1.本实用新型涉及障碍识别技术领域,尤其涉及一种无人船航线检测装置。
背景技术:
2.无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,英文缩写为usv。现今,不少国家已开始研制无人船。一些船业巨头甚至乐观预测:也许只需几十年,发展成熟的“幽灵船”技术将改写全球远洋运输的面貌。另有业界人士预计,全球无人船市场规模2019年可能达到大约100亿美元。
3.现有的无人船航线检测装置不便根据需求改变安装的高度,导致难以达到理想的检测深度,监测效果不理想;而且现有的无人船航线检测装置对检测主体的安装较为固定,导致不便拆卸,造成了难以检修的问题。因此,有必要提供一种无人船航线检测装置解决上述技术问题。
技术实现要素:
4.本实用新型提供一种无人船航线检测装置,解决了现有的无人船航线检测装置不便根据需求改变安装的高度,导致难以达到理想的检测深度,监测效果不理想;而且现有的无人船航线检测装置对检测主体的安装较为固定,导致不便拆卸,造成了难以检修的技术问题。
5.为解决上述技术问题,本实用新型提供的一种无人船航线检测装置,包括识别检测装置本体,所述识别检测装置本体的前、后表面均固定安装有矩形框架,所述矩形框架的内部插接有立杆,所述立杆的上表面开设有连接槽,所述连接槽的内部插接有连接杆,所述连接杆的一侧开设有滑槽,所述滑槽的内侧均匀固定安装有多个卡齿,所述立杆的一侧固定安装有安装壳体,所述安装壳体的内侧固定安装有第三弹簧,所述第三弹簧的一端固定连接有贯穿立杆的卡固块,所述卡固块的一侧固定安装有贯穿安装壳体的连动杆。
6.在其中一个实施例中,所述识别检测装置本体的一侧对称固定安装有空腔体,每个所述空腔体的内侧均固定安装有第二弹簧,所述第二弹簧的一端固定连接有活动块,所述活动块的一侧固定安装有贯穿空腔体的活动柱,两个所述活动柱的一端共同固定连接有缓冲板。
7.在其中一个实施例中,所述连接杆的上端固定连接有固定块,所述固定块的一侧均匀开设有四个固定孔。
8.在其中一个实施例中,所述连动杆位于第三弹簧的内部,且所述连动杆与卡固块为一体成型结构。
9.在其中一个实施例中,相邻两个所述卡齿的间距为0.20mm,所述连接杆呈“l”型结构。
10.在其中一个实施例中,所述立杆的一侧开设有插固槽,所述矩形框架的一侧固定安装有第一弹簧,所述第一弹簧的一端固定连接有贯穿矩形框架的插固杆,所述插固杆与
插固槽之间插接。
11.在其中一个实施例中,所述插固杆位于第一弹簧的内部,且所述插固杆呈“l”型结构。
12.上述无人船航线检测装置,由于采用上述技术,使之与现有技术相比具有的积极效果是:
13.1、本实用新型提供一种无人船航线检测装置,通过拉动连动杆,压缩第三弹簧,实现与其连接的卡固块脱落相邻两个卡齿的齿牙间隙,从而方便对连接杆的高度进行调整,解决了现有的无人船航线检测装置不便根据需求改变安装的高度,导致难以达到理想的检测深度,监测效果不理想的问题。
14.2、本实用新型提供一种无人船航线检测装置,通过拉动插固杆,拉伸第一弹簧,实现插固杆的一端脱离立杆所开设的插固槽内部,从而使矩形框架脱离立杆的外侧,解决了现有的无人船航线检测装置对检测主体的安装较为固定,导致不便拆卸,造成了难以检修的问题。
附图说明
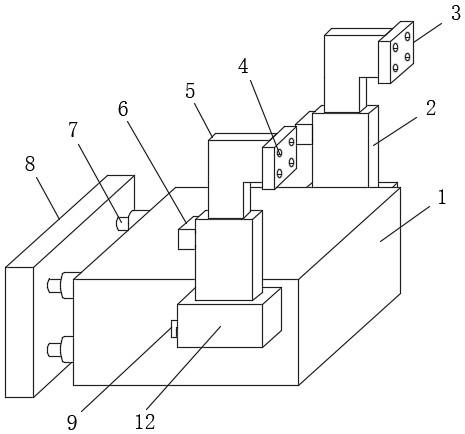
15.图1为本实用新型提供的一种无人船航线检测装置的一种较佳实施例的结构示意图;
16.图2为本实用新型的主视结构示意图;
17.图3为本实用新型的活动柱与空腔体连接结构示意图;
18.图4为本实用新型的a部局部放大图。
