1.本发明涉及船体清洗设备技术领域,尤其涉及一种水下刚体下探装置。
背景技术:
2.远洋船舶在经过常年的航行后,其吃水线以下的船体外壳上会形成一层由藻类、贝类附着物构成的垢层,这些垢层的存在,会大大增加船舶阻力,使船舶降速约8%,严重时油耗增加38%,是目前船舶航期延误,运营成本增大的主要原因。
3.大型货轮在干船坞内的清洗费用十分昂贵,全球船舶行业每年的船舶清洗费用接近100亿美元,昂贵的清洗费用导致许多船公司采用派遣潜水员检查船体并清除生物污垢的方式,这些潜水员在水下使用刮板和洗涤器手动清洁船体,水下极端恶劣的工作环境使清洗效率低,且潜水员危险系数高。此外,潜水员在水下的身体承受能力有限,操作时间和范围同样受限,导致其工作效率低,清洗质量难以保证。
4.基于此,能够清洗水下船体附着物的机器人正逐渐被推广应用,水下船体清洗机器人技术的关键在于定位准确,目前船体清洗机器人水下定位通常采用的方式是利用钢管分段连接或缆绳向水下深入,将sbl收发器置于清洗母船外侧。该定位系统收发采用一对多和多对一设置,根据信号到达各基元的时间,求得多组斜距,据此可计算水下机器人与相对清洗母船的位置。目前此种方式仍具有很多弊端没有解决。
5.船体清洗机器人水下定位过程中,为了尽力避免船体对声波的反射照成的干扰,收发器需离船体一段距离。同时,根据现有收发器的使用经验,收发器在水下摆动幅度尽力保持在0.5m以内,最大不能超过3m,摆动幅度过大会影响信号传输。
6.钢管分段连接或缆绳下水,不但人员劳动强度大,而且稳定性差。下水深度超过5m后,收发器在水下有大幅度的晃动,如果遇到3节或者4节洋流,晃动更加剧烈。目前大型船只的吃水线为25m左右,在25m左右的深度下,环境更加恶劣,无法实现精确定位。
7.此外,水下船体清洗机器人经常需要持续性工作,单纯依靠钢管或者缆绳,显然无法满足收发器的下放要求。
技术实现要素:
8.本发明的目的是为了解决现有技术中加长杆是钢管分段连接后下水,人员劳动强度大,如果利用缆绳下水,则收发器在水下有大幅度晃动的问题,而提出的一种水下刚体下探装置。
9.为了实现上述目的,本发明采用了如下技术方案:
10.一种水下刚体下探装置,包括:可独立安装的支撑架;安装于支撑架上、用于下探的伸缩机构;顶部与伸缩机构连接、用于为伸缩机构提供动力的传动机构;所述伸缩机构为剪式刚体结构,在伸缩机构的带动下完成下探和回收动作。
11.进一步,所述伸缩机构由若干相互铰接的伸缩单元组成,单个所述伸缩单元包括:
12.两对交错设置的剪式连杆;连接两对剪式连杆的交错点、支撑两对剪式连杆的铰
接杆;相邻伸缩单元的一对剪式连杆之间设置有铰接杆;伸缩机构顶部的两对剪式连杆之间分别由铰接杆a与铰接杆b连接;伸缩机构末端设置有铰接杆c,伸缩机构底部的两对剪式连杆交汇于铰接杆c两端;铰接杆b的两端固定连接于支撑架上;相邻伸缩单元之间的一对剪式连杆、单个伸缩单元的一对剪式连杆转动连接。
13.进一步,所述传动机构包括:安装于支撑架上的伺服电机;转动连接于伺服电机输出端的丝杠;内部设置有与丝杠反向的螺纹、套接于丝杠上的、底部与铰接杆a固定连接的传动块;设置于铰接杆a的两端,与铰接杆a滑动连接的两条滑轨。
14.进一步,还包括缆绳机构,所述缆绳机构包括:安装于支撑架上的扭矩电机;连接于扭矩电机输出端的绕线辊;绕设于绕线辊上的辅助缆绳;设置于铰接杆两端的滑轮;辅助缆绳穿过若干滑轮连接于铰接杆c的端部。
