1.本实用新型涉及水环境控制技术领域,尤其是一种便于充电的水务监测无人机,能满足大型水域持续和自动地水务监测需求。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,或者由车载计算机完全地或间歇地自主地操作。
3.与有人驾驶的飞机相比,无人机往往更适合那些重复和危险的任务。无人机按应用领域;在军用方面,无人机分为侦察机、攻击机和靶机;在民用方面,无人机嵌入各行业应用,对无人机有着广泛的需求,目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、野生观察、传染病监控、测绘、新闻报道、电力巡检、水务监测、救灾、影视拍摄、空中表演等领域的应用,极大拓展了无人机本身的用途。
4.但是无人机在运行过程中,对电能的损耗较快,极大降低无人机的持续水务监测的能力,尤其是无人机在工作完成后,需要人工收纳整理,降低了自动化程度;一则因为无人机对电池的挂载能力有限,二则由于无人机持续的高空飞行十分费电,通常运行半小时后就需要返航充电或更换电池,无论是更换电池还是为电池充电,大多需要人工参与,破坏了无人机整体智能性;具体的,无人机充电前,需要人工将电池从电池舱中取出来,然后放置到充电箱中充电,充完电后再人工将电池返回电池舱中为无人机供电,整个过程复杂,自动化程度低。
5.鉴于此,克服上述现有技术所存在的缺陷是本技术领域亟待解决的问题。
技术实现要素:
6.本实用新型需要解决的技术问题是:现有无人机很难独立完成有线充电,需要人工将电池从电池舱中取出来,然后放置到充电箱中充电,充完电后再人工将电池返回电池舱中,无人机供电的整个过程复杂,自动化程度低。
7.本实用新型通过如下技术方案达到上述目的:提供一种便于充电的水务监测无人机,包括机架、飞控系统、通讯系统、电源系统和监测设备;
8.所述机架作为无人机的支撑骨架,用于挂载飞控系统、通讯系统、电源系统和监测设备;
9.所述飞控系统作为无人机的控制枢纽,连接并监控通讯系统、电源系统和监测设备的运行工况;所述飞控系统通过通讯设备与外界通信;所述电源系统给飞控系统、通讯系统和监测设备供电;
10.所述飞控系统和通信设备安装于机架中端;
11.所述电源系统分布设置于机架上;
12.所述监测设备挂载于机架下端,无人机在巡航过程中可借助监测设备获取水务信息。
13.进一步的,所述机架包括支撑环、力臂、脚架和防雨罩,所述力臂水平均匀地分布于支撑环四周,所述脚架均匀分布于支撑环下端,所述防雨罩固定在支撑环的上方;支撑环和防雨罩之间设置有控制舱,支撑环的下方设置有电池舱;所述力臂的尾端设置有螺旋桨系统;螺旋桨系统包括电机、电调和桨叶;具体的,所述飞控系统和通信设备安装于控制舱中;所述支撑环、力臂、脚架和防雨罩采用碳纤维材质制成。
14.进一步的,所述电源系统包括配套设置地充电接口、充电器和动力电池;所述充电接口与充电器相连,可将外部电源输送给充电器,所述充电器与动力电池相连,可对动力电池直接充电,动力电池可持续地为无人机中用电设备供电;
15.所述充电器和动力电池配套地安装于电池舱中,尤其是动力电池安装时,需要根据整个无人机的重心要求调整;
16.所述充电接口分为上充电口和下充电口,其中上充电口架设于机架的最顶端,下充电口设置于机架的最底端;
17.所述监测设备挂载在电池舱上,可无遮挡地巡航监测。
18.进一步的,所述上充电口为竖直向上的金属杆,垂直设置于防雨罩的顶部;所述下充电口为环形金属圈,设置于脚架的底部。
19.进一步的,所述金属杆顶端设置有弹簧探头,当金属杆的顶部被挤压时,弹簧探头可改变长度和/或弯折角度,保持向上顶起的趋势。
20.进一步的,所述电源系统还包括与无人机高度配套地充电夹板,安装于可停放无人机的机库或空场地;
