1.本实用新型涉及无人机领域,具体涉及一种林地全景地图数据采集一体化装置。
背景技术:
2.以往林地的地图数据采集大多都只能依靠林业人员通过繁多的工具来进行测量测绘,采集数据,但是随着社会的发展,无人机的运用也越来越成熟,现在在林地数据采集中野越来越多的使用到无人机。
3.无人机,顾名思义是无人驾驶的飞机。从20世纪初飞机的诞生起,由于考虑到驾驶飞机的安全性,当时的人们就已经提出了无人驾驶飞机的想法。直至20世纪30年代,英国费雷尔公司将一架“女王”双固定翼飞机改造成无人靶机,开启了无人机进入航空史的序幕。
4.但是目前的无人机为了能保证飞行的稳定性,对重量的控制,会控制电池的大小,这样就会造成无人机续航时间偏短的问题,传统的无人机电池大多都不可拆卸,这样就意味着无人机在进行短暂的数据采集工作后,就需要进行充电,这样造成数据采集效率底下的问题。
技术实现要素:
5.本实用新型的目的在于提供一种林地全景地图数据采集一体化装置,解决以往林地数据采集使用的无人机续航时间短,电池不可拆卸,导致数据采集效率低下的问题。
6.为解决上述的技术问题,本实用新型采用以下技术方案:
7.一种林地全景地图数据采集一体化装置,包括无人机、激光雷达传感器、摄像机和电池部,电池部用于对无人机、激光雷达传感器和摄像机进行供电,无人机的下侧连接有连接杆,连接杆通过第一锁紧件固定激光雷达传感器,通过第二锁紧件固定摄像机,无人机的前侧设置有电池槽,电池部可拆卸设置于电池槽内,无人机前侧设置有用于锁紧电池部和电池槽之间连接的第三锁紧件。
8.进一步的技术方案是,第一锁紧件包括第一夹持部和第二夹持部,第一夹持部和第二夹持部均通过推动件相互靠拢,用以夹持固定激光雷达传感器。
9.更进一步的技术方案是,连接杆上连接有第一连接块,第一连接块的一端和连接杆相连,另一端设置有转动槽,第一夹持部通过第一转动轴和转动槽的槽壁转动相连,第二夹持部在第一夹持部的下方通过第二转动轴和转动槽的槽壁转动相连,推动件包括第一推动结构和第二推动结构,第一推动结构在第一转动轴的上方推动第一夹持部的外侧,以使第一夹持部的内侧朝向第二夹持部靠拢,第二推动结构在第二转动轴的下方推动第二夹持部的外侧,以使第二夹持部的内侧朝向第一夹持部靠拢。
10.更进一步的技术方案是,第一推动结构包括推动柱和第一弹簧,转动槽的槽底设置有弹性槽,第一弹簧的一端和弹性槽的槽底相连,另一端在弹性槽内和推动柱的一端相连,推动柱的另一端在第一转动轴的上方滑动贴合于第一夹持部的外侧。
11.更进一步的技术方案是,第一夹持部的内侧设置有第一固定层,第二夹持部的内
侧设置有第二固定层,第一固定层和第二固定层均与激光雷达传感器的表面贴合固定。
12.更进一步的技术方案是,第三锁紧件包括锁紧柱、拨动板和第二弹簧,电池槽的槽壁上设置有滑动槽,电池部的侧面设置有锁紧槽,第二弹簧的一端和滑动槽的槽底相连,另一端在滑动槽内和锁紧柱的一端相连,锁紧柱的另一端穿出滑动槽,并且卡设于锁紧槽内,无人机的前侧设置有和滑动槽槽壁相连通的连通孔,连通孔内滑动设置有滑动杆,滑动杆的一端穿进滑动槽内和锁紧柱相连,另一端穿出连通孔,并且在无人机的前侧和拨动板相连。
13.更进一步的技术方案是,电池部的前侧设置有拉手。
14.与现有技术相比,本实用新型的有益效果是:通过设置无人机、激光雷达传感器、摄像机和电池部,能够使电池部对无人机、激光雷达传感器和摄像机供电,这样能够使激光雷达传感器来采集林地的全景地图数据,以及摄像机来拍摄全景图像。通过设置电池槽和第三锁紧装置,能够使电池部稳定的安装在电池槽内,同时也便于更换电池部,这样就能在电池部电能消耗完毕的时候,通过更换新的电池部来使无人机、激光雷达传感器和摄像机继续工作,解决了以往林地数据采集使用的无人机续航时间短,电池不可拆卸,导致数据采集效率低下的问题。
附图说明
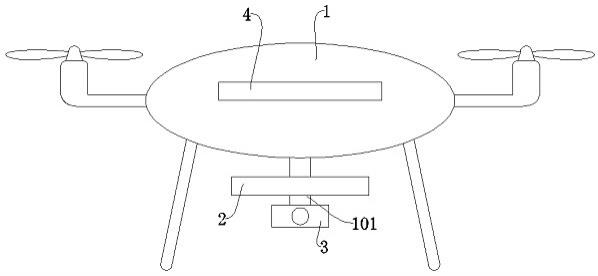
15.图1为本实用新型一种林地全景地图数据采集一体化装置的无人机示意图。
16.图2为本实用新型一种林地全景地图数据采集一体化装置的连接杆侧剖面示意图。
17.图3为本实用新型一种林地全景地图数据采集一体化装置的转动槽剖面示意图。
