1.本实用新型涉及设施园艺植保智能装备、大田作物植保智能装备和农业机器人技术领域,尤其涉及到除草机器人领域,具体是指一种激光智能除草机器人。
背景技术:
2.杂草是可持续农业生产的主要制约因素之一,杂草从土壤中吸收的养分与作物基本相同, 杂草对养分、水和阳光的竞争极大的危害了农作物的生长发育,杂草每年在农业生产中造成巨大的经济损失,而且杂草作为众多农田病虫害的传播媒介与中间宿主,会造成农田病虫害爆发,导致作物产量和质量降低。
3.目前在农业生产过程中,主要采取人工或机器喷洒化学药剂(除草剂)的方式进行田间除草作业,这种除草方式不仅会对当期作物的生长发育产生不良影响,而且残留的除草剂对土壤产生污染难以去除,影响后续作物的产量,尤其是对于间作轮作的农田,同时也会对作业人员的身体健康造成严重的威胁,收获后作物上的农药残留也会影响农产品的品质和安全性。因此,需要一种安全、高效、污染小的除草装置进行田间除草作业。
技术实现要素:
4.本实用新型针对现有技术的不足,提供一种激光智能除草机器人,利用激光除草,可以避免农药对农田的化学污染,对农田及其周围生态环境保护具有重要的意义,避免对作业人员的健康造成伤害,除草效率也更加高效。
5.本实用新型是通过如下技术方案实现的,提供一种激光智能除草机器人,包括安装有双轮驱动系统的车身,以及安装在车身上的图像采集处理系统、直角坐标激光除草装置和控制系统,图像采集处理系统与控制系统电性连接;
6.所述直角坐标激光除草装置包括激光发生器、x轴导轨和两y轴导轨,激光发生器的发射端朝下设置,y轴导轨与车身固接,x轴导轨与y轴导轨相互垂直,且均沿横向延伸;y轴导轨上安装有与x轴导轨固接的y轴直线滑座,y轴直线滑座上安装有驱动y轴直线滑座沿y轴导轨移动的y轴驱动装置,y轴驱动装置与控制系统电性连接;x轴导轨上安装有与激光发生器固接的x轴直线滑座,x轴直线滑座上安装有驱动x轴直线滑座沿x轴导轨移动的x轴驱动装置,x轴驱动装置与控制系统电性连接。
7.本方案通过双轮驱动系统实现整机的自行走,图像采集处理系统采集田间图像信息,使用yolov4神经网络识别出杂草的种类并得到杂草的像素坐标,后使用坐标转换算法将杂草图像的像素坐标转换为杂草的现实世界坐标,实现杂草精准定位;通过y轴驱动装置的驱动,使激光发生器沿y轴移动,通过x轴驱动装置的驱动,使激光发生器沿x轴移动,从而使得激光发射器可以遍历x轴导轨与y轴导轨构成的工作平面,激光发射器移动到杂草根茎的正上方后开始工作,并发射特定功率激光束到杂草茎秆处,降低杂草细胞活性,抑制杂草生长,实现激光热除草,在激光发射器移动过程中,通过x轴导轨和y轴导轨的设置,减小了整机的移动频率,从而减小了对作物的损伤。现有技术中多是整机移动实现激光对准,对作
物损伤较大,有的采用多轴型式,结构复杂,制作难度大,不适合农业推广应用。
8.作为优化,所述双轮驱动系统包括两万向轮和分别位于两万向轮前方的两驱动轮,每个驱动轮上均安装有轮毂电机。本优化方案的双轮驱动系统结构简单,在行进中,通过两个轮毂电机同步运行来实现机体的前进与后退,通过改变两个轮毂电机的差速来实现行进中的转弯避障与换行,通过设置万向轮,使机体的移动和转弯更加灵活。
9.作为优化,所述车身包括固定平台和固接于固定平台底面的机架,机架的四根支腿分别安装万向轮和驱动轮。本优化方案的车身结构简单,通过固定平台方便安装控制系统,通过机架方便安装万向轮和驱动轮。
10.作为优化,激光发生器的发射端安装有振镜,以方便激光聚焦,提高除草效率。
