1.本实用新型涉及一种仿生扑翼机构,尤其涉及一种单自由度驱动仿蜻蜓复翼扑翼机构。
背景技术:
2.在近二十年的发展中,扑翼飞行器领域已经涌现数种扑翼飞行器样机。然而关于复翼飞行器的研究还非常少,目前技术验证成熟的只有法国festo企业的仿生蜻蜓bionicopter。仿生蜻蜓bionicopter具有多于10个自由度,具有独立移动每个机翼的能力,可以使其减速或突然转弯,快速加速甚至向后飞,以及在空中往任何方向飞行亦或是盘旋,但是其扑翼规律与蜻蜓相差很远,且需要多个伺服电机控制。
技术实现要素:
3.本实用新型实施例所要解决的技术问题在于,提供一种单自由度驱动仿蜻蜓复翼扑翼机构。可通过一个电机驱动就可以实现两对翅膀的扑动扭转的复合运动,与蜻蜓飞行方式高度相似,具有高度的仿生性。
4.为了解决上述技术问题,本实用新型实施例提供了一种单自由度驱动仿蜻蜓复翼扑翼机构,包括支架、电机、依次转动设置于所述支架上的第一至第四主摆机构、辅摆机构、曲轴,所述曲轴转动设置于所述支架内,所述第一至第四主摆机构均包括相对啮合的第一、第二扇齿,所述第一、第二扇齿转动设置于所述支架上,且具有摆动柄部,所述摆动柄部与所述辅摆机构联动连接,所述第一、第二扇齿至少其一具有联动柄部,所述联动柄部具有滑槽,所述滑槽与所述曲轴联动配合,所述电机与所述曲轴联动配合。
5.其中,所述曲轴上具有3个不同相位的连杆轴颈,并分别与第二至第四主摆机构联动配合。
6.其中,所述辅摆机构包括与所述支架转动连接的第一摆头、第二摆头,所述第一摆头、第二摆头的侧面均具有辅摆滑槽,所述摆动柄部通过导杆与所述辅摆滑槽滑动配合,所述第一摆头、第二摆头具有安装座,且其一个上转动设置有u形的联动座,另一个上转动设置有转头,所述转头通过联动轴与所述联动座配合。
7.其中,所述第一摆头、第二摆头分别设置于所述第一至第四主摆机构中相临的扇齿之间。
8.其中,所述曲轴一端固定设置有从动齿轮,所述电机输出端固定设置有主动齿轮,并与所述从动齿轮啮合连接。
9.其中,所述从动齿轮具有偏心轴,位于与所述从动齿轮同侧上的第一扇齿或第二扇齿上的联动柄部的滑槽与所述偏心轴滑动配合。
10.实施本实用新型实施例,具有如下有益效果:本实用新型通过改变设计的曲柄间的角度改变两对翅膀扑动相位差,以一个电机驱动实现两对翅膀的扑动扭转的复合运动,并与蜻蜓飞行方式高度相似,具有高度的仿生性。
附图说明
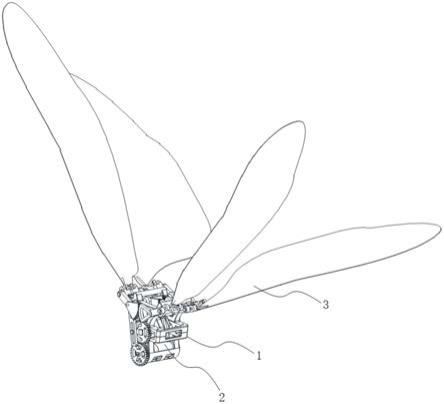
11.图1是本实用新型的整体结构示意图;
12.图2是本实用新型主要结构的整体结构示意图之一;
13.图3是本实用新型主要结构的整体结构示意图之二。
具体实施方式
14.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述。
15.参照图1、2、3所示的结构示意图。
16.本实用新型实施例的一种单自由度驱动仿蜻蜓复翼扑翼机构,包括了支架1、电机2、翼3、第一至第四主摆机构4、5、6、7、辅摆机构8、曲轴9。
17.曲轴9横向贯穿过支架1,并形成转动连接,支架底部设置有电机2的安装座,电机2安装于其中,且输出端固定设置有主动齿轮21,在其同侧上,曲轴9的一端上固定设置有与主动齿轮21啮合的从动齿轮91。
18.第一至第四主摆机构4、5、6、7沿曲轴9的长度方向依次设置,第一至第四主摆机构均为相同结构,以第一主摆机构进行说明,其包括相对啮合的第一扇齿41、第二扇齿42,第一扇齿41、第二扇齿42的中部通过销轴转动设置于支架1上,且与扇齿反向的一端具有摆动柄部43、44,第一扇齿41、第二扇齿42至少其一具有联动柄部45,在本实施例中,优选为第一扇齿41下方设置有联动柄部45,联动柄部45具有滑槽451,从动齿轮91的齿轮面上设置有偏心轴,偏心轴滑动设置于滑槽451中,以使得第一扇齿41产生摆动,曲轴9上具有3个不同相位的连杆轴颈,第二至第三主动机构5、6、7中的联动柄部则与对应的连杆轴颈滑动连接,并且具有不同的转动相位。
