使用无人驾驶飞行器(uav)能量来动画化创意表演元件的空中表演系统
技术领域
1.本说明书总体上涉及空中表演或展示,并且更具体地,本说明书涉及一种新的空中表演系统(和相关的操作方法),其适于利用无人驾驶飞行器(uav)的能量来激活和/或动画化创意表演效果设备或表演元件,以在uav飞行通过表演空域时产生动态表演效果。
背景技术:
2.存在大量对于在天空中提供表演或展示的新方法的需要。例如,这些表演和展示可以提供给参观主题或游乐园或在游轮上享受时光的人群。在其他情况下,在体育赛事之前或之后,甚至在中场休息或其他休息时,向体育迷提供空中展示或表演。
3.这些基于天空的或空中表演或展示中的许多完全依赖于定位在地面上的表演系统。例如,烟花或其他烟火表演可以涉及以编排的方式发动表演部件,在某些情况下,与音轨同步(例如,基于地面的音响系统的操作)。作为另一个示例,表演或展示可以涉及照亮头顶天空和/或屏幕和/或地面上或观众上方天空中的其他物体的光和/或激光表演。在其他情况下,表演或展示使用喷泉以动态方式投射水,这可以被编排并与音轨同步,并且照明通常用于照亮投射的水。
4.最近,表演和展示设计师开始尝试使用无人驾驶飞行器(uav)或无人机,诸如四轴飞行器,但结果并没有满足表演和展示设计师的所有目标或需求。特别是,到目前为止,uav通常只是通过在空间上执行一组预编程的移动(例如,执行预定的飞行计划)来控制。其中一些uav已经被用于携带主题有效载荷或提升诸如离地投影屏幕的静态表演元件。较大的uav具有更强的气流下洗力,因为它们强大的旋翼会导致有效载荷向湍流空气的不期望的移动,并且表演设计师通常通过选择更刚性的表演元件或更具渗透性的材料来限制气流下洗的影响来解决这个问题。
技术实现要素:
5.发明人认识到,需要提供一种方法来处理由来自uav旋翼(或推进和提升机构)的气流下洗提供的大的力。此外,发明人理解,发动用于空中动作的表演效果设备(或“表演元件”)通常需要基于地面的绞车和塔架系统。此外,将表演元件(例如人造雪或彩色纸屑)下落或分散在大面积上需要大量的基础设施,诸如表演空域内或附近的塔。
6.考虑到这些问题和其他问题,创建了一个空中表演系统,该系统采用多种方法来利用uav产生或提供的气流下洗和其他力(诸如运动移动或动能和势能)作为其本身的创意元件。空中表演系统中的uav各自包括一个推进和提升机构,该机构可能包括一个或多个旋翼或螺旋桨,并且推进和提升机构当其环绕表演空域在三个维度上移动uav底盘/主体时会生成气流下洗。空中表演系统还包括一对多表演效果设备或表演元件,其适于利用气流下洗(例如,其动能或湍流气流)来激活或动画化一个或多个可移动部件(或被配置为响应于被放置在uav的气流下洗中而动画的特征),以生成期望的表演效果(例如,uav底盘/主体下
方承载或系留的物体上的转动的螺旋桨或风扇)。
7.通常,可移动部件在其他情况下将是被动的(例如,不是由集成电机等内部致动),并且依赖于uav输出或创建的能量或力进行致动或动画。在其他情况下,uav的动能或其底盘/主体的移动被用来激活表演效果设备或表演元件,诸如向基于地面的表演元件提供能量以创建空中摇摆或发动,而不需要塔。在某些情况下,uav提供的势能或提升被用于向表演元件给予动画,诸如通过将元件下落,并且这可以通过来自气流下洗的能量来推进,这可以通过使用漏斗或其他设备以针对气流下洗能量或流过或靠近下落的表演元件(例如,人造雪、水流或水滴、彩色纸屑、促销品等)来增强。
8.更具体地,提供了适于用动画化的表演元件提供空中表演的系统。该系统包括带有底盘以及将该底盘移动到地面上方的一个或多个高度的提升和推进机构的无人驾驶飞行器(uav)。该系统还包括表演效果设备,该设备包括可致动部件,该可致动部件通常是被动的(或者对于任何移动不是自致动的)。在操作期间,表演效果设备与底盘耦接以与无人机一起移动通过空域,并且可致动部件通过由uav的底盘在空域中的移动而传递给表演效果设备的动能或势能的转换来致动。