11.作为优化,x轴驱动装置包括安装在x轴直线滑座上的x轴步进电机,以及与x轴步进电机的输出轴传动连接的x轴传动轮;x轴直线滑座包括分别位于x轴导轨两侧且固接为一体的两x轴侧板,以及转动设置在两x轴侧板之间的x轴上滚轮和x轴下滚轮,x轴上滚轮、x轴下滚轮分别滑接于x轴导轨的上、下表面,x轴上滚轮与x轴传动轮同轴固接。本优化方案通过x轴步进电机提供x向的移动动力,方便控制,x轴步进电机带动x轴传动轮转动,从而带动x轴上滚轮同步转动,实现x轴直线滑座沿x轴导轨的移动,结构简单,制作和装配难度低,并且通过两相对设置的x轴侧板、x轴上滚轮、x轴下滚轮实现了对x轴直线滑座的沿x轴导轨周向的限位,保证了使用安全和稳定性,防止x轴直线滑座掉落。
12.作为优化,y轴驱动装置包括安装在y轴直线滑座上的y轴步进电机,以及与y轴步进电机的输出轴传动连接的y轴传动轮;y轴直线滑座包括分别位于y轴导轨两侧且固接为一体的两y轴侧板,以及转动设置在两y轴侧板之间的y轴上滚轮和y轴下滚轮,y轴上滚轮、y轴下滚轮分别滑接于y轴导轨的上、下表面,y轴上滚轮与y轴传动轮同轴固接。本优化方案通过y轴步进电机提供y向的移动动力,方便控制,y轴步进电机带动y轴传动轮转动,从而带动y轴上滚轮同步转动,实现y轴直线滑座沿y轴导轨的移动,结构简单,制作和装配难度低,并且通过两相对设置的y轴侧板、y轴上滚轮、y轴下滚轮实现了对y轴直线滑座的沿y轴导轨周向的限位,保证了使用安全和稳定性,防止y轴直线滑座掉落。
13.作为优化,控制系统包括设置在车身顶部的太阳能板、继电器、锂电池组、步进电机驱动器、轮毂电机驱动器和工控机;锂电池组与太阳能板、双轮驱动系统、图像采集处理系统、直角坐标激光除草装置、工控机电性连接,继电器串联于控制激光发射器的通断电路,步进电机驱动器与直角坐标激光除草装置中的y轴驱动装置、x轴驱动装置电性连接,轮毂电机驱动器与双轮驱动系统电性连接;锂电池组和太阳能板用于为双轮驱动系统、图像采集处理系统、直角坐标激光除草装置、工控机提供电能,继电器用于控制激光发射器的通断电,步进电机驱动器用于控制直角坐标激光除草装置中的步进电机运行,轮毂电机驱动器用于控制除草机器人的运行方向与速度。
14.本方案还提供一种使用上述激光智能除草机器人进行的除草方法,包括如下方面:
15.1、通过双轮驱动系统带动机器人移动,在机器人行进中,通过两个轮毂电机同步运行实现机器人的前进、后退,通过改变两个轮毂电机的差速来实现转弯避障与换行;
16.2、图像采集处理系统通过安装在车身前方的摄像头采集田间图像信息,使用yolov4神经网络识别出杂草的种类并得到杂草的像素坐标,然后使用坐标转换算法将杂草
的像素坐标转换为杂草的现实世界坐标,实现杂草精准定位;
17.3、通过y轴步进电机的动作改变激光发生器的y轴坐标,通过x轴步进电机的动作改变激光发生器的x轴坐标,使激光发射器移动到杂草根茎的正上方,激光发射器工作,发射特定功率激光束到杂草茎秆顶端分生组织处,利用激光的热效应在短时间内提高植物细胞中的水分温度,降低杂草细胞活性,有效抑制或减缓杂草的生长,实现激光热除草,在激光发射器的发射端设置振镜,用于激光聚焦;
18.4、通过锂电池组和太阳能板为双轮驱动系统、图像采集处理系统、直角坐标激光除草装置、工控机提供电能,通过继电器控制激光发射器的通断电,通过步进电机驱动器控制直角坐标激光除草装置中的步进电机运行,通过轮毂电机驱动器控制除草机器人的行进方向与速度;
19.5、操作人员通过蓝牙连接控制系统,在移动端远程获取除草机器人实时的工作情况与农田杂草分布信息图,操作人员选择除草机器人的工作模式,包括自主导航模式与手动操作模式,自主导航模式下除草机器人在指定工作路线下自主作业,手动操作模式由操作人员通过移动端上的远程操作软件手动控制除草机器人工作。
20.本实用新型的有益效果为:使用特定功率激光照射在植物茎秆顶端分生组织,使分生组织细胞内的水分子温度升高,降低杂草生长速率,具有结构简单,便于控制等特点;通过整机和激光发生器的移动,能够实现多种作物、不同行距除草,同时使农作物及其周围土壤环境受到的影响降到最低,提高了除草效率,避免了除草剂对工作人员健康造成的伤害;该实用新型设备操作简便,设计合理,可实现田间智能除草作业,通过图像采集处理系统的识别定位,对田间的杂草进行精确清除,同时生成农田杂草分布信息图,降低了劳动强度与杂草控制成本,提高了经济效益。
