1.本实用新型涉及破冰技术领域,具体涉及一种用于破冰船的高压水射流破冰装置。
背景技术:
2.破冰船是用于破碎水面冰层,开辟航道,保障舰船进出冰封港口或引导舰船在冰区航行的重要交通工具。现有破冰船的破冰方式一般是船艏与冰层撞击,这种破冰方式需要强大的推进力和坚硬的船艏,船艏与冰层撞击会产生巨大的振动和噪声,这也很可能使得船体破裂而进水,航行风险较大;少部分破冰船是在船艏安装一个铰碎装置,利用铰碎装置破坏冰层来开辟航道,这也需要强大的推进力,铰碎装置与冰层直接接触也会使得船体产生大的振动。因此,有必要提供一种结构简单、破冰性能高且不与冰层直接接触的破冰装置。
技术实现要素:
3.为了解决现有技术的不足,本实用新型提供了一种用于破冰船的高压水射流破冰装置,解决了传统破冰方式会使船体产生较大振动的问题。
4.为达上述目的,本实用新型提供基础方案是:一种用于破冰船的高压水射流破冰装置,包括船体和控制器,所述控制器设于所述船体的控制室内,所述船体前端连接有基座,所述基座内设有高压水泵,所述基座连接有机械臂,所述机械臂的自由端连接有桁架,所述桁架连接有电机和两个第一喷射切割头,两个所述第一喷射切割头关于所述桁架对称设置,所述电机设于所述桁架的内侧,所述电机的输出端连接有丝杆,所述丝杆的自由端与所述桁架转动连接,所述丝杆螺纹连接有滑块,所述滑块的一侧与所述桁架表面抵接,所述滑块与所述丝杆共同组成滚珠丝杆副结构,所述桁架对称设有两个距离传感器,两个所述距离传感器均设于靠近所述滑块的一侧,所述距离传感器均通过导线与所述电机连通,所述滑块表面连接有第二喷射切割头,所述第一喷射切割头与所述第二喷射切割头均连通有高压管路,所述高压管路的自由端均与所述高压水泵连通,所述机械臂、所述高压水泵和所述电机均与所述控制器通过导线连接。
5.方案的原理及效果:船体前进破冰时,机械臂转动并将各个喷射切割头朝向冰层,高压水泵将船体内的冷却水加压之后通过高压管路输送至第一喷射切割头和第二喷射切割头,两个第一喷射切割头与第二喷射切割头分别对冰层进行高压水切割,第二喷射切割头与滑块连接,滑块与丝杆螺纹连接,且桁架靠近滑块的一侧均连接有距离传感器,电机转动带动丝杆转动,第二喷射切割头在丝杆上做左右往返运动;并且第二喷射切割头做左右往返运动的同时,船体做直线运动,第二喷喷射头在两个第一喷射切割头之间做“z”字型往返运动,将两个第一喷射切割头切碎的冰层切成小块并脱落,实现破冰;可以通过控制器,调节与机械臂自由端连接的桁架位置,提高各个喷射切割头的角度,提高破冰效率。
6.进一步,所述桁架外表面连接有超声波发射器,所述超声波发射器与所述控制器
通过导线连接。
7.采用上述方案,可以通过超声波发射器探测冰层厚度、各个喷射切割头与冰面之间的距离,并将数据传递给控制器。
8.进一步,所述机械臂设有多个转动关节,所述机械臂的自由端与所述桁架转动连接。
9.采用上述方案,能够实现多角度调节桁架的位置,从而调节各个喷射切割头的位置,提高破冰效率。
10.进一步,两个所述第一喷射切割头之间的距离大于所述船体的宽度,所述丝杆的长度大于两个所述第一喷射切割头之间的距离。
11.采用上述技术方案,保障船体行进路线的冰块都被切碎,并且可以使被切割的冰块脱离冰层主体,实现快速破冰。
12.进一步,所述机械臂、所述高压管路、所述第一喷射切割头和所述第二喷射切割头的外表面均连接有电加热套。
13.采用上述技术方案,防止各个部件被冻结,并影响正常工作。
