1.本实用新型涉及实训装置领域,具体是一种智能工业机器人工业自动化综合实训装置。
背景技术:
2.随着科技的发展,工业机器人已经渗透至各个领域,其应用极其广泛,企业对能够完成工业机器人编程、操作、维修的应用型技术人才需求迫切。工业机器人技术应用教学工作日益显得重要,当前国内工业机器人技术应用教学还处于一个普及阶段,教学仪器领域中缺乏针对工业机器人实践教学的专用装置。目前已有的相关教学实验平台布局单一、程序固化、不能通用、不能自主开发且价格昂贵。如果去工厂进行实地学习又不现实,一般工厂只同意一般性参观,因此提出一种智能工业机器人工业自动化综合实训装置。
技术实现要素:
3.本实用新型要解决的技术问题就是克服以上的技术缺陷,提供一种方便操作、能够方便调整装置的位置、能够全自动的进行操作的智能工业机器人工业自动化综合实训装置。
4.为了解决上述问题,本实用新型的技术方案为:一种智能工业机器人工业自动化综合实训装置,包括支撑板,所述支撑板的顶端设有箱体,所述箱体的内部设有触摸屏,所述触摸屏的右端设有驱动器,所述驱动器的右端设有配线盘,所述触摸屏的底端设有变频器,所述变频器的右端设有控制器,所述控制器的右端设有电气组,所述箱体的底端两端设有支撑柱,所述支撑柱的顶端设有承载板,所述承载板的顶端中央设有电脑,所述承载板的左端设有操控盒,所述操控盒的顶端设有机械力臂,所述机械力臂的底端设有夹紧装置,所述支撑板的底端设有升降支撑杆,所述升降支撑杆的底端连接设有电推杆一,所述升降支撑杆的底端设有底座,所述箱体的外部右端设有控制操控台。
5.进一步,所述机械力臂上设有支撑杆,所述支撑杆的端部设有电推杆二,所述电推杆二的另一端设有连接杆,所述连接杆上连接设有连接块,所述连接块上设有夹紧收缩室,所述夹紧收缩室的两端设有夹子。
6.进一步,所述夹紧装置上设有固定板,所述固定板上设有固定块,两个所述固定块中端设有连接杆,所述连接杆上设有套筒,所述套筒上设有螺栓。
7.进一步,所述底座的两端设有车轮,所述底座上设有固定杆。
8.进一步,所述箱体的左端设有储存室。
9.本实用新型与现有的技术相比的优点在于:本实用新型能够多需要操作的机器零件进行夹紧,能够配合电气使用来操控,本实用新型上触摸屏和驱动器,能够全自动的进行操作,本实用新型上设有电脑,能够对试验做出的结果进行记录,本实用新型方便操作、能够方便调整装置的位置、能够全自动的进行操作。
附图说明
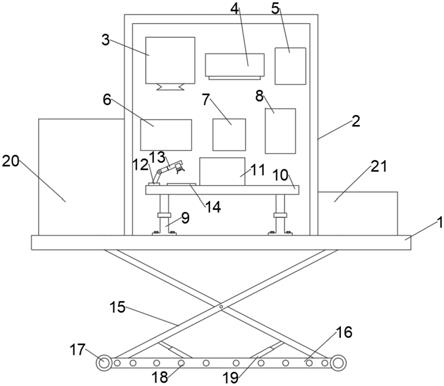
10.图1是本实用新型的结构图。
11.图2是本实用新型的机械力臂的放大图。
12.图3是本实用新型的夹紧装置的结构图。
13.如图所示:1、支撑板,2、箱体,3、触摸屏,4、驱动器,5、配线盘,6、变频器,7、控制器,8、电气组,9、支撑柱,10、承载板,11、电脑,12、控制盒,13、机械力臂,13.1、支撑杆,13.2、电推杆二,13.3、连接杆,13.4、连接块,13.5、夹紧收缩室,13.6、夹子, 14、夹紧装置,14.1、固定板,14.2、固定块,14.3、连接杆,14.4、套筒,14.5、螺栓, 15、升降支撑杆,16、底座,17、车轮,18、固定杆,19、电推杆一,20、储存室,21、控制操控台。
具体实施方式
14.下面结合附图来进一步说明本实用新型的具体实施方式。其中相同的零部件用相同的附图标记表示。
15.需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
16.为了使本实用新型的内容更容易被清楚地理解,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
17.如图1至图3所示,一种智能工业机器人工业自动化综合实训装置,包括支撑板1,所述支撑板1的顶端设有箱体2,所述箱体2的内部设有触摸屏3,所述触摸屏3的右端设有驱动器4,所述驱动器4的右端设有配线盘5,所述触摸屏3的底端设有变频器6,所述变频器 6的右端设有控制器7,所述控制器7的右端设有电气组8,所述箱体2的底端两端设有支撑柱9,所述支撑柱9的顶端设有承载板10,所述承载板10的顶端中央设有电脑11,所述承载板10的左端设有操控盒12,所述操控盒12的顶端设有机械力臂13,所述机械力臂13的底端设有夹紧装置14,所述支撑板1的底端设有升降支撑杆15,所述升降支撑杆15的底端连接设有电推杆一19,所述升降支撑杆15的底端设有底座16,所述箱体2的外部右端设有控制操控台21。