18.图4为本实用新型一种林地全景地图数据采集一体化装置的滑动槽剖面示意图。
19.图标:1-无人机,101-连接杆,102-第一夹持部,103-第二夹持部,104-第一连接块,105-转动槽,106-第一转动轴,107-第二转动轴,108-推动柱,109-第一弹簧,110-弹性槽,111-第一固定层,112-第二固定层,113-第二连接块,114-连接槽,115-螺杆,116-转动板,117-滑动孔,118-螺纹槽,119-电池槽,120-锁紧柱,121-拨动板,122-第二弹簧,123-滑动槽,124-连通孔,125-滑动杆,2-激光雷达传感器,3-摄像机,4-电池部,401-锁紧槽,402-拉手。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
21.实施例:
22.图1至图4所示为本实用新型的一种实施方式。
23.一种林地全景地图数据采集一体化装置,包括无人机1、激光雷达传感器2、摄像机3和电池部4,电池部4用于对无人机1、激光雷达传感器2和摄像机3进行供电,无人机1的下侧连接有连接杆101,连接杆101通过第一锁紧件固定激光雷达传感器2,通过第二锁紧件固定摄像机3,无人机1的前侧设置有电池槽119,电池部4可拆卸设置于电池槽119内,无人机1
前侧设置有用于锁紧电池部4和电池槽119之间连接的第三锁紧件。通过设置无人机1、激光雷达传感器2、摄像机3和电池部4,能够使电池部4对无人机1、激光雷达传感器2和摄像3机供电,这样能够使激光雷达传感器2来采集林地的全景地图数据,以及摄像机3来拍摄全景图像。通过设置电池槽119和第三锁紧装置,能够使电池部4稳定的安装在电池槽119内,同时也便于更换电池部4,这样就能在电池部4电能消耗完毕的时候,通过更换新的电池部4来使无人机1、激光雷达传感器2和摄像机3继续工作,解决了以往林地数据采集使用的无人机续航时间短,电池不可拆卸,导致数据采集效率低下的问题。激光雷达传感器2在目前已经有了一定程度的发展,市面上有很多种型号的激光雷达传感器2可供选择,其中激光雷达是一种遥感技术,使用脉冲激光束扫描环境,并测量从物体反射回探测器的信号的反射时间。通过测量计算可以得到地形地貌的雷达图。同时还可以测量出植被的覆盖率之类的数据。通过摄像机3,能够更加直观的对整片区域进行勘探。在实际使用过程中,可以携带多个电池部4,这样就能仅仅通过更换电池部4就能解决无人机1的续航问题。将激光雷达传感器2和摄像机3所采集的数据、图像等资料进行处理,就可以得到林地的全景地图。
24.第一锁紧件包括第一夹持部102和第二夹持部103,第一夹持部102和第二夹持部103均通过推动件相互靠拢,用以夹持固定激光雷达传感器2。这样的设置,一方面可以通过第一夹持部102和第二夹持部103相配合将激光雷达传感器2固定在连接杆101上,从而通过无人机1带着激光雷达传感器2到空中进行工作。
25.连接杆101上连接有第一连接块104,第一连接块104的一端和连接杆101相连,另一端设置有转动槽105,第一夹持部102通过第一转动轴106和转动槽105的槽壁转动相连,第二夹持部103在第一夹持部102的下方通过第二转动轴107和转动槽105的槽壁转动相连,推动件包括第一推动结构和第二推动结构,第一推动结构在第一转动轴106的上方推动第一夹持部102的外侧,以使第一夹持部102的内侧朝向第二夹持部103靠拢,第二推动结构在第二转动轴107的下方推动第二夹持部103的外侧,以使第二夹持部103的内侧朝向第一夹持部102靠拢。这样的设置,当需要安装激光雷达传感器2的时候,通过分别向上和向下用力分开第一夹持部102和第二夹持部103,然后将激光雷达传感器2放入到第一夹持部102和第二夹持部103之间,然后第一夹持部102借助第一推动结构的推力围绕第一转动轴106朝向第二夹持部103转动,第二夹持部103借助第二推动结构的推力围绕第二转动轴107朝向第一夹持部102转动,这样就能将激光雷达传感器2稳定的夹持固定住。同时,这样的设置也便于操作人员在需要更换、维修和检查的时候将激光雷达传感器2从第一夹持部102和第二夹持部103之间取出。
