1.本发明涉及无人探测技术领域,特别的为一种无人船设计测量系统。
背景技术:
2.截至目前,国内外已经公布的水上无人测量船船型中,有单体船、双体船和三体船等。其中,单体船最为常见,但由于该船型的排水量及其尺度都小,对于外部的风、浪和水流的环境特别敏感,在风浪中摇荡幅度大,不利于测量任务的开展,双体船在载重量和稳定性两个方面相比单体船均有明显改观,但是目前缺乏一种双体船的测量设计系统以提高其探测效率。
3.因此,亟待设计一种无人船设计测量系统来解决上述提出的问题。
技术实现要素:
4.本发明提供的发明目的在于提供一种无人船设计测量系统,该无人船设计测量系统船体运行稳定,搭载能力强,动力强,便于操控,解决了浅水探测的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种无人船设计测量系统,包括两个无人船、连接架和搭载平台,其特征在于,两个无人船分布在搭载平台的两侧且通过连接架进行连接,所述无人船为无人驾驶船,所述搭载平台搭载测深仪、定姿系统、多波束、侧扫声呐、adcp流速流量仪和水质多参数仪传感设备,所述无人船搭载ch15动力模块,ch15动力模块采用泵喷式双动力双舵模块,直流无刷电机驱动,喷水推进,每个泵喷动力模块都配有舵向控制,在单个动力模块失效情况下也可实现前进、后退、转向等控制,所述搭载平台通过无线传输模块与控制终端通信,所述无线传输模块数据传输采用同一链路,数据存储采用双备份,确保链路中断时数据的有效存储;各传感器采集数据须以合理的格式存储于同一文件中,数据融合必须考虑数据同步性,所述控制终端遥控器可实时显示电压、速度、位置、航向、观测卫星、距离信息,所述无人船设计测量系统还包括地面控制基站。
6.优选的,所述无人船由高强度玻璃钢制成。
7.优选的,所述定姿系统采用高精度三维电子罗盘。
8.优选的,所述地面控制基站采用交互式界面,通过无线传输协议,实时接收、分析、处理和显示遥测无人船发送的数据,控制测量船自动或手动走线测量,并实现船只的自动回航,最后对采集的数据进行数据处理以及图件的绘制,同一软件内可实现:卫星影像背景、自动控制、参数设置、测深数据显示、预处理。
9.优选的,所述无人船设计测量系统搭载船控系统,所述船控系统根据系统导入的测线坐标,无人船可自动沿设定测线测量及自动进行测线切换,高精度定位方法,保证了船只在狭窄河道内的安全性和有效作业,所述船控系统控制各传感设备测量,自动测量结束后、船载电池电量不足25%或者当通讯链路中断45秒以上时,系统可自动开启自动回归功能,最终回归到事先设定的回归点上,遥控器和基站都可通过指令实现一键回航。
10.本发明提供了一种无人船设计测量系统。具备以下有益效果:
11.1、无人船采用了独特模块化双体船型设计,打造极高稳性和耐波性为声学探测设备提供了良好的工作环境。船型由两个对称片体组成,相较于同排水量单船体而言,长度系数与长宽比增加,因此低速时兴波阻力降低;较单体船而言,双体船船体由于左右分立,因而横摇回复力矩远大于单体船,故而横摇稳定性佳;优良的航行稳定性能保证测量数据的可靠,无人船双体设计的船体和设备舱提供丰富的设备搭载能力,船体平台和任务荷载双系统完全模块化,提高使用方便性、维护性,解决了近岸浅水区域难以测量的问题,无人船吃水浅,相比有人艇能到达更浅的、水下环境复杂的作业区域,有效的解决了近岸浅水区域难以测量的问题,双体船有足够的空间,采用模块化设计,在保证安全可靠的前提下,最大限度方便设备布置与拆装,ch15动力模块采用泵喷式双动力双舵模块。泵喷式设计吃水浅、防缠绕能力更强。双动力给船只在搭载大型多波束时提供了了足够的动力。每个泵喷动力模块都配有舵向控制,在单个动力模块失效情况下也可实现前进、后退、转向等控制。