9.在一些实施例中,动能由uav在空域中的三个维度上移动产生,并且势能由uav移动到地面上方的任何高度产生。飞行推进机构在uav在空域中操作期间生成气流下洗,并且可致动部件可空气动力学地耦接到气流下洗,从而其完全(不需要uav给予的动能或势能)或进一步由气流下洗致动。可致动部件在被气流下洗接触之前可以是静止的,并且可以包括空气动力学表面,该空气动力学表面将气流下洗转换成动力以致动表演效果设备的移动元件。
10.在一些实施例中,表演效果设备由底盘支撑,可致动部件包括从表演效果设备释放的多个粒子,并且气流下洗引起多个粒子的移动以实现表演效果。在这样的实施例中,表演效果设备还可以包括漏斗元件,该漏斗元件接收并重新引导气流下洗,以引导从表演效果设备释放的多个粒子的轨迹。在这些或其他实现方式中,颗粒可以是水滴,并且气流下洗使水滴扩散以形成投影表面,其中系统还包括将视频或光(例如,激光)投影到投影表面上的投影仪。
11.在某些情况下,表演效果设备物理地附接到底盘,悬挂在底盘上,或者在移动通过空域期间由uav拖曳。提升和推进机构在空域的空气中可以生成湍流,并且可致动部件的空气动力学表面将由空气中的湍流提供的能量转换成动画动力。表演效果设备可以定位在地面上,并且uav可以被控制以在可致动部件上方横越,以将来自提升和推进机构的气流下洗引导到可致动部件的表面上,从而致动可致动部件的移动。表演效果设备可以替代地耦接到底盘,并且可致动部件可以包括可操作以在从表演效果设备释放到空域中之后进行特技动作的物体。在这种实现方式中,在释放后uav的移动(动能)和/或uav在空域中的高度(势能)为完成特技动作提供发动条件。在一些有用的情况下,表演效果设备定位在地面上,并且可致动部件系留在底盘上并且适于使用动能来获得在空域中的提升、发动或摇摆移动。
附图说明
12.图1图示了根据本说明书的使用uav的能量来创建表演效果的空中表演系统的功能框图;
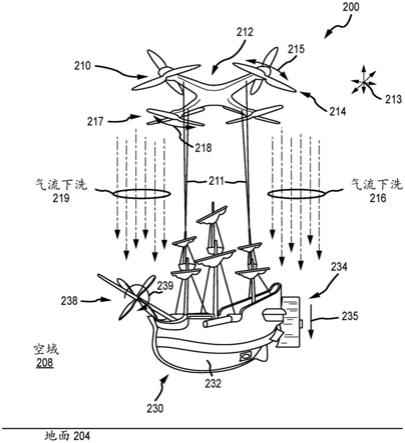
13.图2是本说明书的空中表演系统的一个示例性实现方式的下侧透视图,示出了使用气流下洗来使拖曳的表演效果设备动画化;
14.图3图示了本说明书的另一空中表演系统(例如,图1的系统的部分的实现方式),其使用uav来使用动能和势能以及气流下洗力的组合来动画化或激活表演效果设备;
15.图4图示了本说明书的空中表演系统(例如,图1的系统的部分的另一实现方式),其使用uav来使用其气流下洗来动画化或激活基于地面的表演效果设备;
16.图5图示了空中表演系统(例如,图1的系统的部分的实现方式),其示出了uav的使用以及它们输出或提供的能量,以实现附加的表演效果。
具体实施方式
17.简而言之,本文描述了一种系统,其特别适合于在下面(例如,在地面上)的一群观看者或观察者的上方或附近的天空或空间中提供表演或展示。该表演包括由表演元件或表演效果设备提供的一个或多个表演效果,该表演元件或表演效果设备利用一个或多个无人驾驶飞行器(uav)提供或输出的能量来生成表演效果。“能量”可以是uav将表演效果设备提升到地面上方某个高度时提供给表演效果设备的势能,或者可以是uav在地面上方的表演空域中的三个维度上移动时提供的动能。在一些优选实施例中,“能量”是由uav的提升和推进机构(例如,旋翼、螺旋桨等)产生的气流下洗中的力(或“气流下洗力”),并且表演效果设备包括一个或多个可移动或可致动部件,这些部件可以是静止的,直到暴露于来自uav的气流下洗,此时它们被致动或动画化以移动并提供表演效果(例如,使舞台立体布景的主题元件(诸如机器人)旋转或以其他方式移动,从而改善外观的逼真度)。
