1.本发明涉及平衡支架领域,具体是一种电动平衡装置和平衡方法。
背景技术:
2.现有的电动平衡装置,如云台,在使用时将摄像头放置在云台上,利用电机和传感器保持摄像头水平。但是现有的电动平衡装置只能保持摄像头水平,如果任意调节一个稳定角度,在放置其他测量设备时会受到限制。
技术实现要素:
3.有鉴于此,本发明的目的是提供一种电动平衡装置和平衡方法,能够任意调节稳定角度,并在使用过程中将对应的设备自动保持特定角度,使得测量仪器能够以特定角度保持稳定。
4.本发明的一种电动平衡装置,包括底座、多个电缸、平台和控制电路,平台设置在底座上方,多个电缸围绕平台呈圆周均匀分布,电缸的两端分别与底座的边缘和平台的边缘铰接,底座与平台平行时,多个电缸的与底座或者平台的夹角均相同;控制电路包括电机控制电路和主控制器,电机控制电路与主控制器和多个电缸连接,平台上设有陀螺仪,陀螺仪与主控制器连接。
5.进一步地,所述电缸的数量为偶数且大于2个,所述平台和底座均为水平状态时,所述电缸的伸长量为伸长总量的二分之一。
6.进一步地,所述陀螺仪为三轴陀螺仪、六轴陀螺仪或者九轴陀螺仪。
7.本发明还提供一种电动平衡方法:包括步骤:
8.s1、确定初始位置,利用陀螺仪记录平台与水平面相比的倾斜角和倾斜方向;
9.s2、当底座发生运动时,在时间t内通过陀螺仪确定时间t内的平台的运动方向,将平台的运动方向分解至各个电缸;控制电缸进行收缩运动,将分解至电缸的运动量予以补偿。
10.进一步地,所述步骤s1中所述平台的倾斜方向即为所述平台台面的法线,平台的法线通过所述陀螺仪获取。
11.进一步地,所述步骤s2中,各个所述电缸的运动量补偿过程具体包括:
12.s201、建立坐标系,以平台中心为坐标原点,坐标原点距离所有的电缸的顶端的距离均相同;
13.s202、将两个相对设置的电缸作为一组调节电缸,将同一组中顶部上升的电缸进行收缩控制,将同一组中顶部下降的电缸进行伸展控制,同一组中的电缸伸长和收缩速度一致,直至陀螺仪感应到平台的法线与初始法线一致。
14.本发明的有益效果是:本发明的一种电动平衡装置和平衡方法,通过平台对测量装置进行承载,平台的边缘设置多个电缸与底部的底座连接,通过控制电缸的伸缩来控制平台的倾斜角度,平台上设有陀螺仪。通过陀螺仪检测平台的三个角度,类似飞机飞行控制
过程;控制空间三轴角度欧拉角分为仰俯角、横滚角、航向角,用陀螺仪的角度与加速度积分,测量运动控制过程的角度,从而实现角度的检测和平衡控制并通过控制电路控制电缸,通过电缸的伸缩控制对电缸的运动过程中的位置变化进行补偿,从而使得平台保持原有的倾斜状态;本发明可以通过调节电缸的长度,使得承载测量装置的平台一致保持一定角度的姿态,弥补了现有云台只能保持水平的不足。
附图说明
15.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它相关的附图:
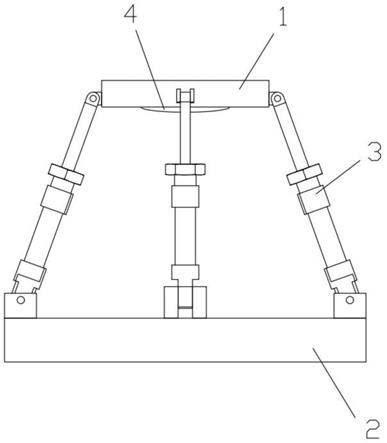
16.图1为本发明的正视结构示意图;
17.图2为本发明的俯视结构示意图;
18.图3为本发明的控制结构示意图;
19.附图标记如下:1-平台、2-底座、3-电缸、4-陀螺仪。
具体实施方式
