1.本发明涉及农业收获机械,确切地说是一种火龙果收获机。
背景技术:
2.火龙果不仅味道香甜,还具有很高的营养价值,它集水果、花蕾、蔬菜、医药优点于一身。不但营养丰富、功能独特,很少有病虫害,几乎不使用任何农药都可以正常生长。因此,火龙果是一种绿色、健康果品和具有一定疗效的保健养分食品。
3.近年来,火龙果的营养价值越来越受人们关注,其栽种面积呈逐年上升趋势。
4.由于火龙果采摘期长,不能在成熟期集中采摘,依靠人工采摘成本高且效率不高,如果采摘不及时容易造成过熟果实自动脱落或变质造成浪费。此外,成熟的火龙果果实柔软,如若采摘方式不当,易造成果实损伤,影响商品品质。另一点,火龙果多种植在山地丘陵等地形较为复杂的地方且地表因便于管理而人工建设有地垄及排水道,传统轮转机械易翻车或者运动不平稳,不仅影响火龙果的采摘质量和果实品质,而且大大降低了工作效率。
技术实现要素:
5.本发明要解决的技术问题是提供一种火龙果收获机,该收获机行走稳定性高,收获采摘精准,提高采摘的质量,防止损伤或摔坏果实影响品质,提高收获效率。
6.为解决上述技术问题,本发明采用如下技术手段:一种火龙果收获机,包括行走机构,设置在行走机构上的车架组件,与车架组件相连接的机械臂组件、摄像机构,所述的行走机构座体前端两侧连接设置前轮可调支撑臂,行走机构座体后端两侧连接设置后轮可调支撑臂,两个前轮可调支撑臂呈八字型设置,前轮可调支撑臂的顶端与行走机构座体铰接连接,前轮可调支撑臂的底端与前轮的轮轴连接;两个后轮可调支撑臂呈八字型设置,后轮可调支撑臂的顶端与行走机构座体铰接连接,后轮可调支撑臂的底端连接履带式后轮;前轮可调支撑臂、后轮可调支撑臂均设有液压调节组件,液压调节组件一端与行走机构座体铰接连接,液压调节组件一端与前轮可调支撑臂或后轮可调支撑臂铰接连接,调节前轮可调支撑臂及后轮可调支撑臂的张角;所述的机械臂组件设有关节及连杆,连杆与连杆之间通过关节连接,关节处设有伺服电机;末端的连杆上设有相邻设置的剪切机构、夹持机构;剪切机构、夹持机构通过座体与机械臂连接,座体设有平行间隔设置的夹持座板、切割座板,夹持座板上设有夹持驱动电机,夹持驱动电机通过夹持齿轮组驱动输送爪连杆,输送爪连杆连接设置夹持输送爪,夹持输送爪成对设置;切割座板上设有切割驱动电机,切割驱动电机通过剪切齿轮组驱动切割刀连杆,切割刀连杆连接设置夹持切割刀,夹持切割刀成对设置;所述的车架组件设有机身支撑座,机身支撑座的前端设有前连接座,车架组件的中部设有控制系统安装仓、车架组件的后部设有收集仓;前连接座连接设置机械臂组件、摄像机构;控制系统安装仓安装控制系统。
7.采用上述技术方案的本发明,与现有技术相比,其突出的特点是:(1)两个前轮可调支撑臂呈八字型设置、两个后轮可调支撑臂呈八字型设置,且前
轮可调支撑臂、后轮可调支撑臂均设有液压调节组件,通过控制系统控制液压调节组件在不同的地形的情况下,可以调节轮与轮之间的间距,提高对不同地形的适应性。两个后轮之间的间隔大于两个前轮之间的间隔,可以进一步提高本机构的稳定性。
8.(2)通过设置机械臂组件设有关节、连杆及伺服电机,利用控制系统控制伺服电机工作使连杆旋转或转动;连杆末端设置夹持座板、切割座板,利用夹持座板设置夹持输送爪、夹持驱动电机及夹持齿轮组,利用夹持驱动电机及夹持齿轮组驱动夹持输送爪工作;通过设置切割座板,切割座板设置切割驱动电机、剪切齿轮组,利用切割驱动电机、剪切齿轮组驱动夹持切割刀工作;工作过程中,夹持输送爪对待切割的火龙果进行托举夹持,夹持切割刀切断火龙果根部果茎,完成夹持剪切,剪切后的火龙果底部处由夹持输送爪托举夹持,顶部由咬合的夹持切割刀限位。机械臂工作带动本发明的装置移动,将火龙果输送到收获机的收集仓处,再释放被剪切的火龙果。