附图说明
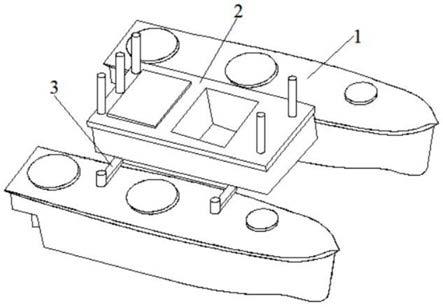
12.图1为本发明结构示意图。
13.图中:1无人船、2连接架、3搭载平台。
具体实施方式
14.下面,结合附图以及具体实施方式,对本发明做出进一步的描述:
15.如图1所示,一种无人船设计测量系统,包括两个无人船1、连接架2和搭载平台3,两个无人船1分布在搭载平台3的两侧且通过连接架2进行连接,无人船1为无人驾驶船,搭载平台搭载测深仪、定姿系统、多波束、侧扫声呐、adcp流速流量仪和水质多参数仪传感设备,无人船搭载ch15动力模块,ch15动力模块采用泵喷式双动力双舵模块,直流无刷电机驱动,喷水推进,每个泵喷动力模块都配有舵向控制,在单个动力模块失效情况下也可实现前进、后退、转向等控制,搭载平台通过无线传输模块与控制终端通信,无线传输模块数据传输采用同一链路,数据存储采用双备份,确保链路中断时数据的有效存储;各传感器采集数据须以合理的格式存储于同一文件中,数据融合必须考虑数据同步性,控制终端遥控器可实时显示电压、速度、位置、航向、观测卫星、距离信息,无人船设计测量系统还包括地面控制基站。
16.无人船由高强度玻璃钢制成。
17.定姿系统采用高精度三维电子罗盘。
18.地面控制基站采用交互式界面,通过无线传输协议,实时接收、分析、处理和显示遥测无人船发送的数据,控制测量船自动或手动走线测量,并实现船只的自动回航,最后对采集的数据进行数据处理以及图件的绘制,同一软件内可实现:卫星影像背景、自动控制、参数设置、测深数据显示、预处理。
19.无人船设计测量系统搭载船控系统,船控系统根据系统导入的测线坐标,无人船可自动沿设定测线测量及自动进行测线切换,高精度定位方法,保证了船只在狭窄河道内的安全性和有效作业,船控系统控制各传感设备测量,自动测量结束后、船载电池电量不足25%或者当通讯链路中断45秒以上时,系统可自动开启自动回归功能,最终回归到事先设定的回归点上,遥控器和基站都可通过指令实现一键回航。
20.无人船采用了纯电推双体设计,相比柴油动力有人艇,省去了租船的费用;同时也为声学探测设备提供了良好的工作环境。
21.无人船采用了独特模块化双体船型设计,打造极高稳性和耐波性为声学探测设备提供了良好的工作环境。船型由两个对称片体组成,相较于同排水量单船体而言,长度系数与长宽比增加,因此低速时兴波阻力降低;较单体船而言,双体船船体由于左右分立,因而横摇回复力矩远大于单体船,故而横摇稳定性佳;优良的航行稳定性能保证测量数据的可靠,无人船双体设计的船体和设备舱提供丰富的设备搭载能力,船体平台和任务荷载双系统完全模块化,提高使用方便性、维护性,解决了近岸浅水区域难以测量的问题,无人船吃水浅,相比有人艇能到达更浅的、水下环境复杂的作业区域,有效的解决了近岸浅水区域难以测量的问题,双体船有足够的空间,采用模块化设计,在保证安全可靠的前提下,最大限度方便设备布置与拆装,ch15动力模块采用泵喷式双动力双舵模块。泵喷式设计吃水浅、防缠绕能力更强。双动力给船只在搭载大型多波束时提供了了足够的动力。每个泵喷动力模块都配有舵向控制,在单个动力模块失效情况下也可实现前进、后退、转向等控制。
22.最后应说明的是:以上仅为本发明的优选实施例而已,并不用于限定本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。