1.本发明涉及一种垃圾清理装置,尤其是涉及一种新型水面垃圾清理船。
背景技术:
2.随着人民生活水平的提高,我国日常生活中产生的垃圾与日俱增,大量的生活垃圾漂浮在水面上,并且我国旅游业发展如火如荼,随之景区湖面河流垃圾清理问题日渐显著。同时现有打捞力度与垃圾数量的矛盾十分突出,无法满足清理的诉求。而大部分湖面河流仅靠人工打捞漂浮垃圾,费时费工费力,效率低下,且具有较大的安全隐患。
技术实现要素:
3.针对目前我国河流、湖泊漂浮垃圾无法及时清理的问题,以及目前的水上垃圾清理技术无法满足当前清理需要,本实用新型拟定解决的技术问题是,提供一种新型智能水上垃圾清理船。
4.本实用新型解决所述问题采用的技术方案是,提供一种新型智能水上垃圾清理船,包括双船体与回转舵、垃圾清理及分类回收装置;其特征在于机器视觉处理装置、太阳能蓄电系统、单片机控制模块;
5.船体基于清理水面垃圾的需要,进行了双船体的设计,螺旋桨基于船体中轴线左右对称分布,螺旋桨驱动采用了基于电力推进的dual
‑
end crp系统,降低了机械的复杂性,船体从上到下载有太阳能蓄电池系统、基于opencv的机器视觉系统、单片机控制系统、垃圾拾取装置及垃圾储存系统以及基于电力推进的dual
‑
end crp系统。所述的太阳能蓄电池系统与蓄电池和单片机控制系统通过导线相连,基于opencv的机器视觉系统也与单片机控制系统和蓄电池通过导线相连,垃圾拾取装置与垃圾储存系统通过机械结构相连,垃圾拾取装置与蓄电池和单片机控制系统通过导线相连。
6.基于opencv的机器视觉系统通过摄像头进行对周围环境的感知,可以准确识别并躲避障碍物,大大增加垃圾清理船在无人的情况下运行的安全性,并且识别垃圾所在的位置,通过 opencv双目测距算法计算与垃圾距离进行精确回收,减少能耗。在经过基于opencv的机器视觉系统定位后,船头的垃圾拾取装置运用带有挡板的传送装置将船前的垃圾托起并回收至垃圾过滤网内,垃圾过滤网底部采用小孔的设计,在防止垃圾漏出的基础上沥干水分,进一步减小回收难度,并且本装置会根据垃圾大小的不同,运用不同的方式回收,达到初步分类的效果。船顶的太阳能电池板可在一定程度上为船体提供能量,将太阳能发电产生的能量储存至蓄电池内,增强续航能力,并且在一定程度上阻挡阳光直射,防止装置被晒老化产生故障,增强装置寿命。
7.与现有技术相比,本实用新型的有益效果是:
8.1、通过计算机视觉对周围环境的感知,及时避障,增加船体运行的安全性;识别并计算船体与垃圾的距离,做到精确回收与能源利用最大化,提高船体续航;
9.2、通过单片机智能控制系统,船体可以做到自动安全运行,自动控制驾驶方向,且
与手机端app相连,实时定位,大大减少人工成本;可以做到大小垃圾的大致分类,为后续的回收减少困难;能源的最大化利用,不会漫无目的的驾驶浪费资源;
10.3、螺旋桨采用基于电力推进的dual
‑
end crp系统,大大降低了机械的复杂性,推进功率不仅按比例分配到了两个螺旋桨,还分配到了两套独立的齿轮传动机构。前螺旋桨具有推进高、尾流平滑、低噪声、低震动的优点。且取消了舵机系统,船体的航行方向可通过改变螺旋桨的推进方向实现;
11.4、采用太阳能电池板作船体顶部,在一定程度上对船体起到保护作用,且天气晴朗时提供大量能源,储存至蓄电池中,增强垃圾清理船的续航能力。
附图说明
12.图1为本实用新型装置的俯视图;
13.图2为本实用新型装置的侧视图;
14.图3为本实用新型装置的剖视图;
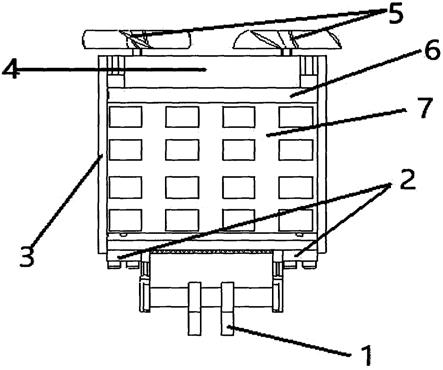
15.图4为本实用新型装置的主视图。
16.各附图标记如下:
