1.本发明涉及一种立体物印刷装置以及立体物印刷方法。
背景技术:
2.已知一种通过喷墨方式而在立体物的表面上实施印刷的立体物印刷装置。例如,专利文献1所记载的装置具有多关节型的机械臂、和被安装在机械臂的手部处的印刷头。在专利文献1中,对四棱柱状的工件的四个侧面中的、相邻接的两个侧面连续地实施印刷。在此,印刷头的油墨喷出面被保持为与工件的侧面平行地对置的状态。
3.在专利文献1所记载的装置中,存在如下的课题,即,由于油墨喷出面始终相对于成为工件的印刷对象的侧面而平行,因此在对由工件的相邻的两个侧面所形成的角的附近进行印刷时,即使只想在该两个侧面中的一方的侧面上进行印刷,也会导致油墨附着在另一方的侧面上。
4.专利文献1:日本特开2017-71173号公报
技术实现要素:
5.为了解决以上的课题,本发明所涉及的立体物印刷装置的一个方式具有:液体喷出头,其具有设置有喷出液体的多个喷嘴的喷嘴面;移动机构,其使所述液体喷出头相对于立体工件的相对位置以及姿态发生变化,所述工件具有第一面、和在与所述第一面之间形成屈曲或弯曲成凸状的角的第二面,在将沿着对所述第一面实施印刷的第一印刷动作中的所述液体喷出头相对于所述工件的扫描方向的轴设为第一扫描轴、并将所述第一印刷动作中的所述喷嘴面的法线矢量设为第一喷出矢量时,所述第一喷出矢量具有沿着所述第一扫描轴而朝向所述第二面的方向的成分。
6.本发明所涉及的立体物印刷装置的另一个方式具有:液体喷出头,其具有设置有喷出液体的多个喷嘴的喷嘴面;移动机构,其使所述液体喷出头相对于立体工件的相对位置以及姿态发生变化,所述喷嘴面具有由被排列的多个喷嘴构成的喷嘴列、与所述多个喷嘴的排列方向交叉的方向上的第一端、以及与所述第一端为相反侧的第二端,所述工件具有第一面、和在与所述第一面之间形成屈曲或弯曲成凸状的角的第二面,所述立体物印刷装置执行第一印刷动作,所述第一印刷动作为,以使所述第一端与所述第一面之间的距离大于所述第二端与所述第一面之间的距离、且所述第一端与所述第二面之间的距离小于所述第二端与所述第二面之间的距离的方式,而在使所述喷嘴面相对于所述第一面而倾斜的状态下对所述第一面实施印刷的动作。
7.本发明所涉及的立体物印刷装置的另一个方式具有:液体喷出头,其具有设置有喷出液体的多个喷嘴的喷嘴面;移动机构,其使所述液体喷出头相对于立体工件的相对位置以及姿态发生变化,所述喷嘴面具有由被排列的多个喷嘴构成的喷嘴列、与所述多个喷嘴的排列方向交叉的方向上的第一端、以及与所述第一端为相反侧的第二端,所述工件具有第一面、和在与所述第一面之间形成屈曲或弯曲成凸状的角的第二面,在将沿着对所述
第一面实施印刷的第一印刷动作中的所述液体喷出头相对于所述工件的扫描方向的轴设为第一扫描轴、并将所述第一印刷动作中的所述喷嘴面的法线方向设为第一喷出方向时,在所述第一印刷动作中,所述第一扫描轴与所述第一喷出方向所成的角度为锐角,且使液体喷落在与沿着所述第一扫描轴的方向上的所述多个喷嘴的位置相比更接近于所述角的位置处。
8.本发明所涉及的立体物印刷方法的一个方式为,使用具有设置有喷出液体的多个喷嘴的喷嘴面的液体喷出头来对立体工件实施印刷的立体印刷方法,在所述立体物印刷方法中,所述工件具有第一面、和在与所述第一面之间形成屈曲或弯曲成凸状的角的第二面,在将沿着对所述第一面实施印刷的第一印刷动作中的所述液体喷出头相对于所述工件的扫描方向的轴设为第一扫描轴、并将所述第一印刷动作中的所述喷嘴面的法线矢量设为第一喷出矢量时,所述第一喷出矢量具有沿着所述第一扫描轴而朝向所述第二面的方向的成分。
附图说明
9.图1为表示第一实施方式所涉及的立体物印刷装置的概要的立体图。
10.图2为表示第一实施方式所涉及的立体物印刷装置的电气结构的框图。
11.图3为表示第一实施方式中的液体喷出头单元的简要结构的立体图。
12.图4为表示第一实施方式中的液体喷出头的结构例的剖视图。
13.图5为表示第一实施方式中的压力调节阀的结构例的俯视图。
14.图6为图5中的a-a线剖视图。
15.图7为用于对第一实施方式中的第一印刷动作进行说明的图。
16.图8为用于对第一实施方式中的第二印刷动作进行说明的图。
17.图9为用于对第二实施方式中的第一印刷动作进行说明的图。
18.图10为用于对第二实施方式中的第二印刷动作进行说明的图。
19.图11为用于对第三实施方式中的第三印刷动作进行说明的图。
20.图12为用于对变形例1中的第一印刷动作进行说明的图。
21.图13为用于对变形例1中的第二印刷动作进行说明的图。
具体实施方式
22.以下,在参照附图的同时对本发明所涉及的优选的实施方式进行说明。另外,在各附图中,各部分的尺寸或比例尺与实际情况适当地有所不同,并且还具有为了易于理解而示意性地示出的部分。此外,在以下的说明中,只要没有特别对本发明进行限定的记载,则本发明的范围并不限于这些方式。
23.以下的说明适当地使用相互交叉的x轴、y轴以及z轴来进行。此外,将沿着x轴的一个方向称为x1方向,并将与x1方向相反的方向称为x2方向。同样地,将沿着y轴而彼此相反的方向称为y1方向以及y2方向。此外,将沿着z轴而彼此相反的方向称为z1方向以及z2方向。
24.在此,x轴、y轴以及z轴为,被设定在设置有后文叙述的工件w以及基台210的空间内的基座坐标系的坐标轴。典型而言,z轴为铅直的轴,且z2方向相当于铅直方向中的下方
向。另外,z轴也可以不为铅直的轴。此外,虽然x轴、y轴以及z轴典型而言为相互正交,但是并不限定于此,也存在不正交的情况。例如,x轴、y轴以及z轴只需以80
°
以上且100
°
以下的范围内的角度而相互交叉即可。
25.1.第一实施方式
26.1-1.立体物印刷装置的概要
27.图1为表示第一实施方式所涉及的立体物印刷装置100的概要的立体图。立体物印刷装置100为,通过喷墨方式而在作为立体物的一个示例的工件w的表面上实施印刷的装置。工件w具有形成屈曲或弯曲成凸状的角wc的第一面wf1以及第二面wf2。
28.在图1所示的示例中,工件w为长方体,第一面wf1以及第二面wf2相互正交,且通过它们的交叉而形成有角wc。在此,第一面wf1为朝向z1方向的平面。第二面wf2为朝向x1方向的平面。另外,工件w的形状只需是具有形成屈曲或弯曲成凸状的角的两个面以作为第一面以及第二面的形状即可,并不限定于图1所示的示例而为任意的形状。虽然详细内容将在后文的变形例中进行叙述,但是例如工件w的形状既可以为第一面wf1与第二面wf2所成的角小于90
°
的形状,也可以为第一面wf1与第二面wf2所成的角大于90
°
的形状。此外,工件w的设置姿态也并不限定于图1所示的示例而为任意的姿态。
29.在图1所示的示例中,立体物印刷装置100为使用垂直多关节机械臂的喷墨打印机。具体而言,如图1所示,立体物印刷装置100具有机械臂200、液体喷出头单元300、液体贮留部400、供给流道500和控制装置600。以下,首先对立体物印刷装置100的各部分依次进行简单说明。
30.机械臂200为使液体喷出头单元300相对于工件w的位置以及姿态发生变化的移动机构的一个示例。在图1所示的示例中,机械臂200为所谓的六轴的垂直多关节机械臂。具体而言,机械臂200具有基台210和臂220。
31.基台210为对臂220进行支承的台。在图1所示的示例中,基台210通过螺丝紧固等而被固定在朝向z1方向的底板面等设置面上。另外,固定有基台210的设置面可以为朝向任意方向的面,而并不限定于图1所示的示例,例如也可以为墙壁、顶棚、可移动的平板车等所具有的面。
32.臂220为,具有被安装在基台210上的基端、和使位置以及姿态相对于该基端而三维地发生变化的顶端的六轴的机械臂。具体而言,臂220具有臂221、222、223、224、225以及226,且它们按照该顺序而被连结。
