1.本实用新型涉及无人机技术领域,尤其涉及一种可用于热成像的无人机。
背景技术:
2.随着无人机技术的发展,越来越多的领域已经广泛采用无人机作为检测、勘察工具。现有技术中,通常通常在无人机上设置监测、勘察设备来对目标区域、建筑物等进行检测、勘察。比如,无人机搭载红外热成像系统以及可见光成像系统;在移动终端中规划无人机的图像巡检区域,设置无人机的飞行参数和温度预警参数;红外热成像系统将采集到的红外影像信息、可见光成像系统将拍摄的图像信息回传至移动终端,即可对巡检区域进行勘察、监测,但是无人机在飞行过程中,通常是对目标区域、建筑物等进行动态捕捉,实现检测、勘察的目的,这样需要动态调整无人机的姿态以调整监测设备的拍摄姿态,但是现有技术中,由于无人机体积小,控制相对简单,不太适合对其飞行姿态进行复杂度较高的调整。
技术实现要素:
3.本实用新型所要解决的技术问题是针对上述现有技术的不足,提供一种可用于热成像的无人机。
4.本实用新型解决上述技术问题的技术方案如下:一种可用于热成像的无人机,包括无人机本体,所述无人机本体的上部四周分别设有螺旋桨,所述无人机本体的下部两侧分别固定连接有支腿,所述无人机本体的底部中间位置处设有可竖向伸缩调节并可水平周向转动的调节机构,所述调节机构上活动设有红外热成像组件,且所述调节机构在竖向伸缩调节时可驱动所述红外热成像组件调节空间姿态,所述调节机构在水平周向转动时可驱动所述红外热成像组件一同水平转动。
5.本实用新型的有益效果是:本实用新型的可用于热成像的无人机,通过在所述无人机本体的底部中间位置处设置调节机构,这样可以通过调节机构比较方便地调节红外热成像组件的空间姿态和水平周向角度方位,结构简单,调节方便,无需控制无人机进行飞行姿态较为复杂的调整即可实现红外热成像组件的任意姿态和任意方位角度调整,调节稳定性好,并且在非工作状态时通过调节机构将红外热成像组件收缩于支腿之间,起到保护作用。
6.在上述技术方案的基础上,本实用新型还可以做如下改进:
7.进一步:所述调节机构包括云台、四根可伸缩运动的调节杆和连接板,所述调节杆的上端与所述无人机本体的底部中间位置连接,所述调节杆的下端与所述连接板的四周边角处对应活动连接,所述云台设置在所述连接板的下表面,所述红外热成像组件设置在所述云台的下表面,且四根所述调节杆可驱动所述连接板运动,以带动所述云台调节所述红外热成像组件的姿态,所述云台可带动所述红外热成像组件一同水平转动。
8.上述进一步方案的有益效果是:通过所述调节杆的伸缩调节可以驱动所述连接板对应的边角处上下运动,从而起到调节所述红外热成像组件的姿态的作用,同时所述云台
可水平周向转动并带动所述红外热成像组件一同水平转动,从而调节所述红外热成像组件的方位角度,这样可以比较方便在三维空间中对所述红外热成像组件进行任意调节,从而实现巡检区域的全覆盖监测。
9.进一步:所述红外热成像组件包括内部中空下端开口设置的外壳、多根丝杠、红外热成像仪,所述外壳的内顶壁设有驱动电机,所述外壳内位于所述驱动电机的下方设有支撑板,所述外壳的下端口内设有载板,所述红外热成像仪设置在所述载板的下表面,多根所述丝杠设置在所述支撑板与所述载板之间,所述丝杠的下端与所述载板螺纹连接,所述丝杠的上端向上穿过所述支撑板并与所述驱动电机的驱动端传动连接,所述驱动电机可驱动所述丝杠转动,以驱动所述载板带动所述红外热成像仪从所述外壳的下端口伸出,或者从所述外壳的下端口外缩进至所述外壳内。