15.优选地,所述伸缩机构底部固定连接有搭载平台,所述搭载平台上搭载有sbl收发器。
16.优选地,所述支撑架的底部固定连接有多个万向自锁轮。
17.优选地,所述支撑架的一侧安装有第一锁紧机构,所述第一锁紧机构包括第一锁紧螺杆和第一旋钮,所述第一锁紧螺杆沿y轴方向架设于支撑架的架体上,所述第一旋钮与第一锁紧螺杆的首端固定连接;第一锁紧螺杆末端对应的支撑架上设置有锁紧螺母,第一锁紧螺杆旋入锁紧螺母用于锁紧船舷竖向肋板。
18.进一步,所述支撑架的一侧安装有第二锁紧机构,所述第二锁紧机构包括第二锁紧螺杆和第二旋钮,所述第二锁紧螺杆沿x轴方向架设于支撑架的架体上,所述第二旋钮与第二锁紧螺杆的首端固定连接;第二锁紧螺杆末端对应的支撑架上设置有锁紧螺母,第二锁紧螺杆旋入锁紧螺母用于锁紧船舷横向肋板。
19.优选地,所述伺服电机和扭矩电机与支撑架的顶部均通过固定板连接。
20.优选地,所述丝杠远离伺服电机的一端通过支撑块与支撑架连接,所述支撑块底部固定连接于支撑架上,顶部与丝杠转动连接。
21.有益效果:
22.第一、本发明相比于软性绳索或细长杆体,剪式连接的刚体伸缩机构通过电机控制,具有自由下探、自由回收,具有响应速度快、可持续工作的特点;
23.第二、搭配的缆绳机构,在下放到指定位置后,通过电机带动反向拉紧,可保持整个装置的高稳定性,经验证,可在节或节流速的洋流中保持较小的摆动幅度连续工作小时以上,传输信号稳定,误差低;
24.第三、装置设置有万向自锁轮和锁紧机构,不使用时方便移动,使用时充分固定和锁紧,可适用于船体等多种场景;
25.第四、本发明可完全实现电动控制,伸长和收缩均由控制中心通过给电机发送信号进行操作,自动化程度高,节省人力。
附图说明
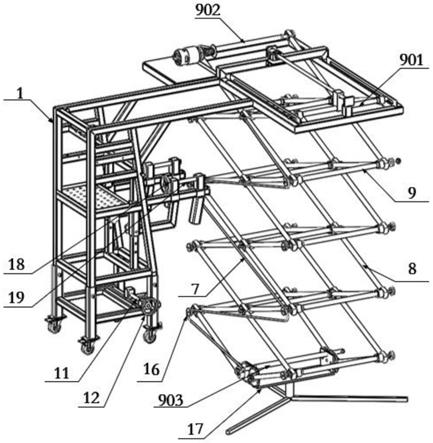
26.图1为本发明提出的一种水下刚体下探装置的整体结构示意图;
27.图2是本发明提出的一种水下刚体下探装置伸缩机构、缆绳机构结构示意图;
28.图3为本发明提出的一种水下刚体下探装置万向自锁轮处的结构示意图;
29.图4为本发明提出的一种水下刚体下探装置传动机构的结构示意图;
30.图5为本发明提出的一种水下刚体下探装置的第一锁紧机构的结构示意图。
31.图6为本发明提出的一种水下刚体下探装置的第二锁紧机构的结构示意图。
32.图中:1支撑架、2伺服电机、3扭矩电机、4丝杆、5传动块、6绕线辊、7辅助缆绳、8剪式连杆、9铰接杆、901铰接杆a、902铰接杆b、903铰接杆c、10万向自锁轮、11锁紧螺杆、12旋钮、13固定板、14支撑块、15滑轨、16滑轮、17搭载平台、18第二锁紧螺杆、19第二旋钮。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
34.参照图1
‑
6,一种水下刚体下探装置,包括支撑架1、传动机构和伸缩机构,支撑架1的底部固定连接有多个万向自锁轮10,传动机构与支撑架1的顶部固定连接,传动机构的输出端与伸缩机构固定连接,传动机构包括伺服电机2和扭矩电机3,伺服电机2和扭矩电机3与支撑架1的顶部均通过固定板13固定连接,伺服电机2的输出端固定连接有丝杠4,用于带动传动块5水平移动,丝杠4远离伺服电机2的一端转动连接有支撑块14,支撑块14与支撑架1的顶部固定连接。