33.臂221以能够围绕第一转动轴o1进行转动的方式而经由关节部231与基台210连结在一起。臂222以能够围绕第二转动轴o2进行转动的方式而经由关节部232与臂221连结在一起。臂223以能够围绕第三转动轴o3进行转动的方式而经由关节部233与臂222连结在一起。臂224以能够围绕第四转动轴o4进行转动的方式而经由关节部234与臂223连结在一起。臂225以能够围绕第五转动轴o5进行转动的方式而经由关节部235与臂224连结在一起。臂226以能够围绕第六转动轴o6进行转动的方式而经由关节部236与臂225连结在一起。
34.在图1所示的示例中,关节部231至236分别为对相邻的两个臂中的一方以能够相对于另一方而转动的方式进行连结的机构。虽然并未图示,但是在关节部231至236上分别设置有使相邻的两个臂中的一方相对于另一方而进行转动的驱动机构。该驱动机构例如具有产生用于该转动的驱动力的电机、对该驱动力进行减速并输出的减速器、和对该转动的
角度等进行检测的旋转式编码器等编码器。另外,该驱动机构相当于后文叙述的图2所示的臂驱动机构230。
35.第一转动轴o1为相对于固定有基台210的未图示的设置面而垂直的轴。第二转动轴o2为相对于第一转动轴o1而垂直的轴。第三转动轴o3为相对于第二转动轴o2而平行的轴。第四转动轴o4为相对于第三转动轴o3而垂直的轴。第五转动轴o5为相对于第四转动轴o4而垂直的轴。第六转动轴o6为相对于第五转动轴o5而垂直的轴。
36.另外,对于这些转动轴而言,“垂直”除了两个转动轴所成的角度严格为90
°
的情况之外,也包括两个转动轴所成的角度在90
°±5°
程度的范围内发生偏离的情况。同样地,“平行”除了两个转动轴严格地平行的情况之外,也包括两个转动轴中的一方相对于另一方而在
±5°
程度的范围内倾斜的情况。
37.在以上的臂221的顶端、即臂226上,作为末端执行器而安装有液体喷出头单元300。
38.液体喷出头单元300为具有朝向工件w喷出作为液体的一个示例的油墨的液体喷出头310的机构。在本实施方式中,液体喷出头单元300除了液体喷出头310之外,还具有对向液体喷出头310被供给的油墨的压力进行调节的压力调节阀320、和对与工件w之间的距离进行计测的位移传感器330。由于它们一同被固定在臂226上,因此相互的位置以及姿态的关系被固定。
39.关于液体喷出头310以及压力调节阀320,将在后文中进行详细叙述。位移传感器330例如为对从某个位置起向其他位置进行了移动时的位移量进行测量的光学式的位移传感器。另外,位移传感器330只需根据需要来设置即可,也可以省略。此外,虽然在图1所示的示例中液体喷出头单元300所具有的液体喷出头310以及压力调节阀320的各自的数量为一个,但是该数量并不限定于图1所示的示例,也可以为两个以上。此外,压力调节阀320以及位移传感器330的设置位置并不限定于臂226上,例如也可以为其他臂等上。
40.液体贮留部400为对油墨进行贮留的容器。液体贮留部400例如为由挠性的薄膜形成的袋状的油墨包。被贮留于液体贮留部400中的油墨例如为染料或颜料等包含颜色材料的油墨。另外,被贮留于液体贮留部400中的油墨的种类并不限定于包含颜色材料的油墨,例如也可以为金属粉末等包含导电材料的油墨。此外,也可以使油墨具有紫外线固化性等固化性。在油墨具有紫外线固化性等固化性的情况下,例如在液体喷出头单元300上搭载有紫外线照射机构。
41.在图1所示的示例中,液体贮留部400以始终位于与液体喷出头310相比靠z1方向的方式而被固定在壁、顶棚或柱等上。即,液体贮留部400位于与液体喷出头310的移动区域相比靠铅直方向上的上方处。因此,即使不使用泵等机构,也能够以预定的加压力而从液体贮留部400向液体喷出头310供给油墨。
42.另外,液体贮留部400的设置位置只需能够以预定的压力而从液体贮留部400向液体喷出头310供给油墨即可,也可以位于与液体喷出头310相比靠铅直方向上的下方处。在这种情况下,例如只需使用泵并以预定的压力而从液体贮留部400向液体喷出头310供给油墨即可。
43.供给流道500为从液体贮留部400向液体喷出头310供给油墨的流道。在供给流道500的中途处设置有压力调节阀320。因此,即使液体喷出头310与液体贮留部400的位置关
系发生变化,也能够减小液体喷出头310内的油墨的压力变动。
44.供给流道500通过压力调节阀320而被划分为上游流道510和下游流道520。即,供给流道500具有使液体贮留部400与压力调节阀320连通的上游流道510、和使压力调节阀320与液体喷出头310连通的下游流道520。
45.上游流道510以及下游流道520例如分别由管体的内部空间而构成。在此,上游流道510所使用的管体例如由橡胶材料或弹性体材料等弹性材料构成,且具有挠性。如此,通过使用具有挠性的管体来构成上游流道510,从而容许液体贮留部400与压力调节阀320的相对位置关系的变化。因此,即使液体贮留部400的位置以及姿态保持固定的状态而液体喷出头310的位置或姿态发生变化,也能够从液体贮留部400向压力调节阀320供给油墨。另一方面,下游流道520所使用的管体也可以不具有挠性。因此,下游流道520所使用的管体既可以由橡胶材料或弹性体材料等弹性材料来构成,也可以由树脂材料等硬质材料来构成。
46.另外,上游流道510的一部分也可以由不具有挠性的部件构成。此外,下游流道520并不限定于使用管体的结构。例如,下游流道520的一部分或全部既可以为具有将来自压力调节阀320的油墨分配给多个部位的分配流道的结构,也可以与液体喷出头310或压力调节阀320以一体的方式而构成。
47.控制装置600为对立体物印刷装置100的各部分的驱动进行控制的装置。在此,控制装置600对液体喷出头310以及机械臂200的驱动进行控制。关于控制装置600,将与以下的立体物印刷装置100的电气结构的说明一同进行详细叙述。
48.1-2.立体物印刷装置的电气结构
49.图2为表示第一实施方式所涉及的立体物印刷装置100的电气结构的框图。在图2中,示出了立体物印刷装置100的结构要素中的电气结构要素。如图2所示,控制装置600具有处理电路610、存储电路620、电源电路630和驱动信号生成电路640。
50.另外,以下所叙述的控制装置600中所包含的硬件结构也可以适当地被分割。例如,也存在控制装置600的臂控制部612和驱动信号生成电路640在不同的硬件结构中被单独设置的情况。此外,控制装置600的功能的一部分或全部也可以通过经由lan(local area network:局域网)或互联网等网络而与立体物印刷装置100连接的pc(personal computer:个人计算机)等外部装置来实现。
51.处理电路610具有对立体物印刷装置100的各部分的动作进行控制的功能、和对各种数据进行处理的功能。处理电路610例如包括一个以上的cpu(central processing unit:中央处理器)等处理器。另外,处理电路610也可以代替cpu或除cpu以外还包括fpga(field-programmable gate array:现场可编程逻辑门阵列)等可编程逻辑器件。
52.存储电路620对处理电路610所执行的程序p等各种程序、和处理电路610所处理的印刷数据img等各种数据进行存储。存储电路620例如包括ram(random access memory:随机存取存储器)等易失性的存储器和rom(read only memory:只读存储器)、eeprom(electrically erasable programmable read-only memory:带电可擦可编程只读存储器)或prom(programmable rom:可编程只读存储器)等非易失性存储器中的一方或双方的半导体存储器。印刷数据img从个人计算机等外部装置700被供给。另外,存储电路620也可以作为处理电路610的一部分而被构成。