18.飞行器可以采用几乎任何被配置用于提升和/或承载更重负载的uav或无人机的形式,而其他实施例可以使用其他飞行器,使得“uav”(或“无人机”)旨在被理解为具有非常广泛的意义。在许多情况下,uav将配置有例如可安装表演效果设备的底盘或主体,或者表演效果设备可以被系留/耦接到底盘或主体以支撑在uav下方或后面。发明人预计,随着uav的尺寸和有效载荷提升能力由于技术进步而增加,它们同样会生成更强的气流下洗力,该气流下洗力可以被有效利用来创建新的和令人兴奋的表演效果,作为空中表演或展示的部分。
19.图1图示了使用本说明书的技术利用由uav 120提供或创建的能量的空中表演或展示系统100的功能框图。系统100包括uav(或无人机)120和机载表演组件150。uav 120被配置为支撑机载表演组件150(如虚线151所示),并以箭头125所示的三个维度在地面102上方的空间104中使其移动。(多个)uav 120可以采取多种形式来实现系统100。一般而言,uav 120可以是任何无人驾驶飞行器或物体,包括通过提升和推进机构124可移动或可推进通过空间104的飞行器,诸如使用螺旋桨的飞行器(诸如飞机型无人机以及使用l至6或更多个螺旋桨或旋翼的直升机型飞行器(诸如三翼飞机、四翼飞机)和飞行器),并且用于底盘/主体122(和支撑的表演组件150)的移动125的推进和提升由飞行推进机构(例如,马达和螺旋桨组合)124提供。
20.通常会选择uav 120是因为它能够支撑其自身重量,同时还能支撑机载表演组件150的重量(和飞行期间的阻力)。uav 120还包括电源128(例如一个或多个电池),以为uav 120的机构124和其他需要电力的部件的操作提供电力。提供传感器126以感测包括推进机
构124的uav 120的操作,并用于确定操作参数,诸如底盘/主体122的滚转、俯仰和偏航、底盘/主体122的速度(和某些情况下的方向)以及底盘/主体122在空间104中的位置/定位。箭头125还用于示出uav 120通过将其提升到地面102上方的某个高度向表演组件150提供势能,并通过其穿过空域104的移动向表演组件150(以及任何耦接/系留的199非机载物体198)提供动能。此外,如箭头127所示,提升和推进机构124在它们的操作期间生成气流下洗,并且如下所述,表演组件150和/或基于地面的表演元件196可被配置成利用气流下洗力(或空气湍流)来分别利用它们的可致动或可移动部件169和197创建独特的表演效果。
21.uav 120还包括(多个)处理器130,(多个)处理器130管理与基于地面的表演控制系统170的通信(通常是无线的),如箭头171所示。输入/输出(i/o)设备132是为此目的而提供的,并且可以包括无线收发器等,这在uav行业中是众所周知的。uav 120包括由处理器130管理的存储器/数据存储136,以及也由处理器130管理(或执行代码)的飞行控制器134(例如,硬件和软件)。飞行控制器134处理并执行存储在存储器中的飞行计划138,以用于在系统100的操作期间进行的特定表演/展示,并且配置和/或设置文件可以在计划138中提供或者单独地在存储器136中提供,配置和/或设置文件是每个平台110和每个表演/展示(例如,用于确定飞行控制器134和/或(例如具有数据166的)机载表演控制器156对表演环境动态反应的配置和/或设置)。
22.作为响应,飞行控制器134可以生成飞行控制信号135,该飞行控制信号135被提供或传送到飞行推进机构124,以使这些飞行推进机构124进行操作,从而以期望的速度沿着飞行路径将uav 110从一个位置移动125到下一个位置。信号135还可基于来自传感器126的输出来生成,诸如基于当前行进速度、方向和3d定向142和/或相对于表演飞行计划138中定义的期望的表演标记/定位和时间的空间104中的当前定位/位置144。进一步地或替代地,信号135可以由飞行控制器134基于从基于地面的表演控制系统170(如通信171所示)接收的飞行控制信号140和/或基于来自机载表演组件150和其控制软件模块/表演控制器156的输入而生成。