19.辅摆机构8包括与支架1转动连接的第一摆头81、第二摆头82,第一摆头81、第二摆头82的侧面均具有辅摆滑槽83、84,摆动柄部43、44通过导杆与辅摆滑槽83、84滑动配合,第一摆头81、第二摆头82均具有安装座85、86,且其底部与支架1转动连接,在本实施例中,优选的是安装座86上转动设置有转头87,另一个上转动设置有u形的联动座88,所述转头87上插设有翼部,翼部通过横杆与u形的联动座88联动,从而实现摆动的同时实现扭摆。
20.第一摆头81、第二摆头82分别设置于第一至第四主摆机构中相临的扇齿之间,从而实现在一侧上形成2组扭摆,以实现主翼与副翼的扑动,以实现仿生扑翼的动作。
21.在本实施例中,支架1为呈y形结构,电机2固定设置于其底部设置的安装座中,而从动齿轮91转动设置于支架1的侧面中部,曲轴9穿过支架1的中部。
22.实用新型在运行时,通过电机2驱动从动齿轮91,进而联动曲轴9旋转,以及其端部上的第一主摆机构4摆动,同时在曲轴9的带动下,使不同相位的第二至第四主摆机构5、6、7产生扭摆,而位于两个摆动机构之间的辅摆机构8则实现主翼与副翼的扑动,以实现仿生扑翼的动作,从而实现了仿蜻蜓扑翼的效果。本实用新型整体结构稳定可靠,在结构轻量化下实现了仿蜻蜓扑翼动作。
23.当然上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型主要技术方案的精神实质所做的修饰,都应涵盖在本实用新型的保
护范围之内。
技术特征:
1.一种单自由度驱动仿蜻蜓复翼扑翼机构,其特征在于,包括支架、电机、依次转动设置于所述支架上的第一至第四主摆机构、辅摆机构、曲轴,所述曲轴转动设置于所述支架内,所述第一至第四主摆机构均包括相对啮合的第一、第二扇齿,所述第一、第二扇齿转动设置于所述支架上,且具有摆动柄部,所述摆动柄部与所述辅摆机构联动连接,所述第一、第二扇齿至少其一具有联动柄部,所述联动柄部具有滑槽,所述滑槽与所述曲轴联动配合,所述电机与所述曲轴联动配合。2.根据权利要求1所述的单自由度驱动仿蜻蜓复翼扑翼机构,其特征在于,所述曲轴上具有3个不同相位的连杆轴颈,并分别与第二至第四主摆机构联动配合。3.根据权利要求2所述的单自由度驱动仿蜻蜓复翼扑翼机构,其特征在于,所述辅摆机构包括与所述支架转动连接的第一摆头、第二摆头,所述第一摆头、第二摆头的侧面均具有辅摆滑槽,所述摆动柄部通过导杆与所述辅摆滑槽滑动配合,所述第一摆头、第二摆头具有安装座,且其一个上转动设置有u形的联动座,另一个上转动设置有转头,所述转头通过联动轴与所述联动座配合。4.根据权利要求3所述的单自由度驱动仿蜻蜓复翼扑翼机构,其特征在于,所述第一摆头、第二摆头分别设置于所述第一至第四主摆机构中相临的扇齿之间。5.根据权利要求1-4任一项所述的单自由度驱动仿蜻蜓复翼扑翼机构,其特征在于,所述曲轴一端固定设置有从动齿轮,所述电机输出端固定设置有主动齿轮,并与所述从动齿轮啮合连接。6.根据权利要求5所述的单自由度驱动仿蜻蜓复翼扑翼机构,其特征在于,所述从动齿轮具有偏心轴,位于与所述从动齿轮同侧上的第一扇齿或第二扇齿上的联动柄部的滑槽与所述偏心轴滑动配合。
技术总结
本实用新型实施例公开了一种单自由度驱动仿蜻蜓复翼扑翼机构,包括支架、电机、依次转动设置于所述支架上的第一至第四主摆机构、辅摆机构、曲轴,所述曲轴转动设置于所述支架内,所述第一至第四主摆机构均包括相对啮合的第一、第二扇齿,所述第一、第二扇齿转动设置于所述支架上,且具有摆动柄部,所述摆动柄部与所述辅摆机构联动连接,所述第一、第二扇齿至少其一具有联动柄部,所述联动柄部具有滑槽,所述滑槽与所述曲轴联动配合,所述电机与所述曲轴联动配合。采用本实用新型,通过改变设计的曲柄间的角度改变两对翅膀扑动相位差,以一个电机驱动实现两对翅膀的扑动扭转的复合运动,并与蜻蜓飞行方式高度相似,具有高度的仿生性。性。性。
技术研发人员:张兴伟 陈永辉 张科 刘麒昊 李洁
受保护的技术使用者:汕头大学
技术研发日:2021.05.31
技术公布日:2021/12/17