10.上述进一步方案的有益效果是:通过所述驱动电机驱动所述丝杠转动,所述丝杠转动进而驱动所述载板沿着所述丝杠上下运动,从而调节所述红外热成像仪从所述外壳的下端口伸出,或者从所述外壳的下端口外缩进至所述外壳内,方便在不工作时对所述红外热成像仪进行保护。
11.进一步:所述外壳的相对两侧内壁上竖向设有滑道,所述载板的两端分别与对应一侧的滑道滑动连接,且当所述驱动电机可驱动所述丝杠转动时,所述载板沿着所述滑道在所述外壳内升降运动。
12.上述进一步方案的有益效果是:通过在所述外壳的相对两侧内壁上竖向设置滑道,这样当所述丝杠转动进而驱动所述载板沿着所述丝杠上下运动时,所述载板可以更加稳定的上下运动,从而保证所述红外热成像仪的监测稳定性。
13.进一步:所述驱动电机的驱动端设有主动轮,所述丝杠的上端设动从动轮,所述主动轮与所述从动轮之间通过皮带传动连接,且所述主动轮可驱动所述从动轮带动多个所述丝杠同步转动。
14.上述进一步方案的有益效果是:通过所述驱动电机的驱动端驱动所述主动轮转动,主动轮通过所述皮带带动所述从动轮连同对应的所述丝杠转动,从而实现所述载板连同所述红外热成像仪升降运动。
15.进一步:所述红外热成像组件还包括透明的保护罩,所述保护罩设置在所述外壳的下端口处,当所述丝杠驱动所述红外热成像仪从所述外壳的下端口伸出时,所述保护罩将所述红外热成像仪罩住。
16.上述进一步方案的有益效果是:通过所述保护罩可以对所述红外热成像仪起到保护作用,避免外力作用造成物理破坏,同时也可以起到防水防尘的作用,有利于提高监测准确性。
17.进一步:还包括减震板,所述减震板设置在所述无人机本体的底部中间位置处,且所述无人机本体的底部中间位置与减震板之间设有多个减震器,所述调节机构设置在所述减震板的下表面。
18.上述进一步方案的有益效果是:通过所述减震板和所述减震器可以有效降低无人机在飞行过程中的物理振动对所述红外热成像仪造成的干扰,大大提高监测质量和监测精度。
附图说明
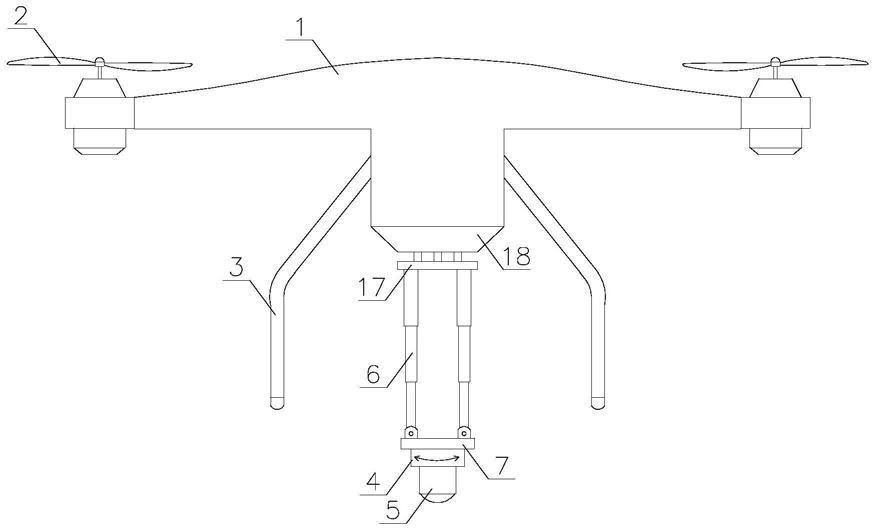
19.图1为本实用新型一实施例的可用于热成像的无人机的结构示意图一;
20.图2为本实用新型一实施例的可用于热成像的无人机的结构示意图二;
21.图3为本实用新型另一实施例的可用于热成像的无人机的结构示意图;
22.图4为本实用新型一实施例的红外热成像组件的结构示意图一;
23.图5为本实用新型一实施例的红外热成像组件的结构示意图二。
24.附图中,各标号所代表的部件列表如下:
25.1、无人机本体,2、螺旋桨,3、支腿,4、云台,5、红外热成像组件,6、调节杆,7、连接板,8、外壳,9、丝杠,10、驱动电机,11、支撑板,12、载板,13、主动轮,14、从动轮,15、皮带,16、保护罩,17、减震板,18、减震器。
具体实施方式
26.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