9.(3)车架组件设有机身支撑座,利用机身支撑座设置前连接座、控制系统安装仓、车架、收集仓;便于部件的连接设置,前连接座连接设置机械臂组件、摄像机构;控制系统安装仓安装控制系统。
10.进一步的优选技术方案如下:所述的行走机构座体前端两侧分别设有前轮臂连接槽口,行走机构座体后端两侧分别设有后轮臂连接槽口;前轮臂连接槽口、后轮臂连接槽口均设有轮臂轴连接孔。
11.通过设置前轮臂连接槽口、后轮臂连接槽口,便于利用上述槽口分别连接前轮可调支撑臂、后轮可调支撑臂。
12.所述的行走机构座体的底面上设有4个铰接座,铰接座用于连接液压调节组件。
13.通过设置铰接座,便于利用铰接座连接设置液压调节组件。
14.所述的行走机构座体的中心处设有固定孔用于连接机身支撑座。
15.通过设置固定孔,便于利用固定孔用于连接机身支撑座。
16.所述的夹持齿轮组设有输送爪驱动齿轮,输送爪驱动齿轮由夹持驱动电机驱动,输送爪驱动齿轮驱动输送爪传动齿轮,输送爪传动齿轮带动输送爪连杆;夹持齿轮组设置在夹持座板外侧,夹持驱动电机的机体设置在夹持座板内侧。
17.通过设置输送爪驱动齿轮、输送爪传动齿轮,便于利用上述齿轮传动带动输送爪连杆动作,完成夹持工作;体积较大的夹持驱动电机设置在夹持座板内侧,方便本装置的移动行走,不会发生突出机体的部件被拦挡的情况。
18.所述的剪切齿轮组设有切割刀驱动齿轮,切割刀驱动齿轮由切割驱动电机驱动,切割刀驱动齿轮驱动切割刀传动齿轮,切割刀传动齿轮带动切割刀连杆;所述的剪切齿轮组设置在切割座板外侧,切割驱动电机的机体设置在切割座板内侧。
19.通过设置切割刀驱动齿轮、切割刀传动齿轮,便于利用上述齿轮传动带动夹持切割刀工作,完成剪切工作;体积较大的切割驱动电机设置在夹持座板内侧,方便本装置的移动行走,不会发生突出机体的部件被拦挡的情况。
20.所述的摄像机构设有摄像头,摄像头通过摄像支架与机身支撑座连接。
21.通过设置摄像支架,便于利用该支架连接设置摄像头,摄像头将图像传输给控制系统,控制系统控制本收获机进行完成收获。
22.所述的收集仓与机身支撑座一体成型。
23.上述设置,有利于减少部件的数量,使本机构更灵活。
附图说明
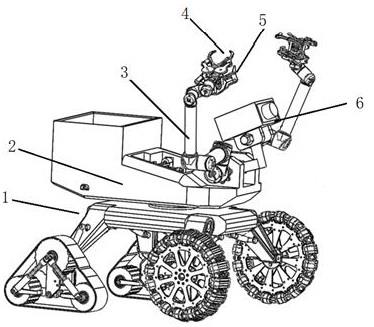
24.图1是本发明的立体图。
25.图2是本发明行走机构的立体图。
26.图3是图2中行走机构座体的立体图。
27.图4是行走机构的履带式后轮的立体图。
28.图5是图4中横向连接支架的立体图。
29.图6是本发明的车驾组件的立体图。
30.图7是本发明的机械臂组件的立体图图8是本发明的剪切机构、夹持机构的立体图。
31.图9是本发明的摄像机构的立体图。
32.图10本发明的控制系统的立体图。
33.附图标记说明:1-行走机构;101-前轮;102-前轮可调支撑臂;103-前轮臂铰接轴;104-固定孔;105-行走机构座体;106-后轮臂铰接轴;107-后轮可调支撑臂;108-履带式后轮;109-液压调节组件;110-前轮臂连接槽口;111-轮臂轴连接孔;112-后轮臂连接槽口;113-铰接座;114-第一支撑轮;115-第一轮轴;116-左减震弹簧;117-第二支撑轮;118-第二轮轴;119-第一轮架;120-后轮履带;121-横向连接支架;122-第三轴;123-第三支撑轮;124-右连接杆套;125-右减震弹簧;126-第二轮架;127-左侧弹簧;128-轴套;129-右侧弹簧;130-第三轮架。