23.具有底盘122的uav 120容纳或支撑飞行推进机构124,能够在箭头125所示的三个维度上提升和/或移动。飞行控制器134设置在uav 120上以生成和/或接收飞行控制信号135和140,并且控制器134耦接到飞行推进机构124。机构124和/或传感器126进行操作以指示空间104中的绝对或相对定位144,并且飞行控制器134使得提升和推进机构124将uav底盘122移动125到由飞行控制信号135(和信号140)指示的位置,其中该位置通常在表演飞行计划138中定义。
24.机载表演组件150由uav 120支撑(如虚线151所示)以与uav 120一起移动125,这向组件150以及包括表演效果设备168的其部件给予势能和动能125。表演组件150包括处理器152,处理器152管理i/o设备154的操作以促进与非机载设备的通信,诸如与基于地面的表演控制系统170的通信171。处理器152还在本地存储器160中执行代码/指令或运行软件,以提供机载表演控制器或控制软件模块156的功能。
25.特别地,表演控制器156用于处理(多个)脚本或表演计划161以生成一组表演控制信号164,该一组表演控制信号164被传送到一个或多个表演效果设备190,以使它们的发动/释放机构191进行操作以释放或发动抛射物或粒子192(诸如彩色纸屑、人造雪、水流/粒子等),从而利用来自提升和推进机构124的提升和/或动能125和/或气流下洗127来创建特
定的表演效果。组件150包括与机构124、与传感器126和/或飞行控制器134的接口158,以允许组件150接收uav 120的飞行器控制状态信息165(例如,飞行速度、底盘定向(偏航、俯仰和滚转)等)、当前速度和行进方向142以及当前位置144。表演控制器156可从脚本/表演计划161生成定时/触发信号162和位置信号163,或从飞行控制器134或基于地面的表演控制系统170接收定时/触发信号162和位置信号163,这些信号可独立地或组合地用于创建表演控制信号164。
26.表演计划161可以包括两个或更多脚本(或新的表演片段的分支),其可以由表演控制器156基于定时信号162、位置信号163和/或飞行器控制状态信息165来动态地选择。以这种方式,可以操作表演效果设备190以在uav110的空间104中的预定的或动态地选择的定时和/或位置处提供期望的表演效果。表演控制器156还可以实时地为一个或多个表演效果设备生成替代的脚本。表演的预定义脚本/分支或(例如,实时替代的)表演的实时生成的脚本/分支可由表演控制器156基于实时数据来选择或创建,所述实时数据例如是可在来自传感器126的飞行器控制状态信息165中提供的uav的当前位置144、当前速度和行进方向142、和/或uav底盘122(以及因此,表演效果设备168、190)的当前方向。存储器160还可以存储表演配置166,该表演配置166通过模块156操作来配置平台110将如何处理所有信号并对其做出反应。
27.表演效果设备168、190的全部或子集可以设置在uav底盘122上,或者可以如虚线151所示以其他方式耦接/系留,诸如当uav 120移动125穿过空间104时,表演效果设备168、190的全部或子集定位在uav 120下方。表演效果设备168各自包括一个或多个可移动或可致动部件169,其使用气流下洗(例如,湍流空气或空气流)或气流下洗力127来移动或被动画化(例如,以如枢轴机翼或尾部摆动,以围绕旋转轴(例如螺旋桨、桨轮等)旋转,等等)。为此,表演效果设备168被支撑151,使得可移动部件169从期望方向(和/或接触部件169的期望表面)暴露于期望量的气流下洗127。