附图说明
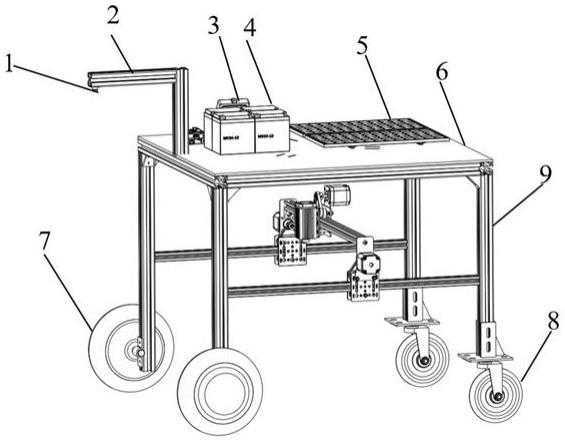
21.图1为本实用新型激光智能除草机器人结构示意图;
22.图2为直角坐标激光除草装置结构示意图;
23.图3为本实用新型激光智能除草机器人整体流程结构示意图;
24.图中所示:
25.1、摄像头,2、连接杆,3、工控机,4、锂电池组,5、太阳能板,6、固定平台,7、驱动轮,8、万向轮, 9、机架,10、y轴第一导轨,11、y轴第二导轨,12、y轴第一直线滑座,13、y轴第一步进电机,14、激光发生器,15、x轴步进电机,16、y轴第二步进电机,17、y轴第二直线滑座,18、振镜,19、x轴直线滑座,20、x轴导轨。
具体实施方式
26.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
27.如图1所示一种激光智能除草机器人,包括安装有双轮驱动系统的车身,以及安装在车身上的图像采集处理系统、直角坐标激光除草装置和控制系统,图像采集处理系统与控制系统电性连接。
28.双轮驱动系统包括两万向轮8和分别位于两万向轮前方的两驱动轮7,每个驱动轮上均安装有轮毂电机。车身包括固定平台6和固接于固定平台底面的机架9,机架的四根支
腿分别安装万向轮和驱动轮。在整机行进过程中,通过两个轮毂电机同步运行来实现机体的前进与后退,通过两个轮毂电机的差速实现行进中的转弯避障与换行。
29.如图2所示,直角坐标激光除草装置包括激光发生器14、x轴导轨20和两相互平行的y轴导轨,激光发生器的发射端朝下设置且安装有振镜18,用于激光聚焦。x轴导轨与y轴导轨相互垂直,且均沿横向延伸,x轴导轨位于y轴导轨的上方,y轴导轨的两端分别与车身固接。y轴导轨上安装有与x轴导轨固接的y轴直线滑座,y轴直线滑座上安装有驱动y轴直线滑座沿y轴导轨移动的y轴驱动装置,y轴驱动装置与控制系统电性连接。x轴导轨上安装有与激光发生器固接的x轴直线滑座19,x轴直线滑座上安装有驱动x轴直线滑座沿x轴导轨移动的x轴驱动装置,x轴驱动装置与控制系统电性连接。本实施例的两根y轴导轨分别为y轴第一导轨10和y轴第二导轨11,y轴第一导轨10和y轴第二导轨11相互平行,位于同一高度,且沿x轴向依次排布,y轴第一导轨10上的y轴直线滑座为y轴第一直线滑座12,y轴第二导轨11上的y轴直线滑座为y轴第二直线滑座17。
30.具体的,x轴驱动装置包括安装在x轴直线滑座19上的x轴步进电机15,以及与x轴步进电机的输出轴传动连接的x轴传动轮;x轴直线滑座包括分别位于x轴导轨两侧且固接为一体的两x轴侧板,以及转动设置在两x轴侧板之间的x轴上滚轮和x轴下滚轮,x轴上滚轮和x轴下滚轮的轮轴分别与两x轴侧板转动连接,x轴上滚轮、x轴下滚轮分别滑接于x轴导轨的上、下表面,x轴上滚轮与x轴传动轮同轴固接。
31.y轴驱动装置包括安装在y轴直线滑座上的y轴步进电机,以及与y轴步进电机的输出轴传动连接的y轴传动轮;y轴直线滑座包括分别位于y轴导轨两侧且固接为一体的两y轴侧板,以及转动设置在两y轴侧板之间的y轴上滚轮和y轴下滚轮,y轴上滚轮和y轴下滚轮的轮轴分别与两y轴侧板转动连接,y轴上滚轮、y轴下滚轮分别滑接于y轴导轨的上、下表面,y轴上滚轮与y轴传动轮同轴固接。y轴第一直线滑座12上的步进电机为y轴第一步进电机13,y轴第二直线滑座17上的步进电机为y轴第二步进电机16,第一步进电机12和第二步进电机16分别位于所在直线滑座的外侧,以给激光发生器的移动提供更多空间,增大激光发生器的辐射面积,减小整机的移动频率。