34.2-车架组件; 201-机身支撑座;202-收集仓;203-控制系统安装仓;204-前连接座;3-机械臂组件;301-连接座;302-关节;303-连杆;4-剪切机构; 401-座板连接支柱;402-切割驱动电机;403-切割座板;404-切割刀传动齿轮;405-切割刀连杆;406-夹持切割刀;5-夹持机构;501-夹持输送爪;502-输送爪连杆;503-输送爪传动齿轮;504-输送爪驱动齿轮;505-夹持座板;506-夹持驱动电机。
35.6-摄像机构:601-摄像头;602-摄像支架。
36.7-控制系统;701-智能控制芯片;702-外接线接线口;703-滤波电阻;704-可充蓄电池;705-控制按钮;706-内输入接线口。
具体实施方式
37.下面结合实施例,进一步说明本发明。
38.参见图1-10可知,本发明的一种火龙果收获机,由行走机构1、车架组件2、机械臂组件3、剪切机构4、夹持机构5、摄像机构6及控制系统7组成;其中,行走机构1,设置在行走机构1上的车架组件2,与车架组件2相连接的机械臂组件3、摄像机构6,行走机构座体105前端两侧连接设置前轮可调支撑臂102,行走机构座体105后端两侧连接设置后轮可调支撑臂107,两个前轮可调支撑臂102呈八字型设置,前轮可调支撑臂102的顶端与行走机构座体
105铰接连接,前轮可调支撑臂102的底端与前轮101的轮轴连接;两个后轮可调支撑臂107呈八字型设置,后轮可调支撑臂107的顶端与行走机构座体105铰接连接,后轮可调支撑臂107的底端连接履带式后轮108;前轮可调支撑臂102、后轮可调支撑臂107均设有液压调节组件109,液压调节组件109一端与行走机构座体105铰接连接,液压调节组件109一端与前轮可调支撑臂102或后轮可调支撑臂107铰接连接,调节前轮可调支撑臂102及后轮可调支撑臂107的张角;机械臂组件3设有关节302及连杆303,连杆303与连杆303之间通过关节302连接,关节302处设有伺服电机;末端的连杆303上设有相邻设置的剪切机构4、夹持机构5;剪切机构4、夹持机构5通过座体与机械臂连接,座体设有平行间隔设置的夹持座板505、切割座板403,夹持座板505上设有夹持驱动电机506,夹持驱动电机506通过夹持齿轮组驱动输送爪连杆502,输送爪连杆502连接设置夹持输送爪501,夹持输送爪501成对设置;切割座板403上设有切割驱动电机402,切割驱动电机402通过剪切齿轮组驱动切割刀连杆405,切割刀连杆405连接设置夹持切割刀406,夹持切割刀406成对设置;车架组件2设有机身支撑座201,机身支撑座201的前端设有前连接座204,车架组件2的中部设有控制系统7安装仓203、车架组件2的后部设有收集仓202;前连接座204连接设置机械臂组件3、摄像机构6;控制系统7安装仓203安装控制系统7。
39.参见图1-图5可知,通过设置前轮臂连接槽口110、后轮臂连接槽口112,便于利用上述槽口分别连接前轮可调支撑臂102、后轮可调支撑臂107。行走机构座体105的底面上设有4个铰接座113,铰接座113用于连接液压调节组件109。通过设置铰接座113,便于利用铰接座113连接设置液压调节组件109。行走机构座体105的中心处设有固定孔104用于连接机身支撑座201。通过设置固定孔104,便于利用固定孔104用于连接机身支撑座201。行走机构座体105前端两侧分别设有前轮臂连接槽口110,行走机构座体105后端两侧分别设有后轮臂连接槽口112;前轮臂连接槽口110、后轮臂连接槽口112均设有轮臂轴连接孔111。收集仓202与机身支撑座201一体成型。上述设置,有利于减少部件的数量,使本机构更灵活。