35.本实施中,伸缩机构由若干相互铰接的伸缩单元组成,单个所述伸缩单元包括:两对交错设置的剪式连杆8;连接两对剪式连杆8的交错点、支撑两对剪式连杆8的铰接杆9;相邻伸缩单元的一对剪式连杆8之间设置有铰接杆9;伸缩机构顶部的两对剪式连杆8之间分别由铰接杆a901与铰接杆b902连接;伸缩机构末端设置有铰接杆c903,伸缩机构底部的两对剪式连杆8交汇于铰接杆c903两端;铰接杆b902的两端固定连接于支撑架1上;相邻伸缩单元之间的一对剪式连杆8、单个伸缩单元的一对剪式连杆8转动连接。
36.本实施例中,传动机构包括:安装于支撑架1上的伺服电机2;转动连接于伺服电机2输出端的丝杠4;内部设置有与丝杠4反向的螺纹、套接于丝杠4上的、底部与铰接杆a901固定连接的传动块5;设置于铰接杆a901的两端,与铰接杆a901滑动连接的两条滑轨15。
37.本实施例中,还包括缆绳机构,所述缆绳机构包括:安装于支撑架1上的扭矩电机3;连接于扭矩电机3输出端的绕线辊6;绕设于绕线辊6上的辅助缆绳7;设置于铰接杆9两端的滑轮16;辅助缆绳7穿过若干滑轮16连接于铰接杆c903的端部。所述缆绳机构可以设置有两个,辅助缆绳7分别穿过铰接杆9两侧的滑轮16末端连接于铰接杆c903的两端。
38.本实施例中,所述伸缩机构底部固定连接有搭载平台17,所述搭载平台17上搭载有sbl收发器。
39.本发明的一种水下刚体下探装置在使用时,支撑架1的底部的多个万向自锁轮10,方便移动固定装置。
40.本实施例中,所述支撑架1的一侧安装有第一锁紧机构,所述第一锁紧机构包括第一锁紧螺杆11和第一旋钮12,所述第一锁紧螺杆11沿y轴方向架设于支撑架1的架体上,所述第一旋钮12与第一锁紧螺杆11的首端固定连接;第一锁紧螺杆11末端对应的支撑架1上设置有锁紧螺母,第一锁紧螺杆11旋入锁紧螺母用于锁紧船舷竖向肋板。
41.支撑架1的一侧安装有第二锁紧机构,所述第二锁紧机构包括第二锁紧螺杆19和第二旋钮18,所述第二锁紧螺杆19沿x轴方向架设于支撑架1的架体上,所述第二旋钮18与
第二锁紧螺杆19的首端固定连接;第二锁紧螺杆19末端对应的支撑架1上设置有锁紧螺母,第二锁紧螺杆19旋入锁紧螺母锁紧船舷横向肋板。
42.使用时,将伸缩机构伸出船舷至海面上方,然后利用万向自锁轮10将支撑架1固定住,通过第一旋转旋钮12将第一锁紧螺杆11的自由端连接于支撑架1的架体上,船舷竖向肋板穿过第一锁紧螺杆11与支撑架1之间的空间,使支撑架1与船舷竖向肋板进行固定锁紧。同进第二锁紧螺杆19旋入锁紧螺母锁紧船舷横向肋板。
43.根据所需作业深度,计算伺服电机2的转动角度,并启动伺服电机2。伺服电机2带动丝杠4转动,通过传动块5带动铰接杆901a沿滑轨15滑动,将伸缩机构展开,带动sbl收发器下探深入至要求深度。此时,扭矩电机3启动,带动辅助缆绳7反向拉紧,使整个伸缩机构保持稳定。回收时,辅助缆绳7松开,伺服电机2反向工作至复位点,作业完毕。然后松开第一锁紧机构与第二锁紧机构,松开万向自锁轮10,整个下探装置拉回存放位置。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。