1.本实用新型涉及轨道交通技术领域,特别涉及一种跨座式单轨车及其电磁导向系统、转向架。
背景技术:
2.跨坐式轨道车辆作为一种新型的城市交通工具,其应用越来越广泛。一般地,跨坐式轨道车辆具有导向轮、走行轮和稳定轮。走行轮始终与轨道的顶面接触,稳定轮用于提高车辆的平稳性,导向轮适于夹紧在单轨侧面,当车辆在轨道梁上运行时,导向轮和轨道梁之间接触,产生摩擦力,极易损耗。传统的跨坐式轨道车辆的导向轮与轨道的更换过程繁琐、操作不便,影响跨坐式轨道车辆的性能。
技术实现要素:
3.有鉴于此,本实用新型提出了一种跨座式单轨车及其电磁导向系统、转向架,用以解决现有导向系统中导向轮易磨损,且车体运行过程易晃动的技术问题。
4.为达到上述目的,本实用新型的技术方案是这样实现的:本实用新型提出了一种跨座式单轨车电磁导向系统,该电磁导向系统至少包括电磁导向控制器、第一传感器、第一斩波器和两个导向电磁铁,两个导向电磁铁对称设置于跨座式单轨车的转向架上层的前后两侧,每个所述导向电磁铁包括两个独立设置的第一线包,每个所述导向电磁铁的左部和右部均设置有导向点,每个所述导向点对应一个第一传感器和一个第一线包,所述电磁导向控制器与第一传感器连接,且其通过第一斩波器与第一线包连接。
5.进一步地,所述转向架上层包含四个导向点:第一导向点、第二导向点、第三导向点和第四导向点,所述第一导向点和第二导向点位于转向架上层的左部,所述第三导向点和第四导向点位于转向架上层的右部;所述第一斩波器的数量为两个:其中一个第一斩波器用于控制第一导向点和第二导向点,另一个第一斩波器用于控制第三导向点和第四导向点。
6.进一步地,所述第一斩波器包括a口、b口、c口、d口、e口、f口、第一igbt管q1、第二igbt管q2、第三igbt管q3、第四igbt管q4、第一开关s1、第二开关s2:所述a口和b口组成输入端口,用于接入外部直流电源;c口和d口组成第一输出口,用于连接第一导向点或第三导向点对应的第一线包;e口和f口组成第二输出口,用于连接第二导向点或第四导向点对应的第一线包;所述第一igbt管q1与第三igbt管q3串联,并与串联的第二igbt管q2与第四igbt管q4并联;所述第一开关s1连接第一输出口,所述第二开关s2连接第二输出口。
7.进一步地,所述转向架上层包含四个导向点:第一导向点、第二导向点、第三导向点和第四导向点,所述第一导向点和第二导向点位于转向架上层的左部,所述第三导向点和第四导向点位于转向架上层的右部;所述第一斩波器的数量为四个:每个第一斩波器用于控制一个导向点。
8.进一步地,所述电磁导向系统还包括电磁稳定控制器、第二斩波器、第二传感器和
两个稳定电磁铁,两个稳定电磁铁对称设置于所述转向架下层的前后两侧,每个所述稳定电磁铁至少包括一个第二线包,每个所述稳定电磁铁上至少设置有一个稳定点,每个所述稳定点对应一个第二传感器和一个第二线包,所述电磁稳定控制器分别与第二传感器和电磁导向控制器连接,且通过第二斩波器与第二线包连接。
9.进一步地,每个所述稳定电磁铁包括两个独立设置的第二线包,每个所述稳定电磁铁的左部和右部均设置有稳定点,每个所述稳定点对应一个第二传感器和一个第二线包,所述转向架下层包含四个稳定点:第一稳定点、第二稳定点、第三稳定点和第四稳定点,所述第一稳定点和第二稳定点位于转向架下层的左部,所述第三稳定点和第四稳定点位于转向架下层的右部;第二斩波器的数量均为两个:其中一个第二斩波器用于控制第一稳定点和第二稳定点,另一个第二斩波器用于控制第三稳定点和第四稳定点;
10.或所述稳定电磁铁包括一个第二线包,每个所述稳定点对应一个第二传感器和一个第二线包。