53.电源电路630从未图示的商用电源接受电力的供给,并生成预定的各种电位。所生
成的各种电位适当地被供给至立体物印刷装置100的各部分。电源电路630例如生成电源电位vhv和偏移电位vbs。偏移电位vbs被供给至液体喷出头单元300。此外,电源电位vhv被供给至驱动信号生成电路640。
54.驱动信号生成电路640为,生成用于对液体喷出头310所具有的各压电元件311进行驱动的驱动信号com的电路。具体而言,驱动信号生成电路640例如具有da转换电路和放大电路。在驱动信号生成电路640中,通过该da转换电路将来自处理电路610的后文叙述的波形指定信号dcom从数字信号转换为模拟信号,且该放大电路使用来自电源电路630的电源电位vhv而将该模拟信号放大,从而生成驱动信号com。在此,驱动信号com中所包含的波形中的、实际被供给至压电元件311的波形的信号为驱动脉冲pd。驱动脉冲pd经由用于对压电元件311进行驱动的驱动电路340,而从驱动信号生成电路640被供给至压电元件311。驱动电路340基于后文叙述的控制信号si,而对是否将驱动信号com中所包含的波形中的至少一部分作为驱动脉冲pd来供给进行切换。
55.在以上的控制装置600中,通过处理电路610来执行被存储于存储电路620中的程序p,从而对立体物印刷装置100的各部分的动作进行控制。具体而言,处理电路610通过程序p的执行,从而作为信息取得部611、臂控制部612以及喷出控制部613而发挥功能。
56.信息取得部611取得机械臂200以及液体喷出头单元300的驱动所需的各种信息。具体而言,信息取得部611取得来自外部装置700的印刷数据img、来自臂驱动机构230中所包含的编码器的信息d1、和来自位移传感器330的信息d2。此外,信息取得部611适当地读取并取得被存储于存储电路620中的信息,或者使存储电路620适当地存储取得后的各种信息。
57.臂控制部612基于来自信息取得部611的信息而对机械臂200的驱动进行控制。具体而言,臂控制部612基于工件w的三维形状数据和来自臂驱动机构230的信息d1而生成控制信号sk。控制信号sk对臂驱动机构230中所包含的电机的驱动进行控制,以使液体喷出头310成为所需的位置以及姿态。该三维形状数据例如被包含在印刷数据img中,或者通过使用位移传感器330等的测量而获得。
58.另外,信息d1与液体喷出头的位置以及姿态的对应关系预先通过校准等而取得,并被存储在存储电路620中。而且,臂控制部612基于来自实际的臂驱动机构230的信息d1和该对应关系,来取得与实际的液体喷出头310的位置以及姿态相关的信息。在此基础上,使用与该位置以及姿态相关的信息来实施控制。此外,臂控制部612也可以使用来自位移传感器330的信息d2而适当地对控制信号sk进行调节,以使液体喷出头310与工件w的表面之间的距离被维持在预定范围内。
59.特别是臂控制部612为了跨及工件w的包括角wc在内的范围而对第一面wf1或第二面wf2进行印刷,从而对液体喷出头310的姿态进行控制。
60.喷出控制部613基于来自信息取得部611的信息而对液体喷出头单元300的驱动进行控制。具体而言,喷出控制部613基于印刷数据img而生成控制信号si和波形指定信号dcom。控制信号si为,用于对液体喷出头310所具有的后文叙述的压电元件311的动作状态进行指定的数字的信号。在此,在控制信号si中,也可以包括用于对压电元件311的驱动定时进行规定的定时信号等其他信号。该定时信号例如基于来自臂驱动机构230中所包含的编码器的信息d1而被生成。波形指定信号dcom为用于对驱动信号com的波形进行规定的数
字信号。
61.1-3.液体喷出头以及压力调节阀
62.图3为表示第一实施方式的液体喷出头单元300的简要结构的立体图。
63.以下的说明适当地使用相互交叉的a轴、b轴以及c轴来进行。此外,将沿着a轴的一个方向称为a1方向,并将与a1方向相反的方向称为a2方向。同样地,将沿着b轴而彼此相反的方向称为b1方向以及b2方向。此外,将沿着c轴而彼此相反的方向称为c1方向以及c2方向。
64.在此,a轴、b轴以及c轴为,被设定在液体喷出头单元300中的工具坐标系的坐标轴,并且其与前文所述的x轴、y轴以及z轴的相对位置以及姿态的关系根据前文所述的机械臂200的动作而发生变化。在图3所示的示例中,c轴为与前文所述的第六转动轴o6平行的轴。另外,虽然a轴、b轴以及c轴典型而言相互正交,但是并不限定于此,例如只需以80
°
以上且100
°
以下的范围内的角度而交叉即可。
65.如前文所述,液体喷出头单元300具有液体喷出头310、压力调节阀320和位移传感器330。它们被以图3中的双点划线所示的支承体350支承。
66.支承体350例如由金属材料等构成,且为实质上的刚体。另外,虽然在图3中支承体350呈扁平的箱状,但是支承体350的形状并未被特别限定而是为任意的形状。
67.以上的支承体350被安装在前文所述的臂220的顶端、即臂226上。因此,液体喷出头310、压力调节阀320和位移传感器330分别被固定在臂226上。
68.在图3所示的示例中,压力调节阀320相对于液体喷出头310而位于c1方向上。位移传感器330相对于液体喷出头310而位于a2方向上。
69.此外,在图3所示的示例中,供给流道500的下游流道520的一部分由流道部件521而构成。流道部件521具有将来自压力调节阀320的油墨分配给液体喷出头310的多个部位的流道。流道部件521例如为由树脂材料构成的多个基板的层压体,且在各基板上适当地设置有用于油墨的流道的沟槽或孔。
70.液体喷出头310具有喷嘴面f、和在喷嘴面f上开口的多个喷嘴n。在图3所示的示例中,喷嘴面f的法线方向为c2方向,且该多个喷嘴n被划分为在沿着a轴的方向上以相互隔开间隔的方式而排列的第一喷嘴列l1和第二喷嘴列l2。第一喷嘴列l1以及第二喷嘴列l2分别为在沿着b轴的方向上排列成直线状的多个喷嘴n的集合。在此,液体喷出头310中的与第一喷嘴列l1的各喷嘴n相关联的要素和与第二喷嘴列l2的各喷嘴n相关联的要素为在沿着a轴的方向上相互大致对称的结构。
71.但是,第一喷嘴列l1中的多个喷嘴n和第二喷嘴列l2中的多个喷嘴n在沿着b轴的方向上的位置既可以相互一致也可以有所不同。此外,也可以省略与第一喷嘴列l1以及第二喷嘴列l2中的一方的各喷嘴n相关联的要素。在下文中,对第一喷嘴列l1中的多个喷嘴n和第二喷嘴列l2中的多个喷嘴n在沿着b轴的方向上的位置相互一致的结构进行例示。
72.图4为表示第一实施方式的液体喷出头310的结构例的剖视图。如图4所示,液体喷出头310具有流道基板312、压力室基板313、喷嘴板314、吸振体315、振动板316、多个压电元件311、配线基板317和框体部318。
73.流道基板312以及压力室基板313形成用于向多个喷嘴n供给油墨的流道。流道基板312和压力室基板313以该顺序而在c1方向上被层压。流道基板312以及压力室基板313分
别为在沿着b轴的方向上狭长的板状部件。流道基板312以及压力室基板313例如通过粘合剂而被相互接合。
74.在位于与压力室基板313相比靠c1方向的区域内,设置有振动板316、配线基板317、框体部318和驱动电路340。另一方面,在位于与流道基板312相比靠c2方向的区域内,设置有喷嘴板314和吸振体315。这些各要素示意性地为与流道基板312以及压力室基板313同样地在沿着b轴的方向上狭长的板状部件,且例如通过粘合剂而被相互接合。
