1.本实用新型涉及无人机技术领域,特别涉及一种水面垃圾清理无人机。
背景技术:
2.近年来无人机领域迅速发展,各种功能用途的无人机多点开花,全面发展,全面进入各个行业进行功能的替代和改进。而随着工业化的推进,对自然资源的全面开发,环境问题愈发严重,特别是河流污染问题,现有的河流清理方案大多是人工驾船水面进行清理,更进一步的设备则是专用的清理船只,但这些都离不开人工配合清理,这就导致清理难度大,效率无法进一步提升,同时工作的环境存在一定的危险。
技术实现要素:
3.本实用新型为了解决上述技术的不足,提供了一种水面垃圾清理无人机,包括无人机本体、若干螺旋桨叶以及无人机遥控系统,所述若干螺旋桨叶安装于无人机本体上,所述无人机本体下部设有一收集槽管,所述收集槽管壁上开有若干通孔,所述槽管两侧边上对称设有一对延伸臂,所述收集槽管顶部固定设有一对电机,所述一对延伸臂的一端设有转轴,所述一对延伸臂通过转轴与一对电机轴向固定连接并绕转轴做周向转动,所述一对电机均通过plc受无人机遥控系统控制,所述一对延伸臂上均开有若干导流槽,所述收集槽管远离一对延伸臂一端的通口上设有收集网。
4.采用上述技术方案,通过在无人机上设置收集槽管与收集网,可以实现对水面上的垃圾以及污染物进行收集,通过在在收集槽管上设置通孔,可以有效减少无人机在垃圾收集时收到的阻力,减轻对无人机动力的负担,通过在收集槽管两侧设置由电机驱动的延伸臂,使得可以扩大垃圾收集范围,有效提高了无人机的工作效率,同时延伸臂可以通过遥控系统控制其张开的角度以及两臂宽度,由此可以实现适应不同的河道宽度,增大了本无人机的适用范围,通过在一对延伸臂上开设导流槽,可以增加延伸臂的局部流速以防止部分垃圾附着在延伸臂上。
5.本实用新型的进一步设置:所述收集网网口固定设有一对漂浮球,所述一对漂浮球之间设有一根连杆并通过该连杆固定连接,所述收集网网口上连杆的两侧设有一对磁石,所述收集网通过一对磁石吸附固定在收集槽管上并与收集槽管作可拆卸配合。
6.采用上述技术方案,由于所述收集网网口固定设有一对漂浮球,所述一对漂浮球之间设有一根连杆并通过该连杆固定连接,使得收集网不至于被已收集的垃圾的重量影响从而沉入水中,给收集工作带来困难,所述收集网网口上连杆的两侧设有一对磁石,所述收集网通过一对磁石在收集槽管上并与收集槽管作可拆卸配合,使得收集网在保证了与收集槽管的连接强度的同时,可以快速拆卸,使得在处理已收集的垃圾使不用停止无人机以及花费大量时间,只需将收集网取下另换一个收集网安装上去即可,大大节省了时间,进一步提升了工作效率。
7.本实用新型的进一步设置:所述无人机本体上套设有一漂浮罩,所述漂浮罩上开
有若干通风孔。
8.采用上述技术方案,由于所述无人机本体上套设有一漂浮罩,所述漂浮罩上开有若干通风孔,使得在发生意外时无人机不至于沉没入水中,同时也尽可能减小了无人机飞行时的阻力。
9.本实用新型的进一步设置:所述收集槽管的两侧面上均设有漂浮球。
10.采用上述技术方案,由于所述收集槽管的两侧面上均设有漂浮球,使得可以减轻部分已收集垃圾的重力,增加了无人机的安全性。
11.本实用新型的进一步设置:所述无人机本体上设有一检测摄像头。
12.采用上述技术方案,由于所述无人机本体上设有一检测摄像头,使得可以实时观察水面情况,不仅可以迅速找到清理目标,也可以在完成一个区域的清理工作后迅速转移阵地。
附图说明