14.与现有技术相比,本实用新型的有益效果是:本装置结构简单,安装方便;破冰时不与冰层直接接触,提高了冰区航行时的安全性;相对于传统破冰方式,本装置产生的振动和噪声大大减少。
附图说明
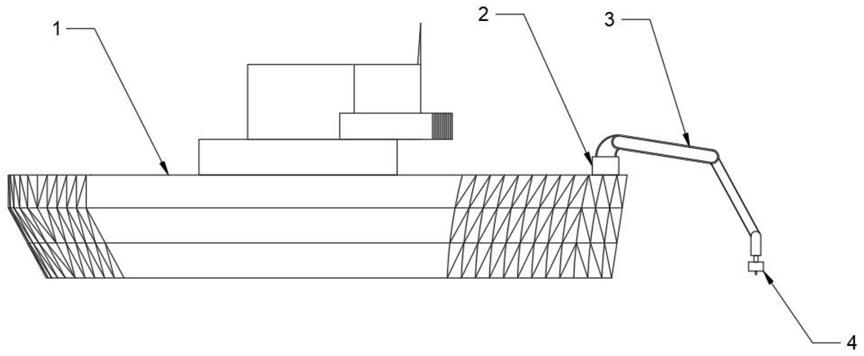
15.图1为本实用新型一种用于破冰船的高压水射流破冰装置结构示意图;
16.图2为本实用新型一种用于破冰船的高压水射流破冰装置俯视图;
17.图3为本实用新型桁架结构示意图;
18.图4为本实用新型喷射切割头运动轨迹示意图。
具体实施方式
19.下面通过具体实施方式进一步详细的说明:
20.说明书附图中的附图标记包括:1船体、2基座、3机械臂、4桁架、5电机、6第一喷射切割头、7丝杆、8滑块、9距离传感器、10第二喷射切割头、11高压管路、12超声波发射器。
21.实施例:
22.如图1和图2所示,一种用于破冰船的高压水射流破冰装置,包括船体1和控制器,控制器设于船体1的控制室内,船体1的右侧甲板上固定连接有基座2,基座2的内部安装有高压水泵,高压水泵的输入端与船体1内的冷却水连通,基座2的顶端固定连接有机械臂3,机械臂3的右侧自由端转动连接有桁架4,机械臂3设有多个转动关节,可以多角度调节桁架4的位置,并且可以将桁架4进行旋转;
23.如图3所示,桁架4的右侧呈“u”形凹槽,凹槽内的两对立侧壁之间转动连接有丝杆7,丝杆7的上端连接有电机5,电机5设于桁架4的内侧,丝杆7螺纹连接有滑块8,滑块8的左侧表面与桁架4表面抵接,滑块8的表面固定连接有第二喷射切割头10,凹槽内还固定连接有两个第一喷射切割头6和超声波发射器12,超声波发射器12与桁架4表面固定连接,两个第一喷射切割头6关于桁架4对称设置,且两个第一喷射切割头6之间的距离大于船体1的宽
度,丝杆7的长度大于两个第一喷射切割头6之间的距离,第一喷射切割头6与第二喷射切割头10的切割方向均朝向右侧,且第一喷射切割头6与第二喷射切割头10的左侧均连通有高压管路11,高压管路11的自由端均与高压水泵的出水端连通,桁架4还连接有控制器和两个距离传感器9,控制器设于桁架4的内侧,两个距离传感器9分别设于凹槽的两对立面,且滑块8在距离传感器9的检测范围内,高压水泵、电机5、第一喷射切割头6和第二喷射切割头10均通过导线与控制器连通,机械臂3、高压管路11、第一喷射切割头6和第二喷射切割头10的外表面均连接有电加热套,且机械臂3、高压水泵、电机5和超声波发射器12均与控制器通过导线连接;
24.如图4所示,船体1匀速直线运动时,两个第一喷射切割头6分别沿直线切割冰块,第二喷射切割头10在两个第一喷射切割头6之间做往返运动,运行轨迹呈“z”字形排列,且第二喷射切割头10的往返切割长度大于两个第二喷射切割头10之间的距离,第二喷射切割头10做一次往返运动之间的竖直距离为l,距离l与电机5转速呈反比。
25.具体实施过程如下:
26.破冰船工作时,机械臂3带动桁架4移动,并将第一喷射切割头6和第二喷射切割头10朝向冰层进行切割,超声波发射器12可以用来测量各个喷射切割头与冰面之间的距离以及冰层的厚度,并将收集的信息传递给控制器,控制器根据冰层厚度自动调节高压水泵的供给压力;当冰层较薄时供给压力较低,冰层变厚时供给压力逐渐增大;并且在调整高压水泵供给压力的同时,控制器也会根据冰层厚度来调节电机5的转速,以此来调节第二喷射切割头10的运动速度,并且l与电机5的转速呈反比,实现自动化和智能化破冰,提高了破冰的工作效率。
27.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。