将所述梯度因子除以所述第二经验阈值得到的商,与所述梯度因子相加,并减去一个单位的数值,得到第二数据;
[0115]
第三计算单元,被配置为将所述第一数据除以第二数据,得到所述理论身体组织最低允许环境绝对压。
[0116]
在一种可选的实施例中,所述系统200还包括:
[0117]
第二获取模块,被配置为获取潜水前的理论组织呼吸惰性气体压和当前深度下的理论组织呼吸惰性气体压;
[0118]
第二计算模块,被配置为将一个单位的数值减去e-tk
,得到第三数据,其中,e为自然常数,t为组织呼吸的惰性气体的半衰期,k为组织呼吸的惰性气体的半饱和时间常数;
[0119]
第三计算模块,被配置为将当前深度下的理论组织呼吸惰性气体压减去潜水前的理论组织呼吸惰性气体压,得到第四数据;
[0120]
第四计算模块,被配置为将所述第三数据和所述第四数据相乘,得到第五数据;
[0121]
第五计算模块,被配置为将潜水前的理论组织呼吸惰性气体压与所述第五数据相加,得到所述当前理论组织惰性气体张力。
[0122]
在一种可选的实施例中,应用于第二阶段,所述系统200还包括:
[0123]
第六计算模块,被配置为采用zh-l16数学模型计算得到理论身体组织最低允许环境绝对压;
[0124]
第二输出模块,被配置为在所述理论身体组织最低允许环境绝对压小于或等于下一个停留站的环境压强,且在当前停留站停留时间大于或等于在当前停留站理论需要停留的最少时间的情况下,输出提示信息,以提示可继续上升;
[0125]
其中,所述第一阶段为在潜水目的地上升至最后一个停留站的过程,所述第二阶段为在最后一个停留站上升至水面的过程。
[0126]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。