32.图像采集处理系统包括固接于固定平台前端的连接杆2,连接杆上设有延伸至固定平台前侧、上方的横杆,横杆的底面安装有与控制系统电性连接的摄像头1,图像采集处理系统通过摄像头采集田间图像信息,使用yolov4神经网络识别出杂草的种类并得到杂草的像素坐标,后使用坐标转换算法将杂草图像的像素坐标转换为杂草的现实世界坐标,实现杂草精准定位。
33.控制系统位于激光除草装置固定平台的上方,控制系统包括设置在车身顶部的太阳能板、继电器、锂电池组、步进电机驱动器、轮毂电机驱动器和工控机;锂电池组与太阳能板、双轮驱动系统、图像采集处理系统、直角坐标激光除草装置、工控机电性连接,继电器串联于控制激光发射器的通断电路,步进电机驱动器与直角坐标激光除草装置中的y轴驱动装置、x轴驱动装置电性连接,轮毂电机驱动器与双轮驱动系统电性连接;锂电池组和太阳能板用于为双轮驱动系统、图像采集处理系统、直角坐标激光除草装置、工控机提供电能,继电器用于控制激光发射器的通断电,步进电机驱动器用于控制直角坐标激光除草装置中的步进电机运行,轮毂电机驱动器用于控制除草机器人的运行方向与速度。
34.本实施例的激光智能除草机器人还包括人机交互系统,人机交互系统包括移动端
的远程操作软件与工控机上的配置软件,操作人员可以通过蓝牙连接控制系统,在移动端远程获取除草机器人实时的工作情况与农田杂草分布图,操作人员可以选择除草机器人的工作模式,包括自主导航模式与手动操作模式,自主导航模式下除草机器人在指定工作路线下自主作业,手动操作模式由操作人员通过远程移动端上的远程操作软件手动控制除草机器人工作。
35.一种使用本实施例激光智能除草机器人进行的除草方法,包括如下方面:
36.1、通过双轮驱动系统带动机器人移动,在机器人行进中,通过两个轮毂电机同步运行实现机器人的前进、后退,通过改变两个轮毂电机的差速来实现转弯避障与换行;
37.2、图像采集处理系统通过安装在车身前方的摄像头采集田间图像信息,使用yolov4神经网络识别出杂草的种类并得到杂草的像素坐标,然后使用坐标转换算法将杂草的像素坐标转换为杂草的现实世界坐标,实现杂草精准定位;
38.3、通过y轴步进电机的动作改变激光发生器的y轴坐标,通过x轴步进电机的动作改变激光发生器的x轴坐标,使激光发射器移动到杂草根茎的正上方,激光发射器工作,发射特定功率激光束到杂草茎秆顶端分生组织处,降低杂草细胞活性,抑制杂草生长,实现激光热除草,在激光发射器的发射端设置振镜,用于激光聚焦;
39.4、通过锂电池组和太阳能板为双轮驱动系统、图像采集处理系统、直角坐标激光除草装置、工控机提供电能,通过继电器控制激光发射器的通断电,通过步进电机驱动器控制直角坐标激光除草装置中的步进电机运行,通过轮毂电机驱动器控制除草机器人的行进方向与速度;
40.5、操作人员通过蓝牙连接控制系统,在移动端远程获取除草机器人实时的工作情况与农田杂草分布信息图,操作人员选择除草机器人的工作模式,包括自主导航模式与手动操作模式,自主导航模式下除草机器人在指定工作路线下自主作业,手动操作模式由操作人员通过移动端上的远程操作软件手动控制除草机器人工作。
41.本实用新型利用激光的热效应在短时间内提高植物细胞中的水分温度,有效抑制或减缓杂草的生长,避免了化学除草方式对土壤和作物的污染,结构简易,便于使用人员操作,能够在不同行距的作物间进行田间除草作业。
42.当然,上述说明也并不仅限于上述举例,本实用新型未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本实用新型的技术方案并非是对本实用新型的限制,参照优选的实施方式对本实用新型进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换都不脱离本实用新型的宗旨,也应属于本实用新型的权利要求保护范围。