28.表演效果设备190可以包括发动和/或释放机构191,其响应于对表演控制信号164的接收来以一种或多种预定方式进行操作。在这点上,表演效果设备190包括一对多抛射物或粒子192,并且发动或释放机构191可以由表演控制信号164触发,以打开包含粒子192的容器中的闸或门,从而使粒子192被释放,并且由uav 120提供的势能和/或动能125激活或激励。此外,可在设备190中提供漏斗193,漏斗193可用于引导和/或聚集气流下洗127,以使气流下洗127将其能量给予所有或部分释放的粒子192。漏斗193还可用于将气流下洗127引导到非机载物体(例如系统100中的基于地面的表演元件196上的可移动和/或可致动部件197)上。表演效果设备168、190和基于地面的表演元件196可以采用各种形式来实现系统100,并且在一些情况下可以包括照明系统(例如,一对多的白色或彩色led、激光器、黑光灯等),该照明系统将光引导到可移动或可致动部件169、197或被释放和被激励的粒子192(其可以是被分布以在空间104中形成投影屏幕/表面的水或其他材料的粒子或液滴)上;具有播放设备和一个或多个扬声器的音响系统;用于创建一个或多个烟火效果的烟火系统;和/或抛射物系统(例如,用于释放或喷射诸如彩色纸屑、飘带、水滴或流、优惠券、纪念品和其他物体的抛射物)。
29.机载表演系统或组件150包括诸如(多个)处理器152和控制器156的计算资源,它们诸如通过接口158相互通信。具有处理器152(并且在一些情况下具有存储器160)的机载
表演控制器156可以完全位于uav底盘/主体122中或之上,并且机载表演控制器156可以经由接口158(例如,通过表演接口)从主机uav底盘122接收来自电源128的电力和来自飞行控制器134(或直接来自推进机构124和/或传感器126)的数据。机载表演控制器156可以连接到各种机载表演效果设备190,以便直接控制和排序它们的操作。
30.在平台110的一些实施例中,机载表演控制器156从基于地面的表演控制系统170接收定时和触发信号171。为此,表演控制系统170包括用于与机载表演组件150的eo设备154通信的eo设备174。eo设备174可以由处理器172管理,处理器172还执行代码和/或运行软件,以提供主/中央表演控制模块或表演控制器176的功能。表演控制系统170还包括存储器/数据存储180,其为表演系统机群中的每个uav 120存储记录或文件182,该记录或文件182存储特定于该uav 120及其表演效果设备168、190的数据(例如该uav 120在空间中的当前速度183和位置/定位184以及其他操作数据(例如,该uav 120的表演效果设备168、190的定向、操作状态等))。存储器180还可以存储表演计划186,该表演计划186定义了每个uav 120及其表演组件150的飞行路径和表演脚本,并且包括有界地理区域188的定义(例如,用于一个或多个uav 120的空间104内的表演空间和/或地面102上方的通过和不通过空间的边界的定义)。存储器180还可以存储实际表演表现如何不同于预定计划的日志,以便通知和改进控制系统和内容创作的发展。
31.在系统100的操作期间,机载表演控制器156可以从基于地面的表演控制系统170接收定时和触发信号171(并且如图所示存储在机载存储器162中)。该系统170独立于uav 120的安全关键飞行控制器134进行操作,但与uav底盘122的实时位置144(和信号163)相协调。地理位置144(和位置信号163)可用于通过基于预编程条件(例如,进入和/或离开特定地理区域188)的具有控制信号164的表演效果设备190的操作来致动表演效果,以便实时地与uav的飞行路径同步。由基于地面的表演控制系统170或机载表演控制器156确定uav 120正在离开有界地理区域188(例如,由于诸如导航不精确之类的因素)可使机载表演控制器156生成表演控制信号164以抑制或修改一个或多个表演效果设备190的操作,从而保持整体表演外观(例如,当uav 120离开空间104中的表演空间时,关闭或调暗照明系统或停止烟火或投影系统的操作