11.进一步地,所述稳定电磁铁与导向电磁铁平行设置,且位于同一侧的稳定电磁铁与导向电磁铁中稳定电磁铁设置于该导向电磁铁的正下方。
12.上述结构的跨座式单轨车电磁导向系统,相比现有技术,当上述电磁导向系统应用于跨座式单轨车,在轨道梁上运行时,导向电磁铁和轨道梁之间产生横向电磁吸引力,代替现有导向轮系统为车辆提供横向的导向力,通过该设置,即用电磁铁替换现有跨座式单轨车的导向轮系统,上述导向电磁铁在运行时不与轨道梁发生接触,即整车导向方向全程与轨道梁非接触,解决了现有导向轮的磨损问题。
13.在进一步地技术方案中,所述电磁导向系统还包括电磁稳定控制器、第二传感器和两个稳定电磁铁,稳定电磁铁与轨道梁之间产生的吸力能够产生抗翻力矩,抗翻力矩用于平衡车体受到横向扰动力将要发生翻滚的力矩,通过稳定电磁铁可明显减小车辆横向晃动,提升舒适性。
14.另一方面,本实用新型还提出了一种跨座式单轨车转向架,所述转向架包括行走系统、牵引系统、构架和导向系统,所述行走系统和牵引系统安装于构架上,所述构架跨设在轨道梁上方,且其前后两个侧梁为导向电磁铁、稳定电磁铁提供支撑,所述导向系统为其上所述的跨座式单轨车电磁导向系统,所述导向电磁铁与稳定电磁铁均与轨道梁有间隔地设置。
15.进一步地,所述行走系统包括单根转轴和走行轮,所述走行轮套设于单根转轴上,所述单根转轴可转动地安装于构架顶部,所述转轴上对应一个牵引系统;或所述行走系统包括两根转轴和走行轮,每根转轴上均套设有走行轮,两根转轴分别可转动地安装于构架顶部的左右两侧,每根转轴上对应一个牵引系统。
16.再一方面,本实用新型还提出了一种跨座式单轨车,包括车体和转向架,其特征在于,所述转向架为其上所述的跨座式单轨车转向架。
17.包括上述跨座式单轨车电磁导向系统的跨座式单轨车转向架显然具有使用寿命长、运行稳定的优点,在此不做赘述。
附图说明
18.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新
型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
19.图1为本实用新型一种跨座式单轨车电磁导向系统的立体结构示意图;
20.图2为本实用新型一种跨座式单轨车电磁导向系统另一方向的立体结构示意图;
21.图3为本实用新型一种跨座式单轨车电磁导向系统一实施例的结构框图;
22.图4为本实用新型一种跨座式单轨车电磁导向系统另一实施例的结构框图;
23.图5为本实用新型第一斩波器一实施例的电路图;
24.图6为本实用新型跨座式单轨车电磁导向系统的应用图;
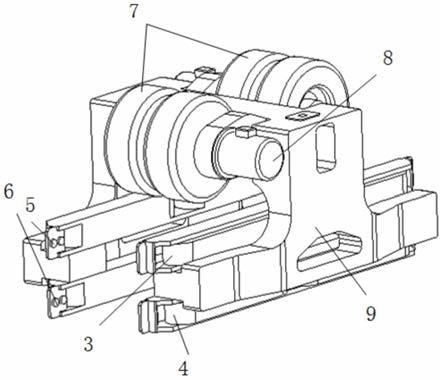
25.图7为本实用新型一种跨座式单轨车电磁导向系统又一实施例的立体结构示意图;
26.图8为本实用新型一种跨座式单轨车电磁导向系统再一实施例的结构框图;
27.图9为图7中第一线包和第二线包的分布图;
28.图10为本实用新型一种跨座式单轨车电磁导向系统另一实施例的结构框图;
29.图11为图10中第一线包的分布图;
30.图12为本实用新型跨座式单轨车的立体结构示意图。
具体实施方式
31.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
32.本实用新型中,使用的方位如“左”、“右”、“前”、“后”、“上”、“下”、、“顶”、“底”等方位均以图2所示的视图为基准。术语“第一”、“第二”主要用于区分不同的部件,但不对部件进行具体限制。
33.参见图1
‑