21.所述充电夹板包括上部夹板、支撑夹板、下部夹板和旋转电机;所述支撑夹板垂直地固定在下部夹板一端,所述上部夹板可旋转的设置于支撑夹板上端,所述旋转电机固定在支撑夹板上,旋转电机的输出轴套接在上部夹板上,可驱动上部夹板围绕支撑夹板的上端旋转;
22.所述旋转电机的处理器中设置有可与飞控系统通讯的蓝牙模块,可接收飞控系统的动作指令;
23.所述上部夹板与无人机的金属杆的电极一致,并在接触时保持连通;所述下部夹板与无人机的金属圈的电极一致,并在接触时保持连通;当所述旋转电机驱动上部夹板旋转至与下部夹板平行并将无人机夹在中间时,上部夹板压住金属杆,下部夹板顶住金属圈,可将外部电源引入无人机,为无人机充电。
24.进一步的,所述飞控系统包括主控器、姿态感应器、gps天线、北斗天线、电子罗盘、电源控制模块和/或led提示灯。
25.进一步的,所述通讯系统包括通信电台、5g通信设备、微波通信台和/或蓝牙模块。
26.进一步的,所述监测设备包括相机云台和摄像头,其中相机云台挂载于电池舱的底部,摄像头配套地安装于相机云台上,相机云台能调整摄像头的工作角度并保持摄像头的平稳摄像,摄像头能及时获取视频和图片信息。
27.进一步的,所述监测设备还包括仪器云台、流速仪和/或水深仪,其中仪器云台挂载于电池舱的一侧,流速仪和/或水深仪配套地挂载于仪器云台上,仪器云台可调整流速仪和/或水深仪的工作角度并保持流速仪和/或水深仪的平稳监测,其中流速仪能及时获取河流、水库或湖泊中水体的流速,水深仪能及时获取河流、水库或湖泊中水体的水深信息。
28.无人机在水务监测及充电过程中涉及的步骤如下。
29.步骤1:初始状态时,无人机停放在机库的充电夹板内充电,当无人机电量高于指定阈值时即可执行巡航任务。
30.步骤2:准备起飞:飞控系统给旋转电机下发“准备巡航”指令;旋转电机带动上部夹板顺时针旋转至上部夹板完全打开,并将上部夹板当前状态汇报给飞控系统。
31.步骤3:起飞巡航:无人机根据上部夹板的当前角度,确定可安全起飞时,启动螺旋桨系统,按照指定巡航路线,前往水域上空正常巡航拍照和/或监测水体流速。
32.步骤4:自动返航:当动力电池的电量低于指定阈值时,飞控系统启动自动返航的程序,朝充电夹板飞去,并停留在下部夹板上。
33.步骤5:准备充电:当无人机停稳后,飞控系统给旋转电机下发“准备充电”指令,旋转电机带动上部夹板逆时针旋转,上部夹板朝金属杆方向靠近。
34.步骤6:正常充电:当上部夹板与下部夹板平行,并且上部夹板压住金属杆,下部夹板顶住金属圈时,充电夹板将外部电源引入无人机,给无人机充电。
35.本实用新型相比现有技术具有以下优点。
36.1、将充电接口的两极分别设置于无人机的最顶端和最底端,便于无人机直接通过充电夹板充电,尤其是所述金属杆顶端设置有弹簧探头,当金属杆的顶部被挤压时,弹簧探头可改变长度和/或弯折角度,保持向上顶起的趋势,从而确保充电接触点的牢固连接。
37.2、采用轻质的支撑环,腾出空间即能挂载更多设备,又能减轻机架的重量。
38.3、通过设置仪器云台抵消无人机在飞行过程中对流速仪和/或水深仪的影响,使无人机在飞行和悬停状态下均能得到较好的监测值。
附图说明
39.为了更清楚地说明本实用新型实施例的技术方案,下面将对本实用新型实施例中所需要使用的附图作简单地介绍。显而易见地,下面所描述的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
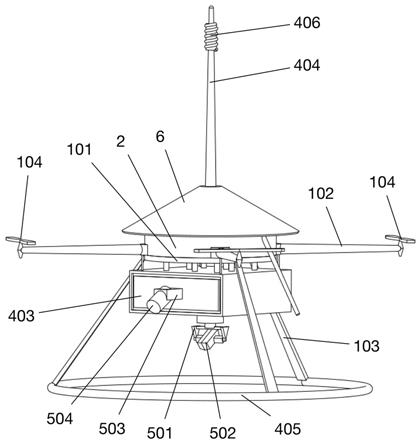
40.图1为实施例中无人机的立体图。
41.图2为实施例中无人机的设备组成结构图。
42.图3为实施例中机架的立体图。
43.图4为实施例中无人机停在充电夹板上的工作状态立体图。
44.图5为实施例中上部夹板压向无人机的上充电口的工作状态立体图。
45.图6为实施例中无人机正在充电夹板中充电时左视图。