32.图2是本说明书的空中表演系统200的一个示例性实现方式的下侧透视图,示出了使用气流下洗216、219来使拖曳的表演效果设备230动画化。系统200是图1的典型系统100的部分,其中为了便于解释,未示出系统100的其他部件。如图所示,系统200包括uav 210,该uav 210具有底盘/主体212和旋翼214、217(加上两个未提及的附加旋翼,它们一起是uav的(多个)提升和推进机构的部分),旋翼214、217旋转/转动215、218以在地面204上方的空域208中提供提升和推进213。
33.系统200还包括具有主体232的表演效果设备230,主体232可以采用多种形式,其中图2提供了魔法飞行船的示例。表演效果设备230包括朝向主体232的尾部的第一可移动或可致动部件234,诸如可绕其中心轴转动的轮子或尾部螺旋桨,并且还包括朝向主体232的前部的第二可移动或可致动部件238,诸如可绕其中心轴转动的前部螺旋桨或风扇。表演效果设备230的主体通过一组线材/缆绳或其他系留的构件211耦接到uav底盘/主体212,使得当uav 210在地面208上方一定距离的空间208中飞行时,表演效果设备230悬挂在uav 210下方。因此,该移动(空间208中的提升和三维移动)向表演效果设备的主体232分别给予
势能和动能。
34.此外,表演效果设备230适于利用旋翼214、217的旋转215、218来实现(多个)表演效果。特别地,与构件211的耦接被设计成将第一可致动部件234定位在来自旋翼214的气流下洗216的路径中,使得在系统200的操作期间,旋转215创建流过可转动轮子234的表面的气流下洗216,致使其转动235。换言之,流动空气216中的气流下洗力用于进行工作以使表演效果设备230动画化。同样地,第二可致动部件238被定位在由旋翼217在其转动218以移动213uav 210时创建的气流下洗219的路径中,并且气流下洗219接触部件238(例如,其风扇或螺旋桨叶片)的表面,致使其转动239(或被致动或动画化)。虽然示出了两个部件234、238,但是表演效果设备230可以仅包括一个这样的部件或者三个、四个或更多。其他部件可采用类似的形式或不同的形式和配置,以提供一个或多个表面,在该表面上可施加气流下洗力,并提供一个或多个响应于(多个)力的这种施加而移动的特征或元件。
35.图3图示了使用uav 310、311以使用动能和势能以及气流下洗力的组合来动画化或激活表演效果设备330的另一空中表演系统(例如,图1的系统的部分的实现方式)300。在系统300中,一对uav 310、311通过缆绳/线316、317系留在表演效果设备330上,并且uav 310、311的旋翼312、313快速旋转,以提供提升和推进(或3d移动)320、321从而通过观众304所在的地面302上方的空域306。因此,uav 310、311的向上移动320、321为表演效果设备330的主体提供提升,以将其定位用于在空域306中展示,并且提升到地面302上方还向设备330给予势能,该势能随后可用于在由uav 310、311释放或下落(例如,将一根或多根缆绳/线316、317解耦或者以快速的方式将uav 310、311向下朝向地面302移动)后,利用枢轴或可移动部件334和335来激活或动画化其特征中的一个或多个,如箭头336和337所示(例如,从枢轴联轴器等从设备的主体向外延伸的臂)。由移动320、321提供的动能还可以用于激活部件334、335以期望的方式(以期望的速度或(多个)方向)移动336、337,例如,一个uav 310可以悬停,而另一个uav 311相对于uav 310移动,使臂334绕其枢轴联轴器枢转336。