图4,一种跨座式单轨车电磁导向系统,包括导向电磁铁3、稳定电磁铁4、第一传感器5、第二传感器6、第一斩波器、第二斩波器、电磁导向控制器和电磁稳定控制器,导向电磁铁3设置于转向架2的上层,稳定电磁铁4设置于转向架2的下层,导向电磁铁3、稳定电磁铁4的数量均为两个,两个导向电磁铁3对称设置于转向架2的上层的前后两侧,两个稳定电磁铁4对称设置于转向架2的下层的前后两侧,两个稳定电磁铁4与两个导向电磁铁3平行设置,且位于同一侧的稳定电磁铁4和导向电磁铁3中稳定电磁铁4位于该导向电磁铁3的正下方,此时,转向架2上层包含两个导向电磁铁3,每一个导向电磁铁3包括两个独立设置的第一线包11,每个导向电磁铁3的左部和右部均设置有导向点,每个导向点对应一个第一传感器5和一个第一线包11,即一个转向架2包含四个导向点,参见图3,具体为:第一导向点、第二导向点、第三导向点和第四导向点,第一导向点和第二导向点位于转向架上层的左部,第三导向点和第四导向点位于转向架上层的右部,电磁导向控制器与第一传感器5连接,且其通过第一斩波器与第一线包11连接,转向架2的四个导向点获取的传感器信息进入电磁导向控制器中,电磁导向控制器通过控制两组导向电磁铁3,以保证车辆处于轨道梁10正中央;稳定电磁铁4包括两个独立设置的第二线包12,每个稳定电磁铁4的左部和右部均设置有稳定点,每个稳定点对应一个第二传感器6和一个第二线包12,即转向架2下层包含两个稳定电磁铁4,一个转向架2包含四个稳定点,具体为:第一稳定点、第二稳定点、第三稳定点和第四稳定点,第一稳定点和第二稳定点位于转向架下层的左部,第三稳定点和第四稳定点位于转向架下层的右部;电磁稳定控制器分别与第二传感器和电磁导向控制器连接
6连接,且通过第二斩波器与第二线包12连接,四个稳定点采集的传感器信息进入电磁稳定控制器中,电磁稳定控制器通过控制两组稳定电磁铁4,以保证车辆不发生翻滚。
34.当上述电磁导向系统应用于跨座式单轨车在轨道梁10上运行时,导向电磁铁3和轨道梁10之间产生横向电磁吸引力,代替现有导向轮系统为车辆提供横向的导向力,稳定电磁铁4与轨道梁10之间产生的吸力能够产生抗翻力矩,抗翻力矩用于平衡车体1受到横向扰动力将要发生翻滚的力矩,通过该设置,即用电磁铁替换现有跨座式单轨车的导向轮系统,上述导向电磁铁3和稳定电磁铁4在运行时不与轨道梁10发生接触,即整车导向方向全程与轨道梁10非接触,解决了现有导向轮的磨损问题,且通过稳定电磁铁4可明显减小车辆横向晃动,提升舒适性;此外,由于电磁导向控制器和电磁稳定控制器之间的连接可以实现信息的双向传递,通过安装在导向电磁铁3上的第一传感器5和稳定电磁铁4上的第二传感器6能够判断转向架2的位姿关系,并协调导向点和稳定点的输出:当车辆转弯时,导向电磁铁3和稳点电磁铁能够共同作用,为车辆提供更大的电磁导向力;当车辆需要稳定电磁力矩时,在稳定电磁铁4起作用的同时导向电磁铁3也能辅助作用,提高车辆的抗滚特性,并且导向电磁铁3和稳定电磁铁4能够相互起到冗余作用,当一种电磁铁故障时,另一种电磁铁能够提供备份。
35.优选地,在图3所示实施例中,电磁导向控制器通过4台第一斩波器控制两组导向电磁铁3,以保证车辆处于轨道梁10正中央,每个第一斩波器对应一个第一线包11,用于控制一个导向点;四个稳定点采集的传感器信息进入电磁稳定控制器中,电磁稳定控制器通过4台第二斩波器控制两组稳定电磁铁4,以保证车辆不发生翻滚,每个第二斩波器对应一个第二线包12,用于控制一个稳定点。需要说明的是,第一斩波器和第二斩波器的数量并不仅限于4台,还可为两台,当第一斩波器和第二斩波器的数量为两个时,其中一个第一斩波器用于控制第一导向点和第二导向点,另一个第一斩波器用于控制第三导向点和第四导向点,其中一个第二斩波器用于控制第一稳定点和第二稳定点,另一个第一斩波器用于控制第三稳定点和第四稳定点,具体参见图4。