18.所述机械力臂13上设有支撑杆13.1,所述支撑杆13.1的端部设有电推杆二13.2,所述电推杆二13.2的另一端设有连接杆13.3,所述连接杆13.3上连接设有连接块13.4,所述连接块13.4上设有夹紧收缩室13.5,所述夹紧收缩室13.5的两端设有夹子13.6,机械力臂 13能够对需要的零件进行搬移,能够全自动的进行操作。
19.所述夹紧装置14上设有固定板14.1,所述固定板14.1上设有固定块14.2,两个所述固定块14.2中端设有连接杆14.3,所述连接杆14.3上设有套筒14.4,所述套筒14.4上设有螺栓14.5,此设计可以对需要需要操作的零件进行夹紧,可以防止在操作的时候脱落。
20.所述底座16的两端设有车轮17,所述底座16上设有固定杆18,此设计可以方便移动整个装置,不需要人工来进行搬运。
21.所述箱体2的左端设有储存室20,此设计可以储存零件,可以更加方便的拿到零件。
22.在具体的使用中,先打开整个装置,然后把零件从储存室20里面拿出来,然后把零件用夹紧装置14进行夹紧,打开机械力臂13进行操作,用电脑11来记录整个过程,然后从配
线盘5里面拿出来连接线,连接到需要操作的零件上面,然后调节变频器6,进行观测数据即可。
23.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种智能工业机器人工业自动化综合实训装置,包括支撑板(1),其特征在于:所述支撑板(1)的顶端设有箱体(2),所述箱体(2)的内部设有触摸屏(3),所述触摸屏(3)的右端设有驱动器(4),所述驱动器(4)的右端设有配线盘(5),所述触摸屏(3)的底端设有变频器(6),所述变频器(6)的右端设有控制器(7),所述控制器(7)的右端设有电气组(8),所述箱体(2)的底端两端设有支撑柱(9),所述支撑柱(9)的顶端设有承载板(10),所述承载板(10)的顶端中央设有电脑(11),所述承载板(10)的左端设有操控盒(12),所述操控盒(12)的顶端设有机械力臂(13),所述机械力臂(13)的底端设有夹紧装置(14),所述支撑板(1)的底端设有升降支撑杆(15),所述升降支撑杆(15)的底端连接设有电推杆一(19),所述升降支撑杆(15)的底端设有底座(16),所述箱体(2)的外部右端设有控制操控台(21)。2.根据权利要求1所述的一种智能工业机器人工业自动化综合实训装置,其特征在于:所述机械力臂(13)上设有支撑杆(13.1),所述支撑杆(13.1)的端部设有电推杆二(13.2),所述电推杆二(13.2)的另一端设有连接杆(13.3),所述连接杆(13.3)上连接设有连接块(13.4),所述连接块(13.4)上设有夹紧收缩室(13.5),所述夹紧收缩室(13.5)的两端设有夹子(13.6)。3.根据权利要求1所述的一种智能工业机器人工业自动化综合实训装置,其特征在于:所述夹紧装置(14)上设有固定板(14.1),所述固定板(14.1)上设有固定块(14.2),两个所述固定块(14.2)中端设有连接杆(14.3),所述连接杆(14.3)上设有套筒(14.4),所述套筒(14.4)上设有螺栓(14.5)。4.根据权利要求1所述的一种智能工业机器人工业自动化综合实训装置,其特征在于:所述底座(16)的两端设有车轮(17),所述底座(16)上设有固定杆(18)。5.根据权利要求1所述的一种智能工业机器人工业自动化综合实训装置,其特征在于:所述箱体(2)的左端设有储存室(20)。
技术总结
本实用新型公开了一种智能工业机器人工业自动化综合实训装置,包括支撑板,支撑板的顶端设有箱体,箱体的内部设有触摸屏,触摸屏的右端设有驱动器,驱动器的右端设有配线盘,触摸屏的底端设有变频器,承载板的顶端中央设有电脑,承载板的左端设有操控盒,操控盒的顶端设有机械力臂,机械力臂的底端设有夹紧装置,支撑板的底端设有升降支撑杆,升降支撑杆的底端连接设有电推杆一,升降支撑杆的底端设有底座,箱体的外部右端设有控制操控台。本实用新型与现有的技术相比的优点在于:本实用新型方便操作、能够方便调整装置的位置、能够全自动的进行操作。自动的进行操作。自动的进行操作。
技术研发人员:范鲁娜 董晶晶 朱琪珂 许新忠 谷广杰 谌勇涛 陈晨 张晶晶
受保护的技术使用者:河南汇邦智能装备有限公司
技术研发日:2021.04.27
技术公布日:2022/2/8