1.本发明属于船舶领域,涉及一种喷水推进器总推力的测量技术,具体涉及一种外悬式喷水推进船模自航试验测试系统,用于航行中喷水推进器进口速度分布和喷口流量。
背景技术:
2.近年来随着船舶设计航速的不断提高,喷水推进技术在多种高速军舰和游艇等船型中的应用越来越广泛,喷水推进器功率密度高,占用安装空间小,且在高速航向状态下抗空化和腐蚀性能好,因此喷水推进是一种高速船舶常采用的推进方式,而且喷水推进器也有逐渐朝着大型化、大功率的方向发展的趋势。而船模自航试验作为喷水推进船舶快速性预报的重要步骤,对喷水推进船舶的发展具有重要意义,但由于喷水推进器流道和船底板融为一体,常规的螺旋桨船舶自航测试系统和测试方案对于喷水推进船舶并不适用,使得喷水推进器总推力的测量一直是喷水推进船舶测试领域难题。
3.在喷水推进技术领域,对于喷水推进器总推力的测量常采用的方法有“静压测试法”和“动量通量法”,若采用“静压测试法”,即通过测试船体表面静压换算,间接得到船体附近流动的速度分布,则需要在船体表面开孔,而且精度不高,同时船体还存在潜在的漏水的风险。若采用喷水推进技术领域常用的“动量通量法”开展喷水推进船舶的快速性预报,即通过采集流入和流出喷水推进器的水流的动量差计算得到喷水推进器的总推力,则喷水推进器进口获流区和喷口区域速度分布的准确测量至关重要。
技术实现要素:
4.本发明的主要目的在于提供一种外悬式喷水推进船模自航试验测试系统,通过采用“动量通量法”的测量方法,希望在不影响船体水密性的前提下通过较小的改造,来获取船体附近流场速度分布,从而解决喷水推进船模自航试验测试喷水推进器总推力测量困难的技术难题。
5.本发明是这样实现的:
6.本发明提供了一种外悬式喷水推进船模自航试验测试系统,其特征在于:本测试系统采用模块化设计,包括喷水推进船模、测力天平模块、外悬测试模块和信号处理模块;所述喷水推进船模尾部设有用于提供推进动力的喷水推进器,所述喷水推进船模通过所述测力天平模块与拖车相连,通过所述测力天平模块能获取所述喷水推进船模自航状态下的强制力;所述外悬测试模块设置在所述喷水推进船模上,用于获取所述喷水推进器进出口相应区域的流速分布信息;所述测力天平模块和所述外悬测试模块的信号输出端均还与所述信号处理模块相连,通过所述信号处理模块能将所述外悬测试模块获取到的流速信息和所述喷水推进船模自航状态下的强制力大小转换成电信号,并统一进行计算和处理。
7.优选的,所述测力天平模块包括测力天平和连杆,所述测力天平设置在所述喷水推进船模上,所述测力天平模块上设有连杆,所述测力天平设置在所述喷水推进船模上,所述测力天平的输出端与连杆一端相连,所述连杆的另一端与拖车上的测桥相连。
8.优选的,所述外悬测试模块包括毕托管阵列和独立毕托管;所述毕托管阵列通过平移升降机构悬挂于喷水推进器的入口处的喷水推进船模船体舷侧,通过平移升降机构能自由调节毕托管阵列在横向、纵向和垂向三个方向上的位置,从而快速获取被测量流场内多个位置处速度分布;所述独立毕托管通过二维移动平台悬挂于喷水推进船模船体背部的喷水推进器喷口处。
9.优选的,所述信号处理模块包括测试主机、压差传感器和数据采集仪;所述压差传感器与毕托管数量一一匹配,所述压差传感器的两个输入端分别与毕托管的静压端和全压端相连,用于测量毕托管的静压端和全压端的压差,并转换为流速信号;所述压差传感器的输出通过信号线与所述数据采集仪相连,所述数据采集仪与所述测试主机相连。
10.优选的,所述平移升降机构为由升降机构、横向平移机构和纵向平移机构组成的三维移动平台。