36.同时,当第一斩波器的数量为两个时,参见图5,上述第一斩波器包括a口、b口、c口、d口、e口、f口、第一igbt管q1(insulated gate bipolar transistor,绝缘栅双极型晶体管)、第二igbt管q2、第三igbt管q3、第四igbt管q4、第一开关s1、第二开关s2,其中:a口和b口组成输入端口,用于接入外部直流电源;c口和d口组成第一输出口,用于连接第一导向点或第三导向点对应的第一线包;e口和f口组成第二输出口,用于连接第二导向点或第四导向点对应的第一线包;第一igbt管q1与第三igbt管q3串联,并与串联的第二igbt管q2与第四igbt管q4并联;第一开关s1连接第一输出口,第二开关s2连接第二输出口。本实用新型根据输出pwm(pulse width modulation,脉冲宽度调制)占空比不同,控制不同igbt管的导通情况,在第一线包11两端产生或正或负、电压值不等的电压,产生相应的电流从左至右(正向)或从右至左(负向)流过对应的第一线包,实现对中控制。
37.具体地,参见图6,第一传感器采集的间隙信号包括g1、g2、g3和g4,其中g1表示第一导向点的间隙信号,g2表示第二导向点的间隙信号,g3表示第三导向点的间隙信号,g4表示第四导向点的间隙信号,当转向架远离轨道梁一侧边,g1间隙变大时,电磁导向控制器输出pwm信号(具体为pwm_1信号),驱动控制第一igbt管q1、第四igbt管q4工作,闭合第一开关s1,同时关断第二igbt管q2、第三igbt管q3,并断开第二开关s2,此时第一导向点对应的第
一线包开始通电工作,正向电流i1经第一输出口输出到第一导向点对应的第一线包,产生电磁吸力f1,使转向架回到轨道梁中间位置;当转向架远离轨道梁另一侧边,即g2间隙变大时,电磁导向控制器输出pwm信号(具体为pwm_2信号),驱动控制第二igbt管q2和第三igbt管q3工作,闭合第二开关s2,同时关断第一igbt管q1、第四igbt管q4,并断开第一开关s1,此时第二导向点对应的第一线包开始通电工作,负向电流i2经第二输出口输出到第二导向点对应的第一线包,产生电磁吸力f2,使转向架回到轨道梁中间位置。同理,当转向架偏移轨道梁,致使g3间隙变大时,电磁导向控制器输出pwm信号(具体为pwm_1信号),驱动控制第一igbt管q1、第四igbt管q4工作,闭合第一开关s1,同时关断第二igbt管q2、第三igbt管q3,并断开第二开关s2,此时第三导向点对应的第一线包开始通电工作,正向电流i1经第一输出口输出到第三导向点对应的第一线包,产生电磁吸力f3,使转向架回到轨道梁中间位置;当当转向架偏移轨道梁,致使g4间隙变大时,电磁导向控制器输出pwm信号(具体为pwm_2信号),驱动控制第二igbt管q2和第三igbt管q3工作,闭合第二开关s2,同时关断第一igbt管q1、第四igbt管q4,并断开第一开关s1,此时第四导向点对应的第一线包开始通电工作,负向电流i2经第二输出口输出到第四导向点对应的第一线包,产生电磁吸力f4,使转向架回到轨道梁中间位置。
38.值得提及的是,在又一实施例中,当跨座式单轨车不需要较大导向力时,电磁导向系统可以在图1和图2所示实施例上进行优化减重,优选地可以减少稳定电磁铁4数量,此时,每个导向电磁铁3包括两个独立设置的第一线包11,每个导向电磁铁3的左部和右部均设置有导向点,每个导向点对应一个第一传感器5和一个第一线包11,稳定电磁铁4仅包括一个第二线包12,其上设置有一个稳定点,每个稳定点对应一个第二传感器6和一个第二线包12,则转向架2的上层配置有四个导向点(第一导向点、第二导向点、第三导向点和第四导向点),下层配置却两个稳定点(即第一稳定点和第二稳定点),具体参见图7