19.附图标记:1、识别检测装置本体;2、立杆;3、固定块;4、固定孔;5、连接杆;6、安装壳体;7、活动柱;8、缓冲板;9、插固杆;10、空腔体;11、第一弹簧;12、矩形框架;13、卡齿;14、滑槽;15、连接槽;16、插固槽;17、活动块;18、第二弹簧;19、第三弹簧;20、连动杆;21、卡固块。
具体实施方式
20.下面将结合本实用新型的附图和具体实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.实施例一:
22.请参阅图1
‑
4,本实用新型提供一种技术方案:一种无人船航线检测装置,包括识别检测装置本体1,识别检测装置本体1的前、后表面均固定安装有矩形框架12,矩形框架12的内部插接有立杆2,立杆2的上表面开设有连接槽15,连接槽15的内部插接有连接杆5,连接杆5的一侧开设有滑槽14,滑槽14的内侧均匀固定安装有多个卡齿13,立杆2的一侧固定安装有安装壳体6,安装壳体6的内侧固定安装有第三弹簧19,第三弹簧19的一端固定连接有贯穿立杆2的卡固块21,卡固块21的一侧固定安装有贯穿安装壳体6的连动杆20,识别检测装置本体1的一侧对称固定安装有空腔体10,每个空腔体10的内侧均固定安装有第二弹簧18,第二弹簧18的一端固定连接有活动块17,活动块17的一侧固定安装有贯穿空腔体10
的活动柱7,两个活动柱7的一端共同固定连接有缓冲板8,连接杆5的上端固定连接有固定块3,固定块3的一侧均匀开设有四个固定孔4,连动杆20位于第三弹簧19的内部,且连动杆20与卡固块21为一体成型结构,相邻两个卡齿13的间距为0.20mm,连接杆5呈“l”型结构。
23.本实施方案中,通过拉动连动杆20,压缩第三弹簧19,实现与其连接的卡固块21脱落相邻两个卡齿13的齿牙间隙,从而方便对连接杆5的高度进行调整,解决了现有的无人船航线检测装置不便根据需求改变安装的高度,导致难以达到理想的检测深度,监测效果不理想的问题。
24.实施例二:
25.请参阅图1
‑
4所示,在实施例一的基础上,本实用新型提供一种技术方案:立杆2的一侧开设有插固槽16,矩形框架12的一侧固定安装有第一弹簧11,第一弹簧11的一端固定连接有贯穿矩形框架12的插固杆9,插固杆9与插固槽16之间插接,插固杆9位于第一弹簧11的内部,且插固杆9呈“l”型结构。
26.本实施方案中,通过拉动插固杆9,拉伸第一弹簧11,实现插固杆9的一端脱离立杆2所开设的插固槽16内部,从而使矩形框架12脱离立杆2的外侧,解决了现有的无人船航线检测装置对检测主体的安装较为固定,导致不便拆卸,造成了难以检修的问题。
27.本实用新型提供的一种无人船航线检测装置的工作原理如下:
28.安装时,首先采用螺钉将固定块3固定于无人船船体上,然后根据需求调整识别检测装置本体1的高度,通过拉动连动杆20,压缩第三弹簧19,使与其连接的卡固块21脱落相邻两个卡齿13的齿牙间隙,将立杆2在连接槽15的内部升降后,再次在第三弹簧19的弹力作用下,使卡固块21卡进对应高度处相邻两个卡齿13的齿牙间隙,将调整高度后的识别检测装置本体1固定。需要拆卸识别检测装置本体1时,拉动插固杆9,拉伸第一弹簧11,使插固杆9的一端脱离连接杆5所开设的插固槽16内部,之后将立杆2从矩形框架12的内部取出,实现拆卸下识别检测装置本体1。
29.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
30.以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。