11.优选的,所述二维移动平台由升降机构和横向平移机构组成,能驱动独立毕托管在喷水推进器的喷口所在平面内移动。
12.优选的,所述数据采集仪输入端采用的是4通道或8通道。
13.本发明有益效果是:
14.本发明提供这种外悬式喷水推进船模自航试验测试系统采用的是“动量通量法”的测量方法,对喷水推进船模的改造小,能够在不影响船体水密性的前提下获取船体附近流场速度分布,关注流场的多点测量效率高,测试系统的通用性和适用性较好,适用于不同类型和构型的喷水推进船模自航试验研究。
附图说明
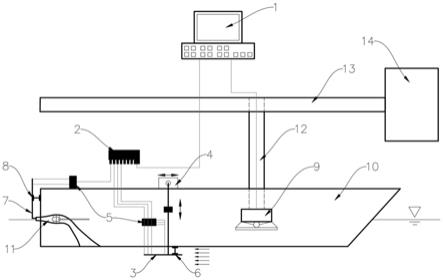
15.图1为本发明实施例提供的一种外悬式喷水推进船模自航试验测试系统的主视图;
16.图2为本发明实施例提供的一种外悬式喷水推进船模自航试验测试系统的侧视图;
17.图3为本发明实施例提供的毕托管阵列部分俯视图。
18.图中:1
‑
测试主机,2
‑
数据采集仪,3
‑
毕托管阵列,4
‑
平移升降机构,5
‑
压差传感器,6
‑
船体辅助支撑件,7
‑
独立毕托管,8
‑
二维移动平台,9
‑
测力天平,10
‑
喷水推进船模,11
‑
喷水推进器,12
‑
连杆,13
‑
测桥,14
‑
拖车。
具体实施方式
19.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
20.本发明提供了一种外悬式喷水推进船模自航试验测试系统,本测试系统采用模块化设计,包括喷水推进船模10、测力天平模块、外悬测试模块和信号处理模块,所述喷水推进船模10通过所述测力天平模块与拖车14相连,通过所述测力天平模块能获取所述喷水推进船模10自航状态下的强制力,所述外悬测试模块设置在所述喷水推进船模10上,用于获取所述喷水推进船模10相应区域的流速分布信息,所述测力天平模块和所述外悬测试模块的信号输出端均还与所述信号处理模块相连,通过所述信号处理模块能将所述外悬测试模
块获取到的流速信息和所述喷水推进船模10自航状态下的强制力大小转换成电信号,并统一进行计算和处理,具体的:
21.如图1所示,在本实施例中,所述测力天平模块包括测力天平9和连杆12,所述测力天平9设置在所述喷水推进船模10上,所述测力天平9上设有连杆12,所述连杆12的另一端与拖车14上的测桥13相连,通过连杆12使得喷水推进船模10与测桥13保持刚性连接,测桥13与拖车14相连,如图1所示,通过拖车14驱动测桥13带动喷水推进船模10向右运动进行航行试验,试验时所述喷水推进船模10会在喷水推进器11的推力、船模阻力及拖车14的牵引力组成的合力作用下运动,通过所述测力天平模块,即能够实时获取所述喷水推进船模10在试验时的强制力的大小,也即是自航力。
22.如图2和图3所示,所述外悬测试模块包括毕托管阵列3和独立毕托管7;所述毕托管阵列3为由多个所述毕托管组成相同高度的一排,所述毕托管阵列3通过船体辅助支撑件6悬挂于喷水推进器11进水口处喷水推进船模10船体舷侧,通过平移升降机构4能驱动所述毕托管阵列3横向、纵向和垂向三个方向上移动,从而调整毕托管阵列3在横向、纵向和垂向三个方向上的位置,可一次性获取被测量流场内多个位置处速度分布;本实施例中,所述平移升降机构4为由升降机构、横向平移机构和纵向平移机构组成的三维移动平台,具体的,可以采用3组丝杠螺母滑台相连组成,具体采用现有公知技术即可,本发明不再赘述,平移升降机构4安装在处喷水推进船模10船体舷上,所述毕托管阵列3通过船体辅助支撑件6悬挂在喷水推进船模10船体舷侧后与平移升降机构4的输出端相连,所述船体辅助支撑件6有两个,分别位于喷水推进船模10底部和侧面,共同支撑毕托管阵列3,船体辅助支撑件6为具体三个位置导向运动的辅助滑台支架,使得毕托管阵列3具有横向、纵向和垂向三个方向上移动的自由度。