‑
图9。此时,转向架2的4个导向点的传感器信息进入电磁导向控制器中,电磁导向控制器通过2台第一斩波器控制四个第一线包11,以保证车辆处于轨道正中央,2个稳定点的传感器信息进入电磁稳定控制器中,电磁稳定控制器通过1台第二斩波器控制两个第二线包12,以保证车辆不发生翻滚。需要说明的是,此时,电磁稳定控制器也可通过2台第二斩波器分别控制两个第二线包12,以保证车辆不发生翻滚。
39.参见图10和图11,在该实施例中,在某些电磁导向力和电磁稳定力需要不大的情况下,可只需设置导向电磁铁3,即仅有四个导向点(第一导向点、第二导向点、第三导向点和第四导向点)即可,电磁导向控制器通过2台第一斩波器控制四个第一线包11,以保证车辆处于轨道正中央,导向电磁铁3同时提供抗翻滚力矩,以保证车辆不发生翻滚。当然,此处电磁导向控制器也可通过4台第一斩波器分别控制四个第一线包11,以保证车辆处于轨道正中央。
40.此外,值得提及的是,本实用新型中第一传感器5和第二传感器6结构相同,第一斩波器和第二斩波器结构相同。
41.另一方面,本实用新型还提出一种跨座式单轨车转向架,包括行走系统、牵引系统8、构架9和导向系统,行走系统和牵引系统8安装于构架9上,构架9跨设在轨道梁10上方,且其前后两个侧梁为导向电磁铁3、稳定电磁铁4提供支撑,导向系统为其上所述的跨座式单轨车电磁导向系统,导向电磁铁3与稳定电磁铁4均与轨道梁10有间隔地设置,其中,行走系
统坐落在轨道梁10上,支撑车体1;牵引系统8控制行走系统带动车体1前进;构架9将行走系统、导向系统和车体1连接在一起,并为车体1传递导向力和牵引力。为更好地跨设于轨道梁10上,构架9呈倒半框型结构。
42.上述转向架2可为双轴或单根转轴结构时,当其为单根转轴结构时,参见图7,行走系统包括单根转轴和走行轮7,走行轮7套设于单根转轴上,单根转轴可转动地安装于构架9顶部,转轴上对应一个牵引系统8;当转向架2可为双轴结构时,参见图1和图2,行走系统包括两根转轴和走行轮7,每根转轴上均套设有走行轮7,两根转轴分别可转动地安装于构架9顶部的左右两侧,每根转轴上对应一个牵引系统8。
43.再一方面,参见图12,本实用新型还提供一种跨座式单轨车,包括车体1和转向架2,该车体1底部的头端和尾端均安装有转向架2,跨座式单轨车通过构架9跨设在轨道梁10上,该转向架2为其上所述的跨座式单轨车转向架。跨座式单轨车的其他结构参照现有技术,此处不再赘述。优选地,该轨道梁10为钢梁。需要说明的是,当轨道梁10为水泥梁时,则需要在轨道梁10的侧面增设导向钢板。
44.总之,相比现有技术,本实用新型具有如下优点:
45.1)车辆导向时,导向电磁铁3全程与轨道非接触,解决了现有导向轮磨损和磨损导致的环境问题;
46.2)通过稳定电磁铁4的设置可明显减小车辆横向晃动,提升舒适性;
47.3)与现有车辆和轨道梁10结构兼容性好,估计无需做大的结构调整;
48.4)通过电磁导向控制器、电磁稳定控制器、第一传感器5和第二传感器6共同作用实现跨座式单轨的电磁导向控制,电磁导向系统无磨损,寿命长,节省运营维护费用;
49.5)电磁导向系统实现跨座式单轨转向架在侧面与轨道无接触,消除了现有技术中原系统导向轮和稳定轮对轨道的摩擦力,从而可提高车辆运行速度,且降低牵引系统能耗;
50.6)采用四个igbt管和两个可控开关(第一开关s1、第二开关s2)组成的第一斩波器,实现了一套斩波器对一组中两个导向电磁铁3的控制,提高了系统的集成性,降低了斩波器的体积、重量和成本。
51.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。