1.本发明属于机器抓取技术领域,特别涉及一种全柔性接触的末端夹持器。
背景技术:
2.机器人领域作为当前的研究热点,其抓手作为末端执行机构,依据不同的工作环境,具有广泛的应用研究价值。
3.众所周知,在实现对于特定物体的抓取工作时,要求避免对被抓取物体的表面造成微观或宏观的破坏,影响物体的使用性能。而柔性抓取机构凭借变刚度、使用特殊材料等一系列技术,能够在夹取时形成更加贴合的接触方式,有效的避免了传统刚性夹爪会对物体接触表面造成破坏这一问题。因此,本文提出了一种全柔性末端抓取夹持器,在抓取过程中不影响被抓物体的表面完整性,同时还具有灵活的使用性能,使用不同抓取场景,增加抓取的自适应性。
技术实现要素:
4.针对以上情况,本发明提供了一种全柔性接触的末端夹持器,通过旋转驱动圆盘带动柔性转动体的一端沿导向滑槽周向转动,使得多个柔性转动体逐渐向内收缩形成封闭的夹取空间,依靠柔性转动体自身的弹性以及韧性对被夹取物体产生柔性接触,实现柔性抓取过程,具有使用灵活、适用范围广及适应性强等优点。
5.本发明采用的技术方案是一种全柔性接触的末端夹持器,其包括第一固定圆盘、多个柔性转动体、第二固定圆盘、立柱、立柱连接件和旋转驱动圆盘,所述第一固定圆盘的中间处设有第一通孔,所述第二固定圆盘的中间处设有第二通孔,且所述第二通孔的圆周方向均布设有导向滑槽,所述第二固定圆盘设于所述第一固定圆盘上方,且所述第一固定圆盘和第二固定圆盘之间通过连接螺栓连接;所述立柱连接件包括连接凸台和设于所述连接凸台上的连接杆,多个所述柔性转动体均布环绕设于所述第一固定圆盘和第二固定圆盘之间共同组成单层柔性夹持件,且每个所述柔性转动体的第一端均与所述第一固定圆盘连接,每个所述柔性转动体的第二端相互交叉且对应设于所述立柱连接件的连接凸台上,所述立柱设于所述导向滑槽中,且所述立柱的第一端插入所述连接杆中,所述柔性转动体的第一端面与所述连接凸台的上端面重合,所述柔性转动体的第二端面与所述立柱的下端面重合;所述旋转驱动圆盘的中间处设有圆盘通孔,且所述圆盘通孔的圆周方向均布设有多个圆盘导向槽,所述旋转驱动圆盘设于所述第二固定圆盘的上方,且所述立柱的第二端插入所述圆盘导向槽中。
6.优选地,所述导向滑槽的形状与所述柔性转动体第二端的运动轨迹相同。
7.进一步地,所述导向滑槽能采用直线型、弧形导向滑槽,亦能采用折线形和多段曲线形导向滑槽。
8.优选地,所述第一固定圆盘的圆盘直径等于所述第二固定圆盘的圆盘直径。
9.优选地,所述立柱的直径等于所述导向滑槽的槽宽,且所述立柱的直径等于所述
圆盘导向槽的槽宽。
10.进一步地,所述立柱与所述立柱连接件之间设有多个所述柔性转动体,且多个所述柔性转动体亦能相互交叉、层层叠加在所述立柱与所述立柱连接件之间共同组成多层柔性夹持件。
11.进一步地,末端夹持器能由多个末端夹持器模块化组装构成,且所述旋转驱动圆盘的下端面均布设有连接孔,所述旋转驱动圆盘的上端面均布设有连接柱,且相邻两个所述旋转驱动圆盘的连接柱插入所述连接孔中。
12.本发明的特点和有益效果是:
13.1、本发明提供的一种全柔性接触的末端夹持器,通过旋转驱动圆盘带动柔性转动体的一端沿导向滑槽周向转动,使得多个柔性转动体逐渐向内收缩形成封闭的夹取空间,依靠柔性转动体自身的弹性以及韧性对被夹取物体产生柔性接触,实现柔性抓取过程,具有使用灵活、适用范围广及适应性强等优点。
14.2、本发明提供的一种全柔性接触的末端夹持器,可以在立柱与立柱连接件之间设置多层柔性夹持件,进而在抓取工件过程中,有利于增加被夹工件的接触面积,提高了工作的可靠性。
15.3、本发明提供的一种全柔性接触的末端夹持器,通过插销、卡槽等连接方式,可以将多个末端夹持器模块化组合,多个末端夹持器可以共用最上端的旋转驱动圆盘进行驱动,有利于抓取具有一定长度的工件。
附图说明
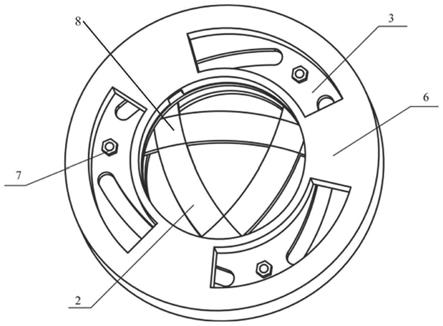
16.图1是本发明全柔性接触的末端夹持器的整体结构示意图;
17.图2是本发明的第一固定圆盘和第二固定圆盘连接示意图;
18.图3是本发明的立柱连接件结构示意图;
19.图4是本发明的旋转驱动圆盘结构示意图;
20.图5是本发明的多层柔性转动体示意图;
21.图6是本发明的多个末端夹持器模块化组合示意图。
22.主要附图标记:
23.第一固定圆盘1;第一通孔11;柔性转动体2;第二固定圆盘3;第二通孔31;导向滑槽32;立柱4;立柱连接件5;连接凸台51;连接杆52;旋转驱动圆盘6;圆盘通孔61;圆盘导向槽62;连接柱64;连接螺栓7;单层柔性夹持件8。
具体实施方式
24.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
25.本发明提供一种全柔性接触的末端夹持器,如图1和图2所示,其包括第一固定圆盘1、多个柔性转动体2、第二固定圆盘3、立柱4、立柱连接件5和旋转驱动圆盘6,第一固定圆盘1的中间处设有第一通孔11,第二固定圆盘3的中间处设有第二通孔31,且第二通孔31的圆周方向均布设有导向滑槽32,第二固定圆盘3设于第一固定圆盘1上方,且第一固定圆盘1和第二固定圆盘3之间通过连接螺栓7连接。
26.在一种优选方式中,导向滑槽32的形状与柔性转动体2第二端的运动轨迹相同。
27.优选地,导向滑槽32能采用直线型、弧形导