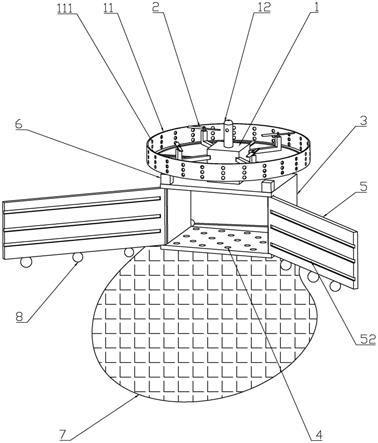
13.附图1为本实用新型具体实施例的一种水面垃圾清理无人机的结构示意图。
14.附图2为本实用新型具体实施例的一种水面垃圾清理无人机中延伸臂的结构示意图。
15.附图3为本实用新型具体实施例的一种水面垃圾清理无人机中收集网的结构示意图。
[0016]1‑
无人机本体,2
‑
螺旋桨叶,3
‑
收集槽管,4
‑
通孔,5
‑
延伸臂,51
‑
转轴,52
‑
导流槽, 6
‑
电机,7
‑
收集网,8
‑
漂浮球,9
‑
连杆,10
‑
磁石,11
‑
漂浮罩,111
‑
通风孔,12
‑
检测摄像头。
具体实施方式
[0017]
如图1
‑
3所示,一种水面垃圾清理无人机,包括无人机本体1、若干螺旋桨叶2以及无人机遥控系统,所述若干螺旋桨叶安装于无人机本体上,所述无人机本体下部设有一收集槽管3,所述收集槽管壁上开有若干通孔4,所述槽管两侧边上对称设有一对延伸臂5,所述收集槽管顶部固定设有一对电机6,所述一对延伸臂的一端设有转轴51,所述一对延伸臂通过转轴与一对电机轴向固定连接并绕转轴做周向转动,所述一对电机均通过plc受无人机遥控系统控制,所述一对延伸臂上均开有若干导流槽52,所述收集槽管远离一对延伸臂一端的通口上设有收集网7。
[0018]
通过在无人机上设置收集槽管与收集网,可以实现对水面上的垃圾以及污染物进行收集,通过在在收集槽管上设置通孔,可以有效减少无人机在垃圾收集时收到的阻力,减轻对无人机动力的负担,通过在收集槽管两侧设置由电机驱动的延伸臂,使得可以扩大垃圾收集范围,有效提高了无人机的工作效率,同时延伸臂可以通过遥控系统控制其张开的角度以及两臂宽度,由此可以实现适应不同的河道宽度,增大了本无人机的适用范围,通过在一对延伸臂上开设导流槽,可以增加延伸臂的局部流速以防止部分垃圾附着在延伸臂上。
[0019]
所述收集网网口固定设有一对漂浮球8,所述一对漂浮球之间设有一根连杆9并通过该连杆固定连接,所述收集网网口上连杆的两侧设有一对磁石10,所述收集网通过一对磁石吸附固定在收集槽管上并与收集槽管作可拆卸配合。
[0020]
由于所述收集网网口固定设有一对漂浮球,所述一对漂浮球之间设有一根连杆并通过该连杆固定连接,使得收集网不至于被已收集的垃圾的重量影响从而沉入水中,给收集工作带来困难,所述收集网网口上连杆的两侧设有一对磁石,所述收集网通过一对磁石在收集槽管上并与收集槽管作可拆卸配合,使得收集网在保证了与收集槽管的连接强度的同时,可以快速拆卸,使得在处理已收集的垃圾使不用停止无人机以及花费大量时间,只需将收集网取下另换一个收集网安装上去即可,大大节省了时间,进一步提升了工作效率。
[0021]
所述无人机本体上套设有一漂浮罩11,所述漂浮罩上开有若干通风孔111。
[0022]
由于所述无人机本体上套设有一漂浮罩,所述漂浮罩上开有若干通风孔,使得在发生意外时无人机不至于沉没入水中,同时也尽可能减小了无人机飞行时的阻力。
[0023]
所述收集槽管的两侧面上均设有漂浮球。
[0024]
由于所述收集槽管的两侧面上均设有漂浮球,使得可以减轻部分已收集垃圾的重力,增加了无人机的安全性。
[0025]
所述无人机本体上设有一检测摄像头12。
[0026]
由于所述无人机本体上设有一检测摄像头,使得可以实时观察水面情况,不仅可以迅速找到清理目标,也可以在完成一个区域的清理工作后迅速转移阵地。