20.如图1-图3所示:本实施例的一种电动平衡装置,包括底座、多个电缸、平台1和控制电路,平台1设置在底座2上方,多个电缸3围绕平台1呈圆周均匀分布,电缸3的两端分别与底座2的边缘和平台1的边缘铰接,底座2与平台1平行时,多个电缸3的与底座2或者平台1的夹角均相同;控制电路包括电机控制电路和主控制器,电机控制电路与主控制器和多个电缸3连接,平台1上设有陀螺仪4,陀螺仪4与主控制器连接。电缸3内部由电机和丝杆组件组成,由控制电路控制电机转动,带动丝杆组件,丝杆组件中与丝杆螺纹配合使得执行部件直线运动。陀螺仪为电子陀螺仪,通过iic接口导出数据至主控制器中,从而获得平台的姿态信息。
21.具体地,底座2和平台1均为圆形,陀螺仪4安装在平台1下方圆心位置,陀螺仪4与所有的电缸3的顶端距离相同且距离恒定,均为平台1的半径;电缸3的数量为偶数且大于2个;本实施例中为4个电缸3,相对位置的电缸3连线呈十字形;平台1和底座2均为水平状态时,电缸3的伸长量为伸长总量的二分之一,从而保证电缸3在大部分时候都有足够的伸缩量;
22.具体地,陀螺仪为三轴陀螺仪、六轴陀螺仪或者九轴陀螺仪。
23.主控制器采用dsp+fpga的控制器组合,控制电路利用旋变解码器采集电缸3内部电机的角动量,同时利用电流传感器采集电机的端子电流信号,根据角动量和电流信号完成对电机和电缸3的闭环控制,实现精确控制。
24.本发明还提供一种电动平衡方法:包括步骤:
25.s1、确定初始位置,利用陀螺仪4记录平台1与水平面相比的倾斜角和倾斜方向;倾斜方向即为平台1台面的法线,平台1的法线通过陀螺仪4获取;
26.s2、当底座2发生运动时,在时间t内通过陀螺仪4确定时间t内的平台1的运动方向,将平台1的运动方向分解至各个电缸3;控制电缸3进行收缩运动,将分解至电缸3的运动
量予以补偿;初始位置的法线为初始法线,当装置整体位置发生变化,平台1产生倾斜时,法线倾斜会产生新的法线,如果想要使得平台1的倾斜角度复位至初始的角度,则需要使得平台1的法线与初始法线重合,同时为了使得平台1的反应足够块,陀螺仪4的姿态信息采集时间间隔t在50-100ms之间,具体地,
27.s201、建立坐标系,以平台1中心为坐标原点,坐标原点距离所有的电缸3的顶端的距离均相同;
28.s202、在步骤s2中,当平台1的姿态发生变化时,各个电缸3的顶部的高度发生变化,对应地平台1边缘的高度发生变化,从而使得平台1的法线发生变化,想要平台1恢复姿态,需要恢复电缸3之间的高度差;因此,将两个相对设置的电缸3作为一组调节电缸3,即位于同一个二维坐标系的电缸3作为一组;将同一组中顶部上升的电缸3进行收缩控制,将同一组中顶部下降的电缸3进行伸展控制,使得电缸3之间的高度差恢复至原有的高度差,由于以平台1的圆心为参考系,因此同一组中的电缸3的运动幅度应该是一致的,因此同一组中的电缸3伸长和收缩速度一致,两组电缸3同时调节,直至陀螺仪4感应到平台1的法线与初始法线一致即可;
29.综上所述,通过平台对测量装置进行承载,平台的边缘设置多个电缸与底部的底座连接,通过控制电缸的伸缩来控制平台的倾斜角度,平台上设有陀螺仪。通过陀螺仪检测平台的三个角度,类似飞机飞行控制过程;控制空间三轴角度欧拉角分为仰俯角、横滚角、航向角,用陀螺仪的角度与加速度积分,测量运动控制过程的角度,从而实现角度的检测和平衡控制并通过控制电路控制电缸,通过电缸的伸缩控制对电缸的运动过程中的位置变化进行补偿,从而使得平台保持原有的倾斜状态;本发明可以通过调节电缸的长度,使得承载测量装置的平台一致保持一定角度的姿态,弥补了现有云台只能保持水平的不足。
30.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。