75.喷嘴板314为,在其上形成有多个喷嘴n的板状部件。多个喷嘴n分别为使油墨通过的圆形形状的贯穿孔。喷嘴板314例如通过利用使用干式蚀刻或湿式蚀刻等加工技术的半导体制造技术来对单晶硅基板进行加工从而被制造出。但是,在喷嘴板314的制造中,也可以适当地使用其他公知的方法以及材料。
76.在此,前文所述的喷嘴面f为,构成液体喷出头310的外形的面中的、从喷嘴n的c2方向上的一端的开口起沿着与c轴垂直的方向而扩大的面。在图4所示的示例中,液体喷出头310的朝向c2方向的面为喷嘴面f,且在喷嘴面f上包括喷嘴板314的朝向c2方向的面。此外,喷嘴面f的a2方向上的一端、即喷嘴面f的位于最靠a2方向的部分为第一端e1,且喷嘴面f的a1方向上的一端、即喷嘴面f的位于最靠a1方向的部分为第二端e2。在本实施方式中,第一端e1以及第二端e2分别为沿着b轴的边。在喷嘴面f上的第一端e1与第二端e2之间,设置有前文所述的第一喷嘴列l1以及第二喷嘴列l2。
77.另外,在具有对喷嘴板314的朝向c2方向的面的一部分进行覆盖的结构体的情况下,也可以将该结构体的朝向c2方向的面理解为喷嘴面f的一部分。作为该结构体的一个示例可列举出头罩。头罩为,对由喷嘴板314、吸振体315、流道基板312以及框体部318等构成的层压体的朝向c2方向的面的至少一部分进行覆盖的结构体,并且通过粘合剂而被固定在该层压体上。头罩例如通过对由不锈钢等金属材料构成的板状部件进行折弯加工从而被形成。在使用这样的头罩的情况下,既可以将头罩的a1方向上的一端理解为第一端e1,也可以将该头罩的a2方向上的一端理解为第二端e2。当在喷嘴面f的延长线上具有后文叙述的支承体350等结构体的情况下,既可以将该结构体的a1方向上的一端理解为第一端e1,也可以将该结构体的a2方向上的一端理解为第二端e2。此外,虽然喷嘴面f的外形典型而言为长方形,但是并不限定于此而是为任意的外形。
78.在流道基板312上,针对第一喷嘴列l1以及第二喷嘴列l2而分别设置有空间ra、多个供给流道312a、多个连通流道312b和供给液室312c。空间ra为,当在沿着c轴的方向上观察的俯视观察时于沿着b轴的方向上延伸的长条状的开口。供给流道312a以及连通流道312b分别为针对每个喷嘴n而被形成的贯穿孔。供给液室312c为跨及多个喷嘴n而在沿着b轴的方向上延伸的长条状的空间,并且使空间ra与多个供给流道312a相互连通。多个连通流道312b中的每一个在俯视观察时与对应于该连通流道312b的一个喷嘴n重叠。
79.压力室基板313为,针对第一喷嘴列l1以及第二喷嘴列l2而分别形成有被称为空腔的多个压力室cv的板状部件。多个压力室cv在沿着b轴的方向上被排列。各压力室cv为,针对每个喷嘴n而被形成且在俯视观察时于沿着a轴的方向上延伸的长条状的空间。与前文所述的喷嘴板314同样地,流道基板312以及压力室基板313例如分别通过利用半导体制造技术来对单晶硅基板进行加工从而被制造出。但是,在流道基板312以及压力室基板313的各自的制造中,也可以适当地使用其他公知的方法以及材料。
80.压力室cv为位于流道基板312与振动板316之间的空间。针对第一喷嘴列l1以及第二喷嘴列l2中的每一列,多个压力室cv分别在沿着b轴的方向上而被排列。此外,压力室cv分别与连通流道312b以及供给流道312a连通。因此,压力室cv经由连通流道312b而与喷嘴n连通,且经由供给流道312a和供给液室312c而与空间ra连通。
81.在压力室基板313的朝向c2方向的面上配置有振动板316。振动板316为能够进行弹性振动的板状部件。振动板316例如具有由氧化硅(sio2)所构成的弹性膜、和由氧化锆(zro2)所构成的绝缘膜,且它们被层压在一起。该弹性膜例如通过使单晶硅基板中的一个面热氧化从而被形成。该绝缘膜例如通过利用喷溅法而形成锆层并使该层热氧化从而被形成。
82.在振动板316的朝向c1方向的面上,针对第一喷嘴列l1以及第二喷嘴列l2中的每一列而配置有与各喷嘴n相对应的多个压电元件311。各压电元件311为通过前述的驱动脉冲pd的供给而发生变形的无源元件。各压电元件311呈在俯视观察时在沿着a轴的方向上延伸的长条状。多个压电元件311以与多个压力室cv相对应的方式而在沿着b轴的方向上被排列。当振动板316以与压电元件311的变形联动的方式进行振动时,通过使压力室cv内的压力发生变动,从而使油墨从喷嘴n朝向c2方向被喷出。
83.框体部318为用于对向多个压力室cv被供给的油墨进行贮留的壳体。如图4所示,在本实施方式的框体部318中,针对第一喷嘴列l1以及第二喷嘴列l2中的每一列而形成有空间rb。框体部318的空间rb与流道基板312的空间ra相互连通。由空间ra和空间rb构成的空间作为对向多个压力室cv被供给的油墨进行贮留的液体贮留室(贮液器)r而发挥功能。在液体贮留室r中,经由被形成于框体部318上的导入口318a而被供给有油墨。液体贮留室r内的油墨经由供给液室312c和各供给流道312a而被供给至压力室cv。吸振体315为构成液体贮留室r的壁面的挠性的薄膜(可塑性基板),并且对液体贮留室r内的油墨的压力变动进行吸收。
84.配线基板317为,形成有用于对驱动电路340和多个压电元件311进行电连接的配线的板状部件。配线基板317的朝向c2方向的面经由导电性的多个凸点t而与振动板316相接合。另一方面,在配线基板317的朝向c1方向的面上安装有驱动电路340。
85.驱动电路340为,输出用于对各压电元件311进行驱动的驱动信号以及基准电压的ic(integrated circuit:集成电路)芯片。具体而言,驱动电路340基于前文所述的控制信号si,并针对多个压电元件311中的每一个而对是否将驱动信号com作为驱动脉冲pd来供给进行切换。
86.虽然并未图示,但是在配线基板317的朝向c1方向的面上接合有与控制装置600被电连接的外部配线的端部。该外部配线例如由fpc(flexible printed circuits:柔性印刷电路板)或ffc(flexible flat cable:柔性扁平电缆)等连接部件而构成。另外,配线基板317也可以为fpc或ffc等。
87.图5为表示第一实施方式中的压力调节阀320的结构例的俯视图。图6为图5中的a-a线剖视图。压力调节阀320为根据液体喷出头310内的油墨的压力而进行开闭的阀机构。通过该开闭,从而使液体喷出头310内的油墨的压力被维持为预定范围内的负压。因此,实现了形成在液体喷出头310的喷嘴n中的油墨的弯液面的稳定化。其结果为,防止了气泡进入喷嘴n内、或者油墨从喷嘴n溢出的情况。
88.如图6所示,压力调节阀320具有流道部件321、密封部件322、密封部件323、阀体324、施力部件325和施力部件326。
89.流道部件321为,具有使前文所述的供给流道500中的上游流道510和下游流道520连通的流道q的结构体。流道部件321例如由聚丙烯等树脂材料构成,并通过注塑成形等而被形成。如图5所示,在流道部件321上设置有供给口p1以及排出口p2。供给口p1以及排出口p2经由流道q而连通。在供给口p1上连接有上游流道510。在排出口p2上连接有下游流道520。
90.如图6所示,流道q具有上游侧液室q1以及下游侧液室q2。上游侧液室q1为经由未图示的流道而与前文所述的供给口p1连通的空间。另一方面,下游侧液室q2为经由未图示的流道而与前文所述的排出口p2连通的空间。
91.在图5以及图6所示的示例中,流道部件321的外形为将a1方向或a2方向设为厚度方向的大致板状,且上游侧液室q1以及下游侧液室q2在流道部件321的厚度方向上排列。在此,在流道部件321的朝向a2方向的面上设置有用于形成上游侧液室q1的凹部321a。另一方面,在流道部件321的朝向a1方向的面上设置有用于形成下游侧液室q2的凹部321b。