46.图中:1
‑
机架;2
‑
飞控系统;3
‑
通讯系统;4
‑
电源系统;5
‑
监测设备;6
‑
防雨罩;101
‑
支撑环;102
‑
力臂;103
‑
脚架;104
‑
螺旋桨系统;401
‑
充电接口;402
‑
充电器;403
‑
动力电池;404
‑
上充电口;405
‑
下充电口;406
‑
弹簧探头;407
‑
上部夹板;408
‑
支撑夹板;409
‑
下部夹板;410
‑
旋转电机;501
‑
相机云台;502
‑
摄像头;503
‑
仪器云台;504
‑
流速仪;505
‑
水深仪。
具体实施方式
47.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施
例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
48.在本实用新型的描述中,术语“内”、“外”、“纵向”、“横向”、“上”、“下”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不应当理解为对本实用新型的限制。
49.此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。下面就参考附图和实施例结合来详细说明本实用新型。
50.实施例,如图1
‑
6所示,提供一种便于充电的水务监测无人机,包括机架1、飞控系统2、通讯系统3、电源系统4和监测设备5;
51.所述机架1作为无人机的支撑骨架,用于挂载飞控系统2、通讯系统3、电源系统4和监测设备5;
52.所述飞控系统2作为无人机的控制枢纽,连接并监控通讯系统3、电源系统4和监测设备5的运行工况;所述飞控系统2通过通讯设备与外界通信;所述电源系统4给飞控系统2、通讯系统3和监测设备5供电;
53.所述飞控系统2和通信设备安装于机架1中端;
54.所述电源系统4分布设置于机架1上;
55.所述监测设备5挂载于机架1下端,无人机在巡航过程中可借助监测设备5获取水务信息。
56.本实施例中,所述机架1包括支撑环101、力臂102、脚架103和防雨罩6,所述力臂102共四个,水平均匀分布设置于支撑环101四周,所述脚架103共三个,均匀分布设置于支撑环101下端,所述防雨罩6通过螺栓固定在支撑环101的上方;支撑环101和防雨罩6之间设置有控制舱,支撑环101的下方设置有电池舱;所述力臂102的尾端设置有螺旋桨系统104;螺旋桨系统104包括电机、电调和桨叶;具体的,所述飞控系统2和通信设备安装于控制舱中;所述支撑环101、力臂102、脚架103和防雨罩6采用碳纤维材质制成,其中支撑环101的直径为25cm,防雨罩6的直径为34cm,防雨罩6可为控制舱和电池舱遮挡上方的雨水。
57.本实施例中,所述电源系统4包括配套设置地充电接口401、充电器402和动力电池403;所述充电接口401与充电器402相连,可将外部电源输送给充电器402,所述充电器402与动力电池403相连,可对动力电池403直接充电,动力电池403可持续地为无人机中用电设备供电;
58.所述充电器402和动力电池403配套地安装于电池舱中,尤其是动力电池403安装时,需要根据整个无人机的重心要求调整,其中动力电池403为锂聚合物电池;
59.所述充电接口401分为上充电口404和下充电口405,其中上充电口404架设于机架1的最顶端,下充电口405设置于机架1的最底端;
60.所述监测设备5挂载在电池舱上,可无遮挡地巡航监测。
61.本实施例中,所述上充电口404为竖直向上的金属杆,高度为30cm,垂直设置于防雨罩6的顶部;所述下充电口405为环形金属圈,金属圈为圆形,直径为60cm,设置于脚架103的底部。
62.本实施例中,所述金属杆顶端设置有弹簧探头406,当金属杆的顶部被挤压时,弹