36.除了使用由uav 310、311提供的势能和动能之外,还可以通过使用来自uav 310、311中的一个或两个的气流下洗力来激活或动画化表演效果设备330。例如,如图所示,表演效果设备330包括在表演效果设备330的主体的暴露表面上的多个可移动或可致动部件或构件340(例如,可以模仿草、头发或其他可移动物体的纹理元件)。来自uav 310的转动旋翼312的气流下洗314接触可致动部件340,这致使它们以动态或湍流的方式移动341。由气流下洗314提供的空气流的体积和它施加的力可以根据飞行器随着时间快速地在量和方向上变化,这对于在表演效果中创建可信的、有机的运动可能是期望的。以这种方式,表演效果设备330被独特地配置成利用由uav 310、311提供的势能、动能和气流下洗能量来实现可期望的表演效果。
37.从图1至3可以理解,空中表演系统提供了气流下洗推进或激活的部件或系统。动画平台(例如,表演效果设备或表演元件)可机械地耦接到uav的提升和推进系统(诸如经由uav主体/底盘和从其延伸的安装框架/结构)。此外,动画平台或其可移动部件与由uav的提升和推进系统产生或输出的气流下洗进行空气动力学地耦接。动画平台或其可移动部件可包括空气动力学表面,该空气动力学表面适于将气流下洗能量转换成动画动力以致动该动画平台的可移动部件。动画平台可以直接物理附接到提升和推进系统或uav主体/底盘,或者该动画平台也可以悬挂在uav上或由uav拖曳。uav的提升和推进系统在空域中产生湍流,
并且动画平台的空气动力学表面将移动的空气中的湍流或能量转化成动画动力。
38.在其他一些情况下,动画平台位于或定位在地面上,并且表演系统的一个或多个uav在该平台上方横越以生成气流下洗,来动画化或激活该平台的可移动或可致动部件。图4图示了空中表演系统(例如,图1的系统的部分的另一实现方式)400,其使用uav来使用其气流下洗来动画化或激活基于地面的表演效果设备。具体而言,系统400包括表演效果设备410,该表演效果设备410具有定位或支撑在地面402上的基座或平台,并且设备410包括可移动或可致动部件416,该可移动或可致动部件416枢转地耦接或支撑在固定到基座412的塔414的顶部处。可移动部件416在施加外力之前通常是静止的,因为设备410不包括用于使部件416(例如,螺旋桨或风车等的叶片)转动的致动器或马达。
39.系统400包括uav 420a、420b,以选择性地提供气流下洗力,来使部件416绕其中心轴转动。在第一操作状态中,uav 420a使用其提升和推进机构(例如,如箭头423a所示的转动的旋翼等)422在地面402上方的空域404中的三个维度上移动421a该uav 420a。uav 420a不位于空域404中将其气流下洗引导到部件416的表面上的定位,因此它不转动(即,当前未被致动)。为了适合表演效果的特定表演线和时间,uav 420b沿着飞行路径429移动421b,以悬停在空域404中的第二定位,该第二定位被选择为将来自uav 420b的其操作423b提升和推进机构422的气流下洗425引导到可移动部件416的空气动力学表面上,这将气流下洗能量转换成移动417(这里是旋转),使得部件416被气流下洗425激活或致动。uav 420b的离地高度可以改变以调节气流下洗的力,从而调节表演效果的大小。当不再期望表演效果时,uav 420a可沿路径429飞行421a回到其在空域404中的第一操作定位(或将气流下洗从部件416或其空气动力学表面移动离开的另一位置)。以这种方式,uav可以有效地用于以选择性的方式提供基于地面的表演效果设备的致动,以允许表演效果设备的操作与空域404中或地面402上的其他表演效果设备很好地同步。