92.上游侧液室q1以及下游侧液室q2的各自的形状在于a1方向或a2方向观察的俯视观察时为圆形。在图6所示的示例中,俯视观察时的下游侧液室q2的面积与俯视观察下的上游侧液室q1的面积相比而较大。另外,上游侧液室q1以及下游侧液室q2的形状或大小等并不限定于图5以及图6所示的示例而为任意的形状或大小。
93.在流道部件321中的上游侧液室q1与下游侧液室q2之间设置有阀座321c。阀座321c为对上游侧液室q1与下游侧液室q2进行分隔的隔壁,并构成前文所述的凹部321b以及凹部321a的各自的底部。换而言之,阀座321c将流道q划分为上游侧液室q1和下游侧液室q2。在阀座321c上设置有孔321d。孔321d在a1方向或a2方向上延伸,且使上游侧液室q1与下游侧液室q2连通。
94.密封部件322为,通过融合或粘合等而与流道部件321相接合以堵塞前文所述的凹部321a的开口的部件。密封部件322例如由聚丙烯(pp)或聚苯硫醚(pps)等树脂材料构成。密封部件322具有构成上游侧液室q1的壁面的一部分的部分322a。部分322a的刚性与密封部件322的刚性相比而较高。优选为,部分322a具有不会因上游侧液室q1内的油墨的压力变动而实质性地发生变形的程度的刚性。
95.密封部件323为,通过融合或粘合等而与流道部件321相接合以堵塞前文所述的凹部321b的开口的薄片状的部件。密封部件323例如由聚丙烯(pp)或聚苯硫醚(pps)等树脂材料构成。密封部件323具有作为构成下游侧液室q2的壁面的一部分的部分的挠性部323a。挠性部323a具有根据下游侧液室q2内的油墨的压力而发生挠曲变形的挠性。
96.在此,挠性部323a将被大气开放的空间与下游侧液室q2隔开,并且由于下游侧液室q2内的油墨的压力与大气压相比而较低,从而在挠性部323a上施加有朝向下游侧液室q2的力。在图6所示的示例中,在挠性部323a的中央部处设置有受压板323b。受压板323b例如由聚丙烯(pp)或聚苯硫醚(pps)等树脂材料构成。另外,受压板323b既可以与挠性部323a被一体构成,也可以与挠性部323a被分体构成。此外,受压板323b只需根据需要来设置即可,其既可以被固定在阀体324上,也可以省略。
97.阀体324具有轴部324a、凸缘部324b和密封部324c。轴部324a以及凸缘部324b例如
由聚丙烯(pp)或聚苯硫醚(pps)等树脂材料构成,并通过注塑成形等而被一体形成。
98.轴部324a在a1方向或a2方向上延伸,并被插入至孔321d中。轴部324a的宽度与孔321d的宽度相比而较小。因此,轴部324a的a1方向或a2方向上的移动被容许,并且在轴部324a的外周面与孔321d的内周面之间形成有容许油墨的流动的空隙。轴部324a的a1方向上的一端被配置在下游侧液室q2中,并与受压板323b相接触。另一方面,轴部324a的a2方向上的一端被配置在上游侧液室q1中。
99.凸缘部324b被设置在轴部324a的a2方向上的一端处,并被配置在上游侧液室q1中。凸缘部324b的宽度与孔321d的宽度相比而较大,且与上游侧液室q1或凹部321a的宽度相比而较小。通过使凸缘部324b的宽度与孔321d的宽度相比而较大,从而能够使密封部324c介于凸缘部324b与阀座321c之间。此外,通过使凸缘部324b的宽度与凹部321a的宽度相比而较小,从而使得凸缘部324b的a1方向或a2方向上的移动被容许,并且在凸缘部324b的外周面与凹部321a的内周面之间形成有容许油墨的流动的空隙。
100.密封部324c以具有介于阀座321c与凸缘部324b之间的部分的方式而被配置在凸缘部324b的表面上。密封部324c为具有弹性的部件,并且例如由硅类或氟类等的橡胶材料或弹性体材料构成。
101.施力部件325为,被配置在上游侧液室q1中并对阀体324朝向阀座321c而施力的弹性体。在图6所示的示例中,施力部件325为螺旋弹簧,且在发生了压缩变形的状态下被配置在阀体324与密封部件322之间。另外,虽然在图6所示的示例中该螺旋弹簧的宽度是恒定的,但是并不限定于此,例如也可以使该螺旋弹簧的宽度从一端起朝向另一端而扩大。此外,施力部件325只需能够对阀体324朝向阀座321c而施力即可,并不限定于螺旋弹簧,例如也可以为板簧等。
102.施力部件326为,被配置在下游侧液室q2中并对挠性部323a的挠性变形的容易程度进行调节的弹性体。在图6所示的示例中,施力部件326为螺旋弹簧,且被配置在阀座321c与受压板323b之间。另外,虽然在图6所示的示例中该螺旋弹簧的宽度是恒定的,但是并不限定于此,例如也可以使该螺旋弹簧的宽度从一端起朝向另一端而扩大。此外,施力部件326并不限定于螺旋弹簧,例如也可以为板簧等。此外,施力部件326只需根据需要来设置即可,也可以省略。
103.在以上的压力调节阀320中,由于在下游侧液室q2内的油墨的压力被维持为预定的范围内的负压的通常状态下,会使得密封部324c通过施力部件325的施力而紧贴在阀座321c上,因此会导致上游侧液室q1与下游侧液室q2被隔断。即,在通常状态下,流道q被封堵。
104.另一方面,当因由液体喷出头310实施的油墨的喷出等而引起下游侧液室q2内的油墨的负压上升至预定以上时,如图6中的双点划线所示的那样,将会伴随着有挠性部323a的挠性变形而使得受压板323b克服施力部件325以及施力部件326的施力而使阀体324发生位移。其结果为,由于在密封部324c与阀座321c之间形成有空隙,因此使得上游侧液室q1与下游侧液室q2经由孔321d而连通。即,流道q被开放。
105.当流道q被开放时,会使得来自液体贮留部400的油墨从上游侧液室q1经由孔321d而被供给至下游侧液室q2。伴随于该供给,下游侧液室q2的内的油墨的负压会降低。其结果为,由于密封部324c通过施力部件325的施力而再次紧贴在阀座321c上,因此会导致上游侧
液室q1与下游侧液室q2被隔断。如上文所述,通过使压力调节阀320根据液体喷出头310内的油墨的压力来进行开闭,从而下游侧液室q2内的油墨的压力维持为预定范围内的负压。
106.如上文所述,立体物印刷装置100具有液体喷出头310、作为移动机构的一个示例的机械臂200、和作为控制部的一个示例的控制装置600。在此,液体喷出头310具有喷嘴面f,在所述喷嘴面f上设置有喷出作为液体的一个示例的油墨的多个喷嘴n。机械臂200使液体喷出头310相对于立体工件w的相对位置以及姿态而发生变化。控制装置600对液体喷出头310以及机械臂200的各自的驱动进行控制。
107.在此,如前文所述,工件w具有第一面wf1、和在与第一面wf1之间形成屈曲或弯曲成凸状的角wc的第二面wf2。控制装置600为了跨及包括角wc或其附近在内的范围而对第一面wf1进行印刷从而执行第一印刷动作。第一印刷动作为,伴随有沿着第一面wf1的方向上的液体喷出头310的移动而对第一面wf1实施印刷的动作。此外,控制装置600为了跨及包括角wc或其附近在内的范围而对第二面wf2进行印刷从而执行第二印刷动作。第二印刷动作为,伴随有沿着第二面wf2的方向上的液体喷出头310的移动而对第二面wf2实施印刷的动作。以下,对第一印刷动作以及第二印刷动作进行详细叙述。
108.1-4.立体物印刷装置的动作以及立体物印刷方法
109.图7为用于对第一实施方式中的第一印刷动作进行说明的图。图8为用于对第一实施方式中的第二印刷动作进行说明的图。
