1.本实用新型涉及智能手表技术领域,具体涉及一种不随手腕转动的智能手表。
背景技术:
2.现有的智能手表产品,表带与手表主体建立物理连接,因此手表会随着手腕转动,仅能够满足用户的日常需求;此种智能手表的与表带之间是紧密连接的,用户只能通过翻转手腕才能看到手表主体,如果某些情况下,比如手上拿着水杯的时候,用户需要看手表主体,则不能转动手腕实现,那就会出现导致看不到导致体验不佳。因此,现有的智能穿戴设备,不太能够很好地同时满足手上拿着东西不方便转动的时候,需要看时间等基础功能的需求。
技术实现要素:
3.针对现有技术的不足,本实用新型旨在提供一种不随手腕转动的智能手表,可改善上述现有智能手表的缺陷。
4.本实用新型采用如下技术方案:
5.一种不随手腕转动的智能手表,包括表带、手表主体和滑动模块,所述滑动模块的一端连接所述表带,另一端连接所述手表主体,所述手表主体内部设有控制模块和三轴加速度传感器,所述滑动模块连接控制模块,所述三轴加速度传感器通讯连接所述控制模块,所述三轴加速度传感器用于检测用户手腕旋转倾角度数据并传输至所述控制模块;当手腕转动时,所述控制模块控制所述滑动模块带动所述手表主体朝手腕转动的反方向相对所述表带滑动。
6.进一步地,所述表带的两侧边沿设有滑轨,所述滑动模块与所述滑轨并可带动所述手表主体沿所述表带延伸方向滑动。
7.进一步地,所述滑动模块包括驱动滑轮和微型马达,所述微型马达设于所述手表主体并通讯连接于所述控制模块,所述驱动滑轮成对设置并位于所述表带两侧的滑轨,所述微型马达的输出轴同轴连接于其中一个驱动滑轮。
8.进一步地,所述手表主体的两侧设有第一压力传感器,所述第一压力传感器连接所述控制模块,所述第一压力传感器用于检测手掌上扬的手势,使所述滑动模块带动所述手表主体作出对应的转动。
9.进一步地,所述表带的侧边设有第二压力传感器,所述第二压力传感器连接所述控制模块,所述第二压力传感器用于检测手掌下压的手势,使所述滑动模块带动所述手表主体作出对应的转动。
10.进一步地,所述表带为呈首尾相连的完整圆环。
11.本实用新型的有益效果在于:本实用新型可通过设置可转动的手表主体,使用户在不需要转动手腕的情况下,手表显示时间的一面保持可面向用户,用户无需转动手腕也能看到手表主体,提高舒适的使用体验。
附图说明
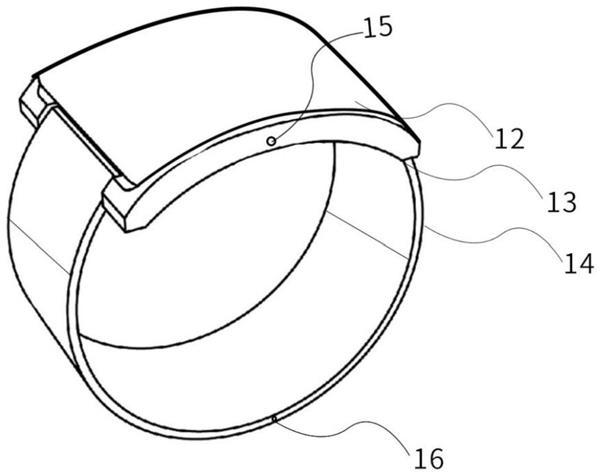
12.图1为本实用新型的整体示意图;
13.图2为本实用新型的侧面示意图一;
14.图3为本实用新型的侧面示意图二;
15.图4为本实施例中滑动模块与滑轨的连接示意图。
具体实施方式
16.以下将结合附图对本实用新型作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围并不限于本实施例。
17.如图1至图4所示,本实施例提供一种不随手腕转动的智能手表,包括表带14、手表主体12和滑动模块13,所述滑动模块13的一端连接所述表带14,另一端连接所述手表主体12,所述手表主体12内部设有控制模块和三轴加速度传感器,所述滑动模块13连接控制模块,所述三轴加速度传感器通讯连接所述控制模块,所述三轴加速度传感器用于检测用户手腕旋转倾角度数据并传输至所述控制模块;当手腕转动时,所述控制模块控制所述滑动模块带动所述手表主体12朝手腕转动的反方向相对所述表带14滑动。
18.进一步地,所述表带14的两侧边沿设有滑轨141,所述滑动模块12与所述滑轨141滑动连接并可带动所述手表主体12沿所述表带14延伸方向滑动。
19.更进一步地,所述滑动模块13包括驱动滑轮131和微型马达,所述微型马达设于所述手表主体12并通讯连接于所述控制模块,所述驱动滑轮131成对设置并位于所述表带两侧的滑轨141,所述微型马达的输出轴同轴连接于其中一个驱动滑轮131。
20.进一步地,所述表带14为呈首尾相连的完整圆环。
21.具体地,所述微型马达接收控制模块的信号并根据信号转动相应转数带动控制滑轮滑行一定距离;在本实施例中,所述控制模块设置有自动跟随滑动模式,通过所述三轴加速度传感器检测用户手腕的旋转倾斜角度,并输出至控制模块,控制模块根据用户手腕的旋转倾斜角度计算出纠正转动的角度数据,并传递至微型马达,微型马达根据角度数据转动,控制驱动滑轮反方向滑动相应距离,如用户逆时针翻转手腕,则所述滑轮顺时针带动手表主体沿表带滑动,使手表主体的正面相对用户视觉固定。
22.本实施例中,所述手表主体12的两侧设有第一压力传感器15,所述第一压力传感器15连接所述控制模块,所述第一压力传感器15用于检测手掌上扬的手势,使所述滑动模块13带动所述手表主体12向用户一侧方向的滑动。