17.1、垃圾拾取装置;2、机器视觉处理装置;3、垃圾拾取步进装置;4、船体;5、dual
‑
endcrp系统;6、可移动的升降杆;7、太阳能蓄能装置;8、单片机控制系统9、垃圾过滤网。
具体实施方式
18.本实例为一种全自动水面垃圾清理装置。为使本装置更加通俗易懂,现结合装置具体实施过程和附图来进一步阐述本装置。
19.本装置顶部为太阳能蓄能装置7,同时下方有可以移动的升降杆6,控制太阳能电池板调整合适的折射角度,吸取较多太阳能,将更多的能量储存到蓄电池中。船体前方为机器视觉处理装置2,基于opencv技术进行图像识别,对水面垃圾实现精准定位,同时可以准确识别并躲避障碍物,大大增加垃圾清理船运行的安全性,并且识别垃圾所在的位置,通过opencv 算法计算距离进行精确回收,防止因船体无法准确确定垃圾的位置而盲目运行,浪费能源。本装置的控制系统为单片机控制系统8,该控制系统既可以在识别到垃圾后控制船体前方的垃圾拾取装置1及时将垃圾收取进垃圾过滤网9内,又可以实现对船体工作时间的控制等。本装置后方为基于电力推进的dual
‑
endcrp系统5,该系统可以实现在水中自如地变换方向。
20.在船体进入水面之前可以通过控制船体底部的51单片机进行工作定时,在达到预定时间后可以停止垃圾收取工作,自主返回岸边,及时回到岸边卸载垃圾,并启动自检,保证垃圾船运行的稳定性,提升工作效率。
21.在船体进入水面之后,可以同时利用顶部的太阳能电池板和蓄电池驱动船体前进,船体顶部由太阳能电池板组成,同时下方配有升降杆,保证太阳能电池板有合适的折射角度,吸取较多太阳能,最大程度进行动力的驱动。并且保护装置不被风吹雨淋日晒,降低装置老化速度。如果遇到阴雨天气,可以使用位于船体底部的发动机结合太阳能板所贮存的太阳能同时对船体进行驱动。
22.在船体行进过程中,依靠船体前方基于opencv机器视觉系统进行图像识别,精准
识别及判断水面垃圾,通过opencv算法计算距离进行精确回收,减少能耗。此系统同时可以准确对周围环境进行感知避免船体行进过程中触碰水面其他物体或者动物,甚至可以实现在景区正常营业时进行垃圾清理。
23.船体行进过程中,发现水面垃圾后会立即发送信号至51单片机内,然后根据垃圾大小按照不同方式进行收取,若为大垃圾如衣物塑料袋废弃物等,则由51单片机控制的船体前方垃圾拾取装置进行收取后放入下方垃圾过滤网内,这样可以避免因船体移动形成的水波向前推进垃圾而导致无法回收。若为小垃圾如饮料瓶或者漂浮于水面的食物碎屑等,则船体直接向垃圾处前进,这样可以利用船体前进使小垃圾随之移动而使其自然进入下方垃圾过滤网内,垃圾过滤网底部布满小孔,在防止垃圾漏出的基础上沥干水分,减小进一步回收难度。
24.船体在水面工作时可以利用后方对称的螺旋桨自如转变方向,更好的收取垃圾。船体基于清理水面垃圾的需要,进行了双船体的设计,螺旋桨左右对称分布,采用了基于电力推进的dual
‑
end crp系统,大大降低了机械的复杂性,具有推进高、尾流平滑、低噪声、低震动的优点,使船体在水面运作更加自如。
25.船体完成垃圾清理功能或达到预定定时时间后,船体会自主按照原路进行返回至出发点进行停靠。并且船体在运行过程中使用者可以随时进行gps定位、利用摄像头得知船体的周围情况,大大降低了船体运行的危险系数,减少了垃圾清理人员的工作量。
26.以上实施例仅用以说明本实用新型的技术方案,而非对其限制,尽管参照较佳实施例对本实用新型进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,而不脱离本实用新型技术方案的精神,均在本实用新型的保护范围之内。