23.所述独立毕托管7通过二维移动平台8悬挂于喷水推进船模10尾部的喷水推进器11喷口处,用于获取喷水推进器11喷口获流区分布,流场测试效率高,所述二维移动平台8由升降机构和横向平移机构组成,能驱动独立毕托管7在喷水推进器11的喷口所在平面内移动,进行多点测量。通过毕托管阵列3和独立毕托管7能高效的同时完成喷水推进器11的进口和喷口处速度分布的多点测量。
24.所述外悬测试模块所获取的具体数据包括进流口速度分布v1,喷口速度v
j
。上述数据可用于喷水推进器11的推力t计算。喷水推进器11推力的t计算公式如下:
25.t=ρq(v
j
‑
αv0)
26.其中,ρ是流体密度,v0为船模航速,上述变量为试验条件和工况参数,可直接获取;q是推进器流量,α是动量修正系数,二者的计算公式如下:
[0027][0028][0029]
其中a
j
为喷口面积,i为喷口测点数量,a为进口获流区面积。
[0030]
因此,通过所述外悬测试模块能够精确测量出喷水推进器11进口和喷口处速度分布,完成速度数据采集,并能通过计算准确的得到喷水推进器11总推力。
[0031]
如图1所示,所述信号处理模块包括测试主机1、压差传感器5和数据采集仪2,所述
压差传感器5的数量与毕托管阵列3与独立毕托管7中毕托管总数相同,所述压差传感器5的两个输入端分别与毕托管的静压端和全压端相连,用于测量毕托管的静压端和全压端的压差,并转换为流速信号;所述压差传感器5的输出端通过信号线与所述数据采集仪2相连,所述数据采集仪2与所述测试主机1相连,通过所述压差传感器5能将喷水推进器11进口和喷口的流区速度分布转换成电信号,然后经由所述数据采集仪2采集导入测试主机1,所述测试主机1还与所述测力天平9相连,从而使所述测试主机1还能实时获取所述喷水推进船模10自航状态下的强制力,通过所述测试主机1中内部程序的统一计算,进而可高效得到船体相应航速下的自航点结果。
[0032]
作为一种优选实施例,所述数据采集仪2输入端采用的是4通道或8通道。
[0033]
本发明的工作流程如下:
[0034]
试验时,所述喷水推进船模10会在喷水推进器11的推力与拖车14的牵引力的作用下运动,保持拖车14速度不变,通过调节喷水推进器11的转速,使所述喷水推进船模10与拖车14速度保持一致,从而能使所述喷水推进船模10达到对应航速下自航点,通过毕托管阵列3和独立毕托管7对喷水推进器11进口和喷口处速度分布进行多点测量,然后将试验记录到的所述喷水推进器11进口获流区速度分布和喷口速度分布以及喷水推进船模10的速度、喷水推进器11转数、拖车14对船模的强制力一并导入测试主机1,通过所述测试主机1中内部程序的统一计算,进而能得到喷水推进器11的总推力并预报喷水推进船模10的航速。
[0035]
以上实施方式仅用于说明本发明,而非对本发明的限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行各种组合、修改或者等同替换,都不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。