110.在图7中,示出了跨及包括角wc在内的范围而在工件w的第一面wf1上实施印刷的情况下的液体喷出头单元300的位置的变化。在图8中,示出了跨及包括角wc在内的范围而在工件w的第二面wf2上实施印刷的情况下的液体喷出头单元300的位置的变化。另外,在图7以及图8中,第一喷嘴列l1以及第二喷嘴列l2相对于y轴而平行。更加详细而言,在图7中,c2方向与y轴正交,且为x1方向与z2方向之间的方向,a2方向与y轴正交,且为x1方向与z1方向之间的方向,b轴与y轴平行,而在图8中,c2方向与y轴正交,且为x2方向与z1方向之间的方向,a2方向与y轴正交,且为x2方向与z2方向之间的方向,b轴与y轴平行。此外,虽然在图7以及图8中液体喷出头310的中心位置作为液体喷出头310的位置而被图示出,但也可以将液体喷出头310的任意的部位的位置理解为液体喷出头310的位置。
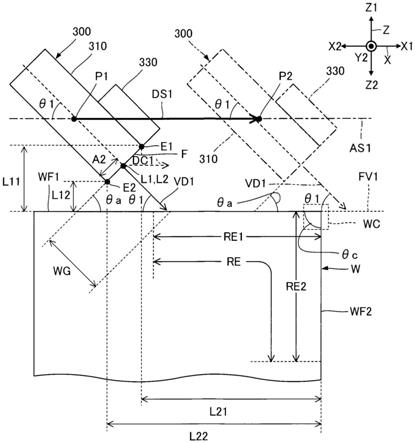
111.如图7所示,本实施方式的第一印刷动作通过在使液体喷出头单元300沿着第一面wf1而从位置p1向位置p2移动的同时使油墨从液体喷出头310喷出,从而在第一面wf1的区域re1中实施印刷。
112.位置p1为,由液体喷出头310形成的油墨的喷落位置成为第一面wf1上的任意的位置的液体喷出头310的位置。位置p2为,由液体喷出头310形成的油墨的喷落位置成为角wc或其附近的液体喷出头310的位置,或者为与该位置相比沿着x1方向而更远离位置p1的位置、且为来自液体喷出头310的油墨成为未喷落在第一面wf1上而从沿着第一面wf1延展出的假想面上通过的状态的、液体喷出头310的位置。因此,能够跨及包括角wc或其附近在内的范围而对第一面wf1实施印刷。
113.在图7所示的示例中,位置p2为,来自液体喷出头310的油墨成为未喷落在第一面wf1上而是从沿着第一面wf1而延展出的假想面fv1上通过的状态的、液体喷出头310的位置。虽然也可以使位置p2在沿着z轴的方向进行观察时相对于角wc而位于x1方向上,但是在图7所示的示例中,在沿着z轴的方向进行观察时,位置p2相对于角wc而位于x2方向上。因
此,在第一印刷动作中,在相对于第一面wf1而垂直的方向、即沿着z轴的方向进行观察时,多个喷嘴n的路径与角wc交叉。因此,在来自液体喷出头310的油墨成为未喷落在第一面wf1上而是从沿着第一面wf1延展出的假想面fv1上通过的状态下,能够使液体喷出头310的移动速度逐渐减小,从而在对于区域re1的印刷过程中无需进行减速。因此,能够减小对于区域re1的印刷过程中的液体喷出头310的移动速度的变动。减小该变动具有易于提升对于区域re1的印刷的画质这样的优点。
114.在第一印刷动作中,控制装置600对机械臂200的驱动进行控制,以使第一喷出矢量vd1具有沿着第一扫描轴as1而朝向第二面wf2的方向的成分dc1。在此,如前文所述,第一扫描轴as1为,沿着对第一面wf1实施印刷的第一印刷动作中的液体喷出头310相对于工件w的扫描方向ds1的轴。典型而言,第一扫描轴as1为与第一面wf1平行的轴。第一喷出矢量vd1为第一印刷动作中的喷嘴面f的法线矢量。此外,第一喷出矢量vd1的方向为,作为第一印刷动作中的喷嘴面f的法线方向的第一喷出方向的一个示例。
115.如上文所述,控制装置600执行在使喷嘴面f相对于第一面wf1而倾斜的状态下对第一面wf1实施印刷的第一印刷动作。即,在第一印刷动作中,第一扫描轴as1与第一喷出矢量vd1的方向所成的角度θ1为锐角,且使油墨喷落在与沿着第一扫描轴as1的方向上的多个喷嘴n的位置相比而更接近于角wc的位置处。
116.在此,如图7所示,喷嘴面f具有由被排列的多个喷嘴n构成的作为喷嘴的一个示例的第一喷嘴列l1以及第二喷嘴列l2、与该多个喷嘴n的排列方向交叉的方向上的第一端e1、以及与第一端e1为相反侧的第二端e2。此外,在第一印刷动作中,第一端e1与第一面wf1之间的距离l11大于第二端e2与第一面wf1之间的距离l12,且第一端e1与第二面wf2之间的距离l21小于第二端e2与第二面wf2之间的距离l22。
117.在这样的第一印刷动作中,即使在跨及包括角wc或其附近在内的范围而对第一面wf1进行印刷的情况下,在从第一喷嘴列l1或第二喷嘴列l2而向第一喷出矢量vd1的方向进行观察时,第二面wf2也始终成为第一面wf1的背面。因此,能够防止或减少在进行对于第一面wf1的印刷时从第一喷嘴列l1或第二喷嘴列l2被喷出的油墨附着在第二面wf2上的情况。其结果为,能够在减少第二面wf2被不必要的油墨弄脏的情况的同时,跨及包括角wc或其附近在内的范围而在第一面wf1上实施印刷。此外,通过减少在进行对于第一面wf1的印刷时附着在第二面wf2上的油墨,从而还具有易于提升后文叙述的对于第二面wf2的印刷的画质这样的优点。
118.在此,如图7所示,控制装置600在第一印刷动作中,以在将第二端e2与第一喷嘴列l1或第二喷嘴列l2之间的距离设为a2、将喷嘴面f的法线方向上的第一喷嘴列l1与第一面wf1或者第二喷嘴列l2与第一面wf1之间的距离设为wg、且将喷嘴面f的法线方向与第一面wf1所成的角度设为θ1
°
时满足a2≤wg
×
tanθ1的方式,而对机械臂200的驱动进行控制。因此,防止了在进行第一印刷动作时液体喷出头310中的位于最接近于第一面wf1的位置处的第二端e2与第一面wf1相接触的情况。
119.此外,如图7所示,当将第一面wf1与第二面wf2所成的角度设为θc
°
时,在第一印刷动作中,角度θ1
°
与(180-θc)
°
相比而较小。在图7所示的示例中,由于θc为90
°
,因此θ1小于90
°
。即,θ1为锐角。如此,通过使角度θ1
°
小于(180-θc)
°
而设为锐角,从而在第一印刷动作中,当从第一喷嘴列l1或第二喷嘴列l2而向第一喷出矢量vd1的方向进行观察时,第二面
wf2始终成为第一面wf1的背面。另外,在θc小于90
°
的情况、以及θc大于90
°
的情况下,角度θ1
°
也小于(180-θc)
°
而为锐角。
120.在本实施方式中,控制装置600在第一印刷动作中使液体喷出头310相对于工件w而向靠近第二面wf2的方向进行相对移动。因此,在像本实施方式那样在对于第一面wf1的印刷之后接着实施对于第二面wf2的印刷的情况下,与使液体喷出头310相对于工件w而向远离第二面wf2的方向进行相对移动的动作相比,能够缩短液体喷出头310的移动路径。
121.另一方面,如图8所示,本实施方式的第二印刷动作通过在使液体喷出头单元300沿着第二面wf2而从位置p3向位置p4移动的同时使油墨从液体喷出头310喷出,从而在第二面wf2的区域re2上实施印刷。
122.位置p4为,由液体喷出头310实施印刷的印刷位置成为第二面wf2上的任意的位置的液体喷出头310的位置。位置p3为,由液体喷出头310实施印刷的印刷位置成为角wc或其附近的液体喷出头310的位置,或者为与该位置相比沿着z1方向而更远离位置p4的位置、且为来自液体喷出头310的油墨成为未喷落在第二面wf2上而从沿着第二面wf2延展出的假想面上通过的状态的、液体喷出头310的位置。因此,能够跨及包括角wc或其附近在内的范围而对第二面wf2实施印刷。在本实施方式中,通过第一印刷动作以及第二印刷动作的双方,从而在包括区域re1以及区域re2在内的区域re上实施印刷。在此,能够在不会形成完全未被印刷的区域的条件下于区域re1与区域re2之间实施印刷。
123.在图8所示的示例中,位置p3为,来自液体喷出头310的油墨成为未喷落在第二面wf2上而是从沿着第二面wf2延展出的假想面fv2上通过的状态的、液体喷出头310的位置。虽然也可以使位置p3在沿着x轴的方向进行观察时相对于角wc而位于z1方向上,但是在图7所示的示例中,在沿着x轴的方向进行观察时,位置p3相对于角wc而位于z2方向上。因此,在第二印刷动作中,在相对于第二面wf2而垂直的方向、即沿着x轴的方向进行观察时,多个喷嘴n的路径与角wc交叉。因此,在来自液体喷出头310的油墨成为未喷落在第一面wf1上而是从沿着第一面wf1延展出的假想面fv2上通过的状态下,能够使液体喷出头310的移动速度逐渐增加而进行加速,从而在对于区域re2的印刷过程中无需进行加速。因此,能够减小对于区域re2的印刷过程中的液体喷出头310的移动速度的变动。减小该变动具有易于提升对于区域re2的印刷的画质这样的优点。