40.履带式后轮108,呈三角状设置,能够适应山地丘陵等地形较为复杂的地表。履带式后轮108设有呈等腰三角形设置的三个支撑轮,三个支撑轮中一个为主动轮由电机驱动。通过设置三个支撑轮,利用三个支撑轮支撑后轮履带20,履带式后轮8的设置,进一步提高本装置对不同地形的适应性、稳定性;三个支撑轮中一个由电机驱动,便于控制。三个支撑轮中,顶部的支撑轮为第一支撑轮114,底部前侧为第二支撑轮117,底部后侧为第三支撑轮123,三个支撑轮分别通过第一轮轴115、第二轮轴118、第三轮轴122连接,第一轮轴115与第二轮轴118之间通过左减震弹簧116、左连接杆套连接,第一轮轴115与第三轮轴122之间通过右减震弹簧125、右连接杆套124连接;第二轮轴118与第三轮轴122之间通过横向连接支架121连接。通过设置左减震弹簧116、右减震弹簧125,可以利用弹簧提高本机构运动的平稳性。横向连接支架121设有第二轮架126、第三轮架130;第二轮架126、第三轮架130之间设有连接杆,连接杆的两端与第二轮架126、第三轮架130活动连接,使第二支撑轮117、第三支撑轮123受力时的轮间距可变,连接杆上设有左侧弹簧127、右侧弹簧129,左侧弹簧127使第二轮复位;右侧弹簧129使第三轮复位。通过设置连接杆,且连接杆的两端与第二轮架126、第三轮架130活动连接,从而可以使使第二支撑轮117、第三支撑轮123受力时的轮间距可变,提高本机构运动的平稳性。的连接杆的中部设有轴套128,轴套128与第一轮架119的底端连接,第一轮架119的顶端连接第一支撑轮114。通过设置轴套128,便于利用轴套28连接
设置第一轮架119。前轮101采用万向轮可以360度方位旋转,提高了机械的运行平稳性。
41.参见图1、图6可知,机身支撑座201安装有可充蓄电池704,与其他机构间用螺栓紧固件连接。支撑座侧面开有电池充电口和走线槽。通过将电池电能输出到电机,通过电机把电能转换为机械能,驱动整个机械的各种运动,具有能源清洁、输出稳定、动力强劲的特点。
42.参见图1、图7可知,伺服电机启动时,机械臂根据电动机转速和控制系统7信号的控制来运动,带动连杆,连杆作为连接行走机构1的关节302,为移动提供所需的位移,同时还起支撑作用。具有控制的实时性、准确性等特点。
43.五轴关节302型机械臂机构,伺服电机控制机械臂的移动和旋转,从而带动夹持装置的运动,实现火龙果从夹持到放入收集仓202这一系列的运动需求,平稳性高,运动灵活且准确。当火龙果被限位切割机构切断果茎,火龙果在剪切机构4、夹持机构5的共同夹持下,随机械臂运动到收集仓202上方,并被放入收集仓202,保护火龙果不被机械损害并且利于人员收集。
44.参见图1、图8可知,夹持齿轮组设有输送爪驱动齿轮504,输送爪驱动齿轮504由夹持驱动电机506驱动,输送爪驱动齿轮504驱动输送爪传动齿轮504503,输送爪传动齿轮504503带动输送爪连杆502;夹持齿轮组设置在夹持座板505外侧,夹持驱动电机506的机体设置在夹持座板505内侧。通过设置输送爪驱动齿轮504、输送爪传动齿轮504503,便于利用上述齿轮传动带动输送爪连杆502动作,完成夹持工作;体积较大的夹持驱动电机506设置在夹持座板505内侧,方便本装置的移动行走,不会发生突出机体的部件被拦挡的情况。剪切齿轮组设有切割刀驱动齿轮,切割刀驱动齿轮由切割驱动电机402驱动,切割刀驱动齿轮驱动切割刀传动齿轮404,切割刀传动齿轮404带动切割刀连杆405;剪切齿轮组设置在切割座板403外侧,切割驱动电机402的机体设置在切割座板403内侧。通过设置切割刀驱动齿轮、切割刀传动齿轮404,便于利用上述齿轮传动带动夹持切割刀406工作,完成剪切工作;体积较大的切割驱动电机402设置在夹持座板505内侧,方便本装置的移动行走,不会发生突出机体的部件被拦挡的情况。