27.如图1至图3所示,一种可用于热成像的无人机,包括无人机本体1,所述无人机本体1的上部四周分别设有螺旋桨2,所述无人机本体1的下部两侧分别固定连接有支腿3,所述无人机本体1的底部中间位置处设有可竖向伸缩调节并可水平周向转动的调节机构,所述调节机构上活动设有红外热成像组件5,且所述调节机构在竖向伸缩调节时可驱动所述红外热成像组件5调节空间姿态,所述调节机构在水平周向转动时可驱动所述红外热成像组件5一同水平转动。
28.本实用新型的可用于热成像的无人机,通过在所述无人机本体1的底部中间位置处设置调节机构,这样可以通过调节机构比较方便地调节红外热成像组件5的空间姿态和水平周向角度方位,结构简单,调节方便,无需控制无人机进行飞行姿态较为复杂的调整即可实现红外热成像组件5的任意姿态和任意方位角度调整,调节稳定性好,并且在非工作状态时通过调节机构将红外热成像组件5收缩于支腿3之间,起到保护作用。
29.为了在无人机起降时具有较好的缓震效果,实际中,所述支腿3采用柔性较好的轻质金属材质,这样以方便可以减小整个无人机的重量,另一方面可以在无人机起降时能缓慢吸收部分外力,保证无人机受力不会过大。
30.如图1和图2所示,在本实用新型的一个或多个实施例中,所述调节机构包括云台4、四根可伸缩运动的调节杆6和连接板7,所述调节杆6的上端与所述无人机本体1的底部中间位置连接,所述调节杆6的下端与所述连接板7的四周边角处对应活动连接,所述云台4设置在所述连接板7的下表面,所述红外热成像组件5设置在所述云台4的下表面,且四根所述调节杆6可驱动所述连接板7运动,以带动所述云台4调节所述红外热成像组件5的姿态,所述云台4可带动所述红外热成像组件5一同水平转动。通过所述调节杆6的伸缩调节可以驱动所述连接板7对应的边角处上下运动,从而起到调节所述红外热成像组件5的姿态的作用,同时所述云台4可水平周向转动并带动所述红外热成像组件5一同水平转动,从而调节所述红外热成像组件5的方位角度,这样可以比较方便在三维空间中对所述红外热成像组件5进行任意调节,从而实现巡检区域的全覆盖监测。如图2中所示,当某一根调节杆6的伸缩长度与其余的调节杆6的伸缩长度不同时(当不是所有的调节杆6的伸缩长度都相同时),
所述连接板7即可调整为对应的倾斜状态,再配合所述云台4水平周向转动,即可实现所述红外热成像组件5在三维空间为的姿态和方位角度调节。
31.如图3所示,在本实用新型的一个或多个实施例中,所述调节机构包括云台4、四根可伸缩运动的调节杆6和连接板7,所述云台4设置在所述无人机本体1的底部中间位置,并可水平周向转动,四根所述调节杆6的上端分别与所述云台4的下表面四周对应连接,四根所述调节杆6的下端分别与所述连接板7的四周边角处对应活动连接,所述红外热成像组件5设置在所述连接板7的下表面,且四根所述调节杆6可驱动所述连接板7运动,以调节所述红外热成像组件5的姿态,所述云台4可通过所述调节杆6带动所述红外热成像组件5一同水平转动。通过所述云台4可带通所述调节杆6连同所述红外热成像组件5一同水平转动,从而调节所述红外热成像组件5的方位角度,同时,所述调节杆6的伸缩调节可以驱动所述连接板7对应的边角处上下运动,从而起到调节所述红外热成像组件5的姿态的作用,这样可以比较方便在三维空间中对所述红外热成像组件5进行任意调节,从而实现巡检区域的全覆盖监测。
32.需要说明的是,本实施例中,所述连接板7优选为矩形,针对矩形的连接板7的四周边角处,分别设置一根调节杆6,但是,所述连接板7选用其他形状时,所述调节杆6的数量可以根据针对性调整,这里不再一一列举。