40.图5图示了空中表演系统(例如,图1的系统的部分的实现方式)500,其示出了uav的使用以及它们输出或提供的能量,以实现附加的表演效果,该附加的表演效果可以与图2至4的那些表演效果一起使用或独立使用以实现独特的表演体验。如图所示,系统500包括uav 510,其在三个维度上飞行511通过地面502上方的某个距离的空域504。为此,uav 510包括具有多个旋翼512的提升和推进机构,旋翼512如箭头513所示旋转。因此,每个旋翼512生成气流下洗514,气流下洗514是朝向地面502移动的气流。
41.表演效果设备520被耦接到uav 510的主体/底盘,以与uav 510一起在空域504周围移动511。表演效果设备520包括呈多个粒子或物体526形式的可移动或可致动部件,多个粒子或物体526可以例如通过如箭头525所示打开释放门或舱口524而从设备520的主体选择性地发动或释放。由移动511提供的uav 510的动能和势能被给予这些释放的粒子526。此外,气流下洗514还将湍流和能量给予粒子,以实现期望的表演效果。这种效果可以通过在提升和推进机构512的旋翼或出口下方提供一个或多个漏斗或类似的流动引导/成形设备516来调节或改变,以在气流被引入粒子526及其空气动力学表面之前如箭头517所示地接收和重新引导/聚集气流。这些粒子可以采用人造雪、彩色纸屑、气泡、纱线、丝带、具有空气动力学表面的物体、水滴、促销品等形式,以达到期望的表演效果或观众反应。
42.在一些情况下(如图所示),基于地面的表演效果设备530也包括在系统500中,并且设备530包括用于将图像或光533投射到下落的粒子526上的投影仪或其他光源532。为
此,漏斗部件516和/或机载表演效果设备520的主体的出口部分可被配置成引导粒子526和/或使它们的流动模式成形,以便创建投影表面或屏幕。投影仪/光源532然后可以将其光533投射到这个基于粒子的屏幕上。在一些实施例中,颗粒526采取水滴的形式,并且设备520的气流下洗517和/或出口元件适于蒸发出口水以形成水滴526。
43.系统500还包括在地面502上方一定距离的空域504中飞行541的第二uav 540。uav 540被显示为支撑表演效果设备550a,该表演效果设备550a可以采用电子动画或机器人设备的形式。uav 540的移动/飞行541将动能和势能给予电子动画/设备550a,并且这可用于完成空中动作或表演效果。这显示了电子动画/设备550b在从uav的主体/底盘释放或发动(例如,解开系绳,给予附加的力以在特定方向以期望的速度引导电子动画/设备550b,等等)时操作在第二状态。在第二操作状态中,电子动画/设备550b可配备有可致动的空气动力学表面,以在它通过空气空间504朝向地面行进时调节其轨迹特性并实现期望的一系列移动555。在释放/发动前由uav 540给予的势能和动能,以及当设备550b离开uav 540下方的影响区域时任何空气动力学表面上的气流下洗的力,都促进了这些动作。
44.系统500还包括飞行561穿过空域504的第三uav 560,并且提供了具有可移动或可致动部件572a、572b的基于地面的表演效果设备570。部件572a、572b可以是机器人部件、表演道具等,其通过线/缆绳574a、574b耦接或系留。在系统500的第一操作状态中,部件/物体572a被附接到或支撑在表演效果设备570的基座/平台571上,并且uav 560移动561,这将能量给予系留的线/缆绳574a。在系统500的第二操作状态中,部件/物体572b从基座/平台571释放或提升离开,因为系留的线/缆绳574b中的该能量被释放或发动或移动578部件/物体572b,诸如通过抛射物运动和/或摇摆运动。
45.尽管已经以一定程度的特殊性描述和说明了本发明,但是应当理解,本公开仅通过示例的方式进行,并且在不脱离本发明的精神和范围的情况下,本领域技术人员可以对部件的组合和布置进行多种改变,如上文所要求保护的。