45.夹持切割刀406整体为爪型,夹持切割刀406具有锋利的刀锋,爪型结构可以作为辅助夹持机构5,防止剪断时果实掉落,两片刀页用两头螺栓固定连接;切割机构,通过多个不同传动比的齿轮啮合传动,切割刀连杆405和夹持切割刀406聚拢,从而剪断火龙果果茎。其中切割驱动电机402为伺服电机,通过接线与控制系统7相连,从而实现了火龙果收获的精准性要求,而且电机转速可根据识别系统调节,最大限度的避免机械对果实的损伤。设置在切割座板403的切割刀连杆405在工作过程中还起到限位作用,其整体为两端略宽,中部稍窄的骨形,一端与夹持切割刀406连接,另一端与切割座板403连接。齿轮传动使切割刀连杆405转过一定的角度,从而使两片刀页聚拢切割和张开,实现切割的动作。
46.夹持输送爪501,适用火龙果果型,同时具有夹持和松紧的功能,有一定的力约束和形状约束,保证被夹持果在移动、停留和装入过程中,不改变姿态。夹持输送爪501在传动机构中,夹持输送爪501绕支点做圆弧运动,同时对火龙果果实进行夹紧和定心,夹持输送爪501做远离运动时,火龙果落入收集仓202。
47.参见图1、图9可知,摄像机构6设有摄像头601,摄像头601通过摄像支架602与机身支撑座201连接。通过设置摄像支架602,便于利用该支架连接设置摄像头601,摄像头601将图像传输给控制系统7,控制系统7控制本收获机进行完成收获。
48.摄像头601,摄取火龙果的位置、大小、成熟程度等数据,交由智能控制芯片701处理。
49.参见图10可知,控制系统7包括:智能控制芯片701、外接线接线口703702、滤波电阻、可充蓄电池704、控制按钮705及内输入接线口706。
50.智能控制芯片701,通过设定的程序对摄像头601和传感器的信号数据进行处理,并判断出实现功能所需的指令信号并传输到执行机构;外接线接线口703702及内输入接线口706,将收集的信号输入到处理系统,将输出的信号输出到执行机构;滤波电阻、控制按钮705等辅助部件,辅助控制系统7实现相应的功能。
51.采用上述技术方案的本发明,与现有技术相比,其突出的特点是:(1)两个前轮可调支撑臂102呈八字型设置、两个后轮可调支撑臂107呈八字型设置,且前轮可调支撑臂102、后轮可调支撑臂107均设有液压调节组件109,通过控制系统7控制液压调节组件109在不同的地形的情况下,可以调节轮与轮之间的间距,提高对不同地形的适应性。两个后轮之间的间隔大于两个前轮101之间的间隔,可以进一步提高本机构的稳定性。
52.(2)通过设置机械臂组件3设有关节302、连杆及伺服电机,利用控制系统7控制伺服电机工作使连杆旋转或转动;连杆末端设置夹持座板505、切割座板403,利用夹持座板505设置夹持输送爪501、夹持驱动电机506及夹持齿轮组,利用夹持驱动电机506及夹持齿轮组驱动夹持输送爪501工作;通过设置切割座板403,切割座板403设置切割驱动电机402、剪切齿轮组,利用切割驱动电机402、剪切齿轮组驱动夹持切割刀406工作;工作过程中,夹持输送爪501对待切割的火龙果进行托举夹持,夹持切割刀406切断火龙果根部果茎,完成夹持剪切,剪切后的火龙果底部处由夹持输送爪501托举夹持,顶部由咬合的夹持切割刀406限位。机械臂工作带动本发明的装置移动,将火龙果输送到收获机的收集仓202处,再释放被剪切的火龙果。
53.(3)车架组件2设有机身支撑座201,利用机身支撑座201设置前连接座204、控制系统7安装仓203、车架、收集仓202;便于部件的连接设置,前连接座204连接设置机械臂组件3、摄像机构6;控制系统7安装仓203安装控制系统7。
54.以上所述仅为本发明较佳可行的实施例而已,并非因此局限本发明的权利范围,凡运用本发明说明书及附图内容所作的等效结构变化,均包含于本发明的权利范围之内。