33.如图4和图5所示,在本实用新型的一个或多个实施例中,所述红外热成像组件5包括内部中空下端开口设置的外壳8、多根丝杠9、红外热成像仪,所述外壳8的内顶壁设有驱动电机10,所述外壳8内位于所述驱动电机10的下方设有支撑板11,所述外壳8的下端口内设有载板12,所述红外热成像仪设置在所述载板12的下表面,多根所述丝杠9设置在所述支撑板11与所述载板12之间,所述丝杠9的下端与所述载板12螺纹连接,所述丝杠9的上端向上穿过所述支撑板11并与所述驱动电机10的驱动端传动连接,所述驱动电机10可驱动所述丝杠9转动,以驱动所述载板12带动所述红外热成像仪从所述外壳8的下端口伸出,或者从所述外壳8的下端口外缩进至所述外壳8内。通过所述驱动电机10驱动所述丝杠9转动,所述丝杠9转动进而驱动所述载板12沿着所述丝杠9上下运动,从而调节所述红外热成像仪从所述外壳8的下端口伸出,或者从所述外壳8的下端口外缩进至所述外壳8内,方便在不工作时对所述红外热成像仪进行保护。
34.可选地,在本实用新型的一个或多个实施例中,所述外壳8的相对两侧内壁上竖向设有滑道,所述载板12的两端分别与对应一侧的滑道滑动连接,且当所述驱动电机10可驱动所述丝杠9转动时,所述载板12沿着所述滑道在所述外壳8内升降运动。通过在所述外壳8的相对两侧内壁上竖向设置滑道,这样当所述丝杠9转动进而驱动所述载板12沿着所述丝杠9上下运动时,所述载板12可以更加稳定的上下运动,从而保证所述红外热成像仪的监测稳定性。
35.在本实用新型的一个或多个实施例中,所述驱动电机10的驱动端设有主动轮13,所述丝杠9的上端设动从动轮14,所述主动轮13与所述从动轮14之间通过皮带15传动连接,且所述主动轮13可驱动所述从动轮14带动多个所述丝杠9同步转动。通过所述驱动电机10的驱动端驱动所述主动轮13转动,主动轮13通过所述皮带14带动所述从动轮14连同对应的所述丝杠9转动,从而实现所述载板12连同所述红外热成像仪升降运动。
36.可选地,在本实用新型的一个或多个实施例中,所述红外热成像组件5还包括透明
的保护罩16,所述保护罩16设置在所述外壳8的下端口处,当所述丝杠9驱动所述红外热成像仪从所述外壳8的下端口伸出时,所述保护罩16将所述红外热成像仪罩住。通过所述保护罩16可以对所述红外热成像仪起到保护作用,避免外力作用造成物理破坏,同时也可以起到防水防尘的作用,有利于提高监测准确性。
37.可选地,在本实用新型的一个或多个实施例中,所述可用于热成像的无人机还包括减震板17,所述减震板17设置在所述无人机本体1的底部中间位置处,且所述无人机本体1的底部中间位置与减震板17之间设有多个减震器18,所述调节机构设置在所述减震板17的下表面。通过所述减震板17和所述减震器18可以有效降低无人机在飞行过程中的物理振动对所述红外热成像仪造成的干扰,大大提高监测质量和监测精度。
38.这里,所述减震器18的数量可以根据实际情况灵活设置,优选地,多个所述减震器18均匀阵列设置在所述无人机本体1的底部中间位置与减震板17之间,以保证最佳的减震效果。
39.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。