23.进一步地,所述表带14的侧边设有第二压力传感器16,所述第二压力传感器16连接所述控制模块,所述第二压力传感器16用于检测手掌下压的手势,使所述滑动模块13带动所述手表主体12向用户一侧方向的滑动。
24.具体地,所述控制模块还设有手动控制模式,用户预先在控制模块设定第一旋转角度和第二旋转角度;当手掌上扬时,第一压力传感器感检测压力值并输出至控制模块,所述控制模块判断检测的压力值是否大于预设阈值,判断大于预设阈值后,根据设定的第一旋转角度控制滑动模块带动手表主体向用户一侧方向滑动相应距离;当手掌下压时,第二压力传感器感检测压力值并输出至控制模块,所述控制模块判断检测的压力值是否大于预
设阈值,判断大于预设阈值后,根据设定的第二旋转角度控制滑动模块带动手表主体向用户一侧方向滑动相应距离。
25.上述不随手腕转动的智能手表的工作原理为:
26.用户在手表主体设置自动跟随滑动模式和手动控制模式的开启和关闭;开启自动跟随滑动模式后,所述三轴加速度传感器持续检测用户手腕的旋转倾斜角度,用户佩戴智能手表时,手部活动、旋转触发三轴加速度传感器检测出旋转倾斜角度,通过控制模块根据上述旋转倾斜角度计算滑动模块需要反向旋转的角度数据,并传递反向旋转的角度至驱动滑轮的微型马达,微型马达根据角度数据转动,控制滑轮向手部转动的反方向滑动相应距离,从而保持手表主体相对用户视觉固定;开启手动控制模式,第一压力传感器和第二压力传感器分别检测手掌上扬和手掌下压的姿态,滑动模块根据控制模块预设的第一旋转角度和第二旋转角度分别在手掌上扬和手掌下压的情况下向用户一侧方向滑动相应距离,使用户无需转动手腕也能看到手表主体的正面。
27.对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变和变形,而所有的这些改变和变形,都应该包括在本实用新型权利要求的保护范围之内。
技术特征:
1.一种不随手腕转动的智能手表,包括表带(14)和手表主体(12),其特征在于,还包括滑动模块(13),所述滑动模块(13)的一端连接所述表带(14),另一端连接所述手表主体(12),所述手表主体(12)内部设有控制模块和三轴加速度传感器,所述滑动模块(13)连接控制模块,所述三轴加速度传感器通讯连接所述控制模块,所述三轴加速度传感器用于检测用户手腕旋转倾角度数据并传输至所述控制模块;当手腕转动时,所述控制模块控制所述滑动模块(13)带动所述手表主体(12)朝手腕转动的反方向相对所述表带(14)滑动。2.根据权利要求1所述的不随手腕转动的智能手表,其特征在于,所述表带(14)的两侧边沿设有滑轨(141),所述滑动模块(13)与所述滑轨(141)并可带动所述手表主体(12)沿所述表带(14)延伸方向滑动。3.根据权利要求2所述的不随手腕转动的智能手表,其特征在于,所述滑动模块(13)包括驱动滑轮(131)和微型马达,所述微型马达设于所述手表主体(12)并通讯连接于所述控制模块,所述驱动滑轮(131)成对设置并位于所述表带两侧的滑轨(141),所述微型马达的输出轴同轴连接于其中一个驱动滑轮(131)。4.根据权利要求1所述的不随手腕转动的智能手表,其特征在于,所述手表主体(12)的两侧设有第一压力传感器(15),所述第一压力传感器(15)连接所述控制模块,所述第一压力传感器(15)用于检测手掌上扬的手势,使所述滑动模块(13)带动所述手表主体(12)作出对应的转动。5.根据权利要求4所述的不随手腕转动的智能手表,其特征在于,所述表带(14)的侧边设有第二压力传感器(16),所述第二压力传感器(16)连接所述控制模块,所述第二压力传感器(16)用于检测手掌下压的手势,使所述滑动模块(13)带动所述手表主体(12)作出对应的转动。6.根据权利要求5所述的不随手腕转动的智能手表,其特征在于,所述表带(14)为呈首尾相连的完整圆环。
技术总结
本实用新型公开了一种不随手腕转动的智能手表,包括表带、手表主体和滑动模块,所述滑动模块的一端连接所述表带,另一端连接所述手表主体,所述手表主体内部设有控制模块和三轴加速度传感器,所述滑动模块连接控制模块,所述三轴加速度传感器通讯连接所述控制模块,所述三轴加速度传感器用于检测用户手腕旋转倾角度数据并传输至所述控制模块;当手腕转动时,所述控制模块控制所述滑动模块带动所述手表主体朝手腕转动的反方向相对所述表带滑动。本实用新型可通过设置可滑动位置的手表主体,使用户在不需要转动手腕的情况下,手表显示时间的一面可保持面向用户,用户无需转动手腕也能看到手表主体,提高舒适的使用体验。提高舒适的使用体验。提高舒适的使用体验。
技术研发人员:黄伟健
受保护的技术使用者:读书郎教育科技有限公司
技术研发日:2021.07.20
技术公布日:2022/1/28