1.本实用新型涉及一种适用于智能柔性焊接机器人的底板焊接交换工作台,属于机械加工技术领域。
背景技术:
2.在当前的汽车焊接装备领域,为提高生产效率,提高焊接质量,改善工作环境,降低劳动强度和生产成本,机器人焊接技术已经被广泛应用。焊接时一般需要工作台,现有的机械加工中的双层工作台具有以下优点:当双层工作台中的一层在加工区域进行加工时,可以在另一层工作台上完成上、下料工作,两层工作台交换使用可以减少上、下料停机等待时间,在很大程度上提高了设备的工作效率。工作台的升降一般由多个驱动装置提供升降力来完成。
3.但是这种升降式的双层工作台非常不适合大型的工件,也有交换工作台是从不同的方向移动至焊接机器人处,占用空间大。
技术实现要素:
4.为了克服现有技术的不足,本实用新型提供了适用于智能柔性焊接机器人的底板焊接交换工作台,两个工件可在同一方向上来回工作,极大的减少了占地面积。
5.本实用新型是通过以下技术方案来实现的:
6.适用于智能柔性焊接机器人的底板焊接交换工作台,所述工作台上平行设置有第一轨道和第二轨道,所述第一轨道上设置有可在第一轨道内移动的第一夹具,所述第二轨道上设置有可在所述第二轨道内移动的支撑台,所述支撑台上设置有第二夹具,所述支撑台的高度高于第一夹具安装工件后的高度。
7.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,第一轨道和第二轨道均设置有两条,两条第一轨道位于两条第二轨道之间,所述支撑台具有位于第一夹具正上方的支撑面,第二夹具位于所述支撑面上。
8.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,所述第一夹具和第二夹具均包括安装板,所述安装板上设置有定位装置和压紧装置,所述定位装置包括第一驱动装置和第一驱动装置驱动的定位杆。
9.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,所述压紧装置包括第二驱动装置和第二驱动装置驱动的压紧块。
10.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,所述安装板上设置有多个支撑块,所述支撑块,所述支撑块上设置有支撑垫板。
11.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,还包括螺母定位装置,所述螺母定位装置包括主体,所述主体上设置有限位槽,所述主体上还设置有连接架,所述连接架上设置有位于限位槽上方的限位板。
12.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,所述主体包括第一板
和位于第一板上方的第二板,所述第一板上设置有所述限位槽,所述连接架设置在所述第二板上并伸出所述第二板。
13.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,所述限位槽为v型。
14.所述的适用于智能柔性焊接机器人的底板焊接交换工作台,所述主体上设置有螺纹孔,所述安装板上设置有多个螺纹孔。
15.本实用新型所达到的有益效果:
16.本实用新型的交换工作台采用平行设置的第一轨道和第二轨道,第一夹具和第二夹具的移动方向相同,只是高度不同,在待加工产品巨大的时候极大的减小了占地面积,降低了成本。
附图说明
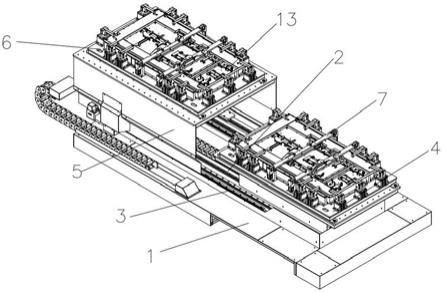
17.图1是本实用新型的结构示意图。
18.图2是图1的主视图。
19.图3是图2的右视图。
20.图4是第一夹具的结构示意图。
21.图5是螺母定位装置的放大图。
22.图中:1、工作台,2、第一轨道,3、第二轨道,4、第一夹具,5、支撑台,6、第二夹具,7、工件,8、安装板,9、定位杆,10、压紧块,11、支撑块,12、支撑垫板,13、螺母定位装置,14、主体,15、限位槽,16、连接架,17、限位板,18、螺纹孔。
具体实施方式
23.下面对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
24.如图所示,本实用新型的适用于智能柔性焊接机器人的底板焊接交换工作台,所述工作台1上平行设置有第一轨道2和第二轨道3,所述第一轨道2上设置有可在第一轨道2内移动的第一夹具4,所述第二轨道3上设置有可在所述第二轨道3内移动的支撑台5,所述支撑台5上设置有第二夹具6,所述支撑台5的高度高于第一夹具4安装工件7后的高度。
25.本实用新型的交换工作台在使用时,工件7安装在第一夹具4上,然后移动至智能柔性焊接机器人下方,进行焊接,此时,第二夹具6可进行另一工件7的装夹,第一夹具4焊接完成后,移动至装夹处,而第二夹具6移动至智能柔性焊接机器人下方,智能柔性焊接机器人调节初始位置后,根据设定开始进行焊接,如此重复。
26.具体地,工作台1如图1所示,第一轨道2和第二轨道3均设置有两条,两条第一轨道2位于两条第二轨道3之间,所述支撑台5具有位于第一夹具4正上方的支撑面,第二夹具6位于所述支撑面上。通过两条第一轨道2,第一夹具4移动稳定,通过支撑台5,第二夹具6位于第一夹具4的上方,在焊接的过程中,智能柔性焊接机器人只需要在高度方向上进行调节,然后即可进行焊接,不需要在别的方向进行定位,提高工作效率。
27.更进一步地,所述第一夹具4和第二夹具5均包括安装板8,所述安装板8上设置有定位装置和压紧装置,所述定位装置包括第一驱动装置和第一驱动装置驱动的定位杆9。所述定位装置至少设置有两个,通过定位杆9顶起对工件7进行定位。
28.更进一步地,所述压紧装置包括第二驱动装置和第二驱动装置驱动的压紧块10。压紧块10压住工件7,对工件7进行固定。
29.更进一步地,所述安装板8上设置有多个支撑块11,所述支撑块11上设置有支撑垫板12。工件7放置在支撑块11上,支撑块11与压紧块10配合,固定工件7,有些工件7(比如底板)比较薄,需要用支撑垫板12进行支撑,方便焊接。
30.更进一步地,还包括螺母定位装置13,所述螺母定位装置13包括主体14,所述主体14上设置有限位槽15,所述主体14上还设置有连接架16,所述连接架16上设置有位于限位槽15上方的限位板17。
31.加工时,需要安装多个螺母,采用螺母定位装置13对螺母进行定位,限位槽15对螺母进行限位,可以根据需要设定主体14上的限位槽15的数量,限位板17与限位槽15配合使用,可适应不同高度的螺母。
32.具体地,所述主体14包括第一板和位于第一板上方的第二板,所述第一板上设置有所述限位槽15,所述连接架16设置在所述第二板上并伸出所述第二板。
33.更进一步地,所述限位槽15为v型,贴合螺母,方便固定。
34.更进一步地,所述主体14上设置有螺纹孔,所述安装板8上设置有多个螺纹孔18,一螺杆拧入主体14和安装板8上的螺纹孔,从而将主体14固定在安装板8上,可根据需要设定主体14的数量。
35.本实用新型的工件的焊接步骤如下:
36.(1)装夹:工件1放置在第一夹具4的安装板8上,第一驱动装置驱动定位杆9上移,对工件1进行初定位;支撑块11与压紧块10配合对工件1进行夹紧;
37.(2)焊接:第一夹具4移动至智能柔性焊接机器人下方,进行焊接,此时,第二夹具6可进行另一工件7的装夹;
38.(3)交换:第一夹具4焊接完成后,移动至装夹处,而第二夹具6移动至智能柔性焊接机器人下方,智能柔性焊接机器人调节初始位置后,根据设定开始进行焊接,如此重复。
39.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。