124.在第二印刷动作中,控制装置600对机械臂200的驱动进行控制,以使第二喷出矢量vd2具有沿着第二扫描轴as2而朝向第一面wf1的方向的成分dc2。在此,第二扫描轴as2为,沿着对第二面wf2实施印刷的第二印刷动作中的液体喷出头310相对于工件w的扫描方向ds2的轴。典型而言,第二扫描轴as2为与第二面wf2平行的轴。此外,第二喷出矢量vd2为第二印刷动作中的喷嘴面f的法线矢量。此外,第二喷出矢量vd2的方向为,作为第二印刷动作中的喷嘴面f的法线方向的第二喷出方向的一个示例。
125.如上文所述,控制装置600执行在使喷嘴面f相对于第二面wf2而倾斜的状态下对第二面wf2实施印刷的第二印刷动作。即,在第二印刷动作中,第二扫描轴as2与第二喷出矢量vd2的方向所成的角度θ2为锐角,且使油墨喷落在与沿着第二扫描轴as2的方向上的多个喷嘴n的位置相比而更接近于角wc的位置处。
126.在此,如图8所示,在第二印刷动作中,第一端e1与第二面wf2之间的距离l21小于第二端e2与第二面wf2之间的距离l22,且第一端e1与第一面wf1之间的距离l11大于第二端
e2与第一面wf1之间的距离l12。
127.在这样的第二印刷动作中,即使在跨及包括角wc或其附近在内的范围而对第二面wf2进行印刷的情况下,在从第一喷嘴列l1或第二喷嘴列l2而向第二喷出矢量vd2的方向进行观察时,第一面wf1也始终成为第二面wf2的背面。因此,能够防止或减少在进行对于第二面wf2的印刷时,从第一喷嘴列l1或第二喷嘴列l2被喷出的油墨附着在第一面wf1上的情况。其结果为,能够在减少第一面wf1被不必要的油墨弄脏的情况的同时,跨及包括角wc或其附近在内的范围而在第二面wf2上实施印刷。此外,通过减少在进行对于第二面wf2的印刷时附着在第一面wf1上的油墨,从而还具有易于提升前文所述的对于第一面wf1的印刷的画质这样的优点。
128.在本实施方式中,控制装置600在第二印刷动作中使液体喷出头310相对于工件w而向从第一面wf1远离的方向进行相对移动。因此,在像本实施方式那样在对于第一面wf1的印刷之后接着实施对于第二面wf2的印刷的情况下,通过使液体喷出头310依次沿着第一面wf1以及第二面wf2而连续地进行移动,从而能够对第一面wf1以及第二面wf2实施印刷。因此,与使液体喷出头310相对于工件w而向靠近第一面wf1的方向进行相对移动的动作相比,能够缩短液体喷出头310的移动路径。另外,在本实施方式中,使液体喷出头310的位置在第一印刷动作之后且第二印刷动作之前从位置p2向位置p3移动。此时,液体喷出头310的姿态以前文所述的方式而被变更。
129.在本实施方式中,控制装置600对第一扫描轴as1与第一喷出矢量vd1或者第一扫描轴as1与第二喷出矢量vd2所成的角度进行调节,以使第一扫描轴as1与第一喷出矢量vd1所成的角度θ1、和第二扫描轴as2与第二喷出矢量vd2所成的角度θ2彼此相等。即,第一印刷动作中的喷嘴面f相对于第一面wf1的倾斜角度θa、和第二印刷动作中的喷嘴面f相对于第二面wf2的倾斜角度θb彼此相等。因此,能够在第一印刷动作和第二印刷动作中以相同或相近的条件来实施印刷,从而使得画质等的调节较为容易。
130.2.第二实施方式
131.以下,对本发明的第二实施方式进行说明。在以下所例示的方式中,对于作用或功能与第一实施方式同样的要素而沿用在第一实施方式的说明中所使用的符号,并适当地省略各自的详细说明。
132.图9为用于对第二实施方式中的第一印刷动作进行说明的图。图10为用于对第二实施方式中的第二印刷动作进行说明的图。本实施方式除了第二印刷动作中的液体喷出头310的姿态有所不同并且具有回收机构800以外,均与前文所述的第一实施方式相同。
133.在本实施方式中,在第一印刷动作与第二印刷动作之间的期间,使液体喷出头310的姿态围绕沿着喷嘴面f的法线的中心轴而旋转180
°
。因此,图10所示的第二印刷动作中的液体喷出头310的姿态相对于图9所示的第一印刷动作中的液体喷出头310的姿态而围绕该中心轴相差180
°
。
134.如上文所述,控制装置600在第一印刷动作中将第一端e1设为与第二端e2相比而更接近于第二面wf2的位置。此外,控制装置600在第二印刷动作中将第一端e1设为与第二端e2相比而更接近于第一面wf1的位置。如此,通过使液体喷出头310的姿态在第一印刷动作和第二印刷动作中围绕沿着喷嘴面f的法线的中心轴而有所不同,从而能够当在液体喷出头310的第一端e1附近处存在位移传感器330等结构体的情况下缩短距离wg。因此,易于
在第一印刷动作以及第二印刷动作的双方中提升印刷品质。相对于此,当在第一印刷动作中将第二端e2设为与第一端e1相比而更接近于第二面wf2的位置的情况下,需要延长距离wg以免位移传感器330与第一面wf1相接触。同样地,当在第二印刷动作中将第二端e2设为与第一端e1相比而更接近于第一面wf1的位置的情况下,需要延长距离wg以免位移传感器330与第二面wf2相接触。
135.回收机构800为,对从液体喷出头310被喷出的油墨中的、未喷落在工件w的表面上而漂浮的油墨滴进行回收的机构。在图9以及图10所示的示例中,回收机构800具有对该油墨滴进行抽吸的管道810。在管道810上连接有未图示的抽吸机构,该抽吸机构产生将油墨滴抽吸至管道810内的气流。另外,管道810的形状并不限定于图9以及图10所示的示例而是为任意的形状。此外,回收机构800的结构只需能够对该油墨滴进行回收即可,并不限定于将油墨抽吸至管道810内的结构,例如既可以为使用通过静电力等吸附力来进行吸附的吸附部件的结构,也可以为使用仅对油墨滴进行附着并吸收的部件的结构。
136.如图9所示,在第一印刷动作中,管道810沿着第二面wf2而被配置,以对未喷落在第一面wf1上而是越过假想面fv1而漂浮的油墨滴进行回收。如此,通过利用回收机构800来对未喷落在工件w上而是飞散了的油墨滴进行回收,从而不仅使得第一印刷动作中的油墨滴向第二面wf2的附着更困难,而且还防止了不必要的油墨滴附着在立体物印刷装置100的各部分或周边部上的情况。同样地,如图10所示,在第二印刷动作中,管道810沿着第一面wf1而被配置,以对未喷落在第二面wf2上而是越过假想面fv2而漂浮的油墨滴进行回收。
137.在此,回收机构800能够进行移动,且第一印刷动作中的管道810的位置以及姿态与第二印刷动作中的管道810的位置以及姿态互不相同。如此,通过使回收机构800根据由液体喷出头310形成的印刷区域而进行移动,从而能够在防止回收机构800的大型化的同时,利用回收机构800而有效地对未喷落在工件w上而是飞散了的油墨滴进行回收。回收机构800的移动并未被特别限定,例如既可以通过将管道810固定于液体喷出头310来实施,也可以使用通过与机械臂200不同的机构来使管道810移动的致动器等机构。此外,也可以在第一印刷动作中或第二印刷动作中,根据液体喷出头310的位置或姿态的变化来对回收机构800的位置或姿态进行变更。
138.3.第三实施方式
139.以下,对本发明的第三实施方式进行说明。在以下所例示的方式中,对于作用或功能与第一实施方式同样的要素而沿用在第一实施方式的说明中所使用的符号,并适当地省略各自的详细说明。
140.图11为用于对第三实施方式的第三印刷动作进行说明的图。在本实施方式中,除了不仅使用第一印刷动作而且还使用第三印刷动作来实施对于第一面wf1的印刷以外,均与前文所述的第一实施方式相同。