26.第一连接块104可以在连接杆101的两侧平行设置来连接第一锁紧件,从而更加稳定的固定住激光雷达传感器2。第一推动结构包括推动柱108和第一弹簧109,转动槽105的槽底设置有弹性槽110,第一弹簧109的一端和弹性槽110的槽底相连,另一端在弹性槽110内和推动柱108的一端相连,推动柱108的另一端在第一转动轴106的上方滑动贴合于第一夹持部102的外侧。这样的设置,当用力分开第一夹持部102和第二夹持部103的时候,第一夹持部102的外侧推动推动柱108压缩第一弹簧109,从而使第一夹持部102围绕第一转动轴106转动,从而远离第二夹持部。第一弹簧109可以根据实际情况来选择,以便于提供合适大小的弹力,这样能保证第一夹持部102和第二夹持部103将激光雷达传感器2固定住,避免在使用过程中激光雷达传感器2发生脱落。第二推动结构可以和第一推动结构的设置方式相
同。
27.第一夹持部102的内侧设置有第一固定层111,第二夹持部103的内侧设置有第二固定层112,第一固定层111和第二固定层112均与激光雷达传感器2的表面贴合固定。通过设置第一固定层111和第二固定层112,能够提高和激光雷达传感器2之间的摩擦力,从而提升第一夹持部102和第二夹持部103对激光雷达传感器2夹持固定的牢固度。第一固定层111和第二固定层112可以选择橡胶或者类似的高摩擦力材质,同时还具有一定的弹性。
28.摄像机3上设置有第二连接块113,连接杆101上设置有连接槽114,第二连接块113卡设于连接槽114内,第二锁紧件用于锁紧连接槽114和第二连接块113之间的连接。通过设置第二连接块113和连接槽114,提升了摄像机3和连接杆101连接的牢固度。
29.第二锁紧件包括螺杆115和转动板116,连接杆101远离连接槽114的一侧设置有和连接槽114槽底相连通的滑动孔117,第二连接块113朝向滑动孔117的一侧设置有螺纹槽118,螺杆115滑动设置于滑动孔117内,并且一端穿出滑动孔117,在连接杆101的侧面和转动板116相连,螺杆115的另一端穿进连接槽114,在连接槽114内和螺纹槽118螺纹咬合。这样的设置,当第二连接块113卡设进连接槽114以后,通过将螺杆115从滑动孔117穿进连接槽114内,然后继续进入到螺纹槽118 ,通过旋转转动板116来将螺杆通过螺纹咬合进入到螺纹槽118内,然后旋转至转动板116与连接杆101贴合在一起将第二连接块113固定在连接槽114内。
30.第三锁紧件包括锁紧柱120、拨动板121和第二弹簧122,电池槽119的槽壁上设置有滑动槽123,电池部4的侧面设置有锁紧槽401,第二弹簧122的一端和滑动槽123的槽底相连,另一端在滑动槽123内和锁紧柱120的一端相连,锁紧柱120的另一端穿出滑动槽123,并且卡设于锁紧槽401内,无人机1的前侧设置有和滑动槽123槽壁相连通的连通孔124,连通孔124内滑动设置有滑动杆125,滑动杆125的一端穿进滑动槽123内和锁紧柱120相连,另一端穿出连通孔124,并且在无人机1的前侧和拨动板121相连。这样的设置,当需要更换电池部4的时候,通过拨动拨动板121远离电池部4,这样就能使拨动板121通过滑动杆125带动锁紧柱120从锁紧槽401内缩回到滑动槽123内,这样就能便于从电池槽119内取出电池部4。在放入电池部4的时候,通过拨动拨动板121使锁紧柱120保持在滑动槽123内,然后将电池部4放入到电池槽119内,松开拨动板121,通过第二弹簧122的弹力使锁紧柱120和锁紧槽保持锁紧状态。
31.电池部4的前侧设置有拉手402。通过设置拉手402,便于拿去电池部4。
32.尽管这里参照本实用新型的多个解释性实施例对本实用新型进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。更具体地说,在本技术公开、附图和权利要求的范围内,可以对主题组合布局的组成部件和/或布局进行多种变型和改进。除了对组成部件和/或布局进行的变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。