簧探头406可改变长度和/或弯折角度,保持向上顶起的趋势。
63.本实施例中,所述电源系统4还包括与无人机高度配套地充电夹板,安装于可停放无人机的机库或空场地;
64.所述充电夹板包括上部夹板407、支撑夹板408、下部夹板409和旋转电机410;所述支撑夹板408垂直地固定在下部夹板409右端,所述上部夹板407可旋转的设置于支撑夹板408上端,所述旋转电机410固定在支撑夹板408上,旋转电机410的输出轴套接在上部夹板407上,可驱动上部夹板407围绕支撑夹板408的上端旋转;
65.所述旋转电机410的处理器中设置有可与飞控系统2通讯的蓝牙模块,可接收飞控系统2的动作指令;
66.所述上部夹板407与无人机的金属杆的电极一致,并在接触时保持连通;所述下部夹板409与无人机的金属圈的电极一致,并在接触时保持连通;当所述旋转电机410驱动上部夹板407旋转至与下部夹板409平行并将无人机夹在中间时,上部夹板407压住金属杆,下部夹板409顶住金属圈,可将外部电源引入无人机,为无人机充电;
67.具体的,上部夹板407与金属杆的接触面都设置有通电铜片,下部夹板409与金属圈的接触面都设置通电铜片,当上部夹板407接通220v交流市电的火线,则下部夹板409接通220v交流市电的零线时,可将220v交流市电传送给金属杆和金属圈,进而通过充电器402给动力电池403充电。
68.本实施例中,所述飞控系统2包括主控器、姿态感应器、北斗天线、电子罗盘、电源控制模块和led提示灯。
69.本实施例中,所述通讯系统3包括5g通信设备和蓝牙模块。
70.本实施例中,所述监测设备5包括相机云台501和摄像头502,具体型号为大疆精灵4a,其中相机云台501挂载于电池舱的底部,摄像头502配套地安装于相机云台501上,相机云台501能调整摄像头502的工作角度并保持摄像头502的平稳摄像,摄像头502能及时获取视频和图片信息。
71.本实施例中,所述监测设备5还包括润恒奥仪器rha
‑
pts
‑
303仪器云台503和senlod sld
‑
dbmq非接触式流速仪504;其中仪器云台503挂载于电池舱的前侧,流速仪504或水深仪505配套地挂载于仪器云台503上,仪器云台503可调整流速仪504的工作角度并保持流速仪504平稳监测,其中流速仪504能及时获取河流、水库或湖泊中水体的流速;当挂载水深仪505时,可利用水深仪505获取河流、水库或湖泊中水体的水深信息。
72.无人机在水务监测及充电过程中涉及的步骤如下。
73.步骤1:初始状态时,无人机停放在机库的充电夹板内充电,当无人机电量高于指定阈值90%时即可执行巡航任务。
74.步骤2:准备起飞:飞控系统2给旋转电机410下发“准备巡航”指令;旋转电机410带动上部夹板407顺时针旋转,并将上部夹板407当前状态汇报给飞控系统2,如图4所示为上部夹板407已完全打开。
75.步骤3:起飞巡航:无人机根据上部夹板407的当前角度,确定可安全起飞时,启动螺旋桨系统104,按照指定巡航路线,前往水域上空正常巡航拍照或监测水体流速。
76.步骤4:自动返航:当动力电池403的电量低于指定阈值20%时,飞控系统2启动自动返航的程序,朝充电夹板飞去,并停留在下部夹板409上,如图4所示,无人机已在下部夹板
409上停稳。
77.步骤5:准备充电:当无人机停稳后,飞控系统2给旋转电机410下发“准备充电”指令,旋转电机410带动上部夹板407逆时针旋转;如图5所示为上部夹板407正在朝金属杆方向靠近。
78.步骤6:正常充电,当上部夹板407与下部夹板409平行,并且上部夹板407压住金属杆,下部夹板409顶住金属圈时,如图6所示,充电夹板正在给无人机充电。
79.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。