141.如图11所示,第三印刷动作通过在使液体喷出头单元300沿着第一面wf1而从位置p0向位置p1a移动的同时使油墨从液体喷出头310喷出,从而在包括第一面wf1的区域在内的区域re1上实施印刷。
142.位置p0为与位置p1a相比而更远离第二面wf2的位置。位置p1a为,在对第一面wf1进行俯视观察时与位置p1重叠且与位置p1相比而更远离第一面wf1的位置。
143.在第三印刷动作中,控制装置600以使喷嘴面f相对于第一面wf1而平行的方式,来
对机械臂200的驱动进行控制,。在图11中,图示了对作为第三印刷动作中的液体喷出头310相对于工件w的移动方向的一个示例的扫描方向ds3。
144.如上文所述,控制装置600执行在并不使喷嘴面f相对于第一面wf1而倾斜的状态下对第一面wf1实施印刷的第三印刷动作。在第三印刷动作中,第一端e1与第一面wf1之间的距离l11和第二端e2与第一面wf1之间的距离l12相等。即,在第三印刷动作中,作为喷嘴面f的法线矢量的第三喷出矢量vd3和第一面wf1的法线矢量相互平行或一致。因此,在第三印刷动作中,由于从液体喷出头310被喷出的油墨的方向相对于第一面wf1而正交,因此与第一印刷动作相比,即使提高印刷速度,也将易于提升印刷品质。因此,通过同时使用第一印刷动作和第三印刷动作,从而能够跨及包括角wc在内的范围而对第一面wf1高速地实施高画质的印刷。
145.此外,当在第一面wf1上实施印刷时液体喷出头310与第二面wf2之间的距离d为预定距离dth以上的情况下,控制装置600执行第三印刷动作。此外,在距离d小于预定距离dth的情况下,控制装置600执行第一印刷动作。如此,通过根据距离d是否为预定距离dth以上来对第一印刷动作和第三印刷动作进行切换,从而能够连续地实施第一印刷动作和第三印刷动作。
146.在此,优选为缩小第一印刷动作中的距离wg与第三印刷动作中的距离wg之差,更优选为使第一印刷动作中的距离wg与第三印刷动作中的距离wg彼此相等。在这种情况下,与并非如此的情况相比,而具有易于使画质等在第一印刷动作和第三印刷动作中一致这样的优点。
147.在图11所示的示例中,在距离d成为预定距离dth的位置处使液体喷出头310的姿态以及距离wg发生变化。但是,也可以在第一印刷动作中,在距离d小于预定距离dth的位置处使液体喷出头310的姿态和距离wg连续地或阶段性地发生变化。
148.另外,虽然在本实施方式中对第三印刷动作对第一面wf1实施印刷的方式进行了例示,但是同样地也可以在不使喷嘴面f相对于第二面wf2而倾斜的状态下对第二面wf2实施印刷。在这种情况下,喷嘴面f的法线矢量和第二面wf2的法线矢量相互平行或一致。此外,在这种情况下,根据液体喷出头310与第一面wf1之间的距离,来对第二印刷动作和第三印刷动作进行切换。
149.4.变形例
150.以上所例示的各方式可以进行多种多样的变形。在下文中,对可应用于前文所述的各个方式中的具体的变形方式进行例示。另外,从以下的示例中被任意地选出的两种以上的方式可以在相互不矛盾的范围内适当地进行合并。
151.4-1.变形例1
152.图12为用于对变形例1中的第一印刷动作进行说明的图。图13为用于对变形例1中的第二印刷动作进行说明的图。变形例1除了液体喷出头310的移动方向为与第一实施方式相反的方向以外,均与第一实施方式相同。
153.在变形例1中,如图12所示,控制装置600在第一印刷动作中使液体喷出头310相对于工件w而向从第二面wf2远离的方向、即x2方向进行相对移动。此外,如图13所示,控制装置600在第二印刷动作中使液体喷出头310相对于工件w而向靠近第一面wf1的方向、即x1方向进行相对移动。当在第二印刷动作之后接着实施第一印刷动作的情况下,通过使液体喷
出头310在这样的方向上进行移动,从而能够对第一面wf1以及第二面wf2进行连续的印刷。通过以上的变形例1,也可以获得与前文所述的第一实施方式同样的效果。
154.另外,对于第二实施方式至第三实施方式,也可以将第一印刷动作、第二印刷动作以及角度调节动作等各动作中的液体喷出头310的移动方向设为与前文所述的方向相反的方向。
155.此外,也可以对变形例1中的第一印刷动作和第一实施方式的第二印刷动作进行组合,还可以对第一实施方式的第一印刷动作和变形例1中的第二印刷动作进行组合。并且,也可以将第二实施方式至第四实施方式中的任意一方的旋转动作、或者第三印刷动作适当地组合到上述的组合的任意一种中。
156.4-2.变形例2
157.虽然在前文所述的方式中对第一面以及第二面在相互正交的方向上扩大的情况进行了例示,但是第一面以及第二面并不限定于这种情况,例如只需在于45
°
以上且135
°
以下的范围内、优选为60
°
以上且120
°
以下的范围内相互交叉的方向上扩大即可。此外,虽然在前文所述的方式中对第一面以及第二面各自为平面的情况进行了例示,但是并不限定于此,例如也可以使第一面或第二面的整体平缓地屈曲或弯曲,或者在第一面或第二面上设置细微的凹凸。该凹凸中的凸部的高度或凹部的深度例如与前文所述的距离wg相比而较小。具有该凹凸的第一面或第二面也可以理解为近似于平坦的面。
158.在第一面或第二面平缓地屈曲或弯曲的情况下,为了将距离wg保持为恒定,而使第一印刷动作、第二印刷动作中的液体喷出头310的移动采用根据第一面或第二面的屈曲或弯曲而进行了屈曲或弯曲的轨迹。在这种情况下,第一扫描轴、第二扫描轴可以理解为,沿着进行了屈曲或弯曲的轨迹下的移动量的总和最大的方向的轴。
159.4-3.变形例3
160.虽然在前文所述的方式中作为移动机构而对使用六轴的垂直多轴机械臂的结构进行了例示,但是并不限定于该结构。移动机构只需能够使液体喷出头的相对位置以及姿态相对于工件而三维地发生变化即可。因此,移动机构例如也可以为六轴以外的垂直多轴机械臂,还可以为水平多轴机械臂。此外,机械臂所具有的可动部并不限定于转动机构,例如也可以为伸缩机构等。此外,虽然在前文所述的方式中对使液体喷出头移动的结构的移动机构进行了例示,但是并不限定于该结构,例如也可以为如下结构,即,液体喷出头的位置被固定,且移动机构使工件移动,从而使工件的相对位置以及姿态相对于液体喷出头而三维地发生变化的结构。
161.4-4.变形例4
162.虽然在前文所述的方式中对使用一种油墨来实施印刷的结构进行了例示,但是并不限定于该结构,也能够将本发明应用于使用两种以上的油墨来实施印刷的结构中。
163.4-5.变形例5
164.本发明的立体物印刷装置的用途并不限定于印刷。例如,喷出颜色材料的溶液的立体物印刷装置作为形成液晶显示装置的滤色器的制造装置而被利用。此外,喷出导电材料的溶液的立体物印刷装置作为形成配线基板的配线或电极的制造装置而被利用。
165.符号说明
166.100
…
立体物印刷装置;200
…
机械臂(移动机构);310
…
液体喷出头;330
…
位移传
感器;800
…
回收机构;810
…
管道;as1
…
第一扫描轴;as2
…
第二扫描轴;d
…
距离;dc1
…
成分;dc2
…
成分;ds1
…
扫描方向;ds2
…
扫描方向;ds3
…
扫描方向;dth
…
预定距离;e1
…
第一端;e2
…
第二端;f
…
喷嘴面;fv1
…
假想面;fv2
…
假想面;l1
…
第一喷嘴列;l11
…
距离;l12
…
距离;l2
…
第二喷嘴列;l21
…
距离;l22
…
距离;n
…
喷嘴;re
…
区域;re1
…
区域;re2
…
区域;vd1
…
第一喷出矢量;vd2
…
第二喷出矢量;vd3
…
第三喷出矢量;w
…
工件;wc
…
角;wf1
…
第一面;wf2
…
第二面;wg
…
距离;θ1
…
角度;θ2
…
角度;θa
…
倾斜角度;θb
…
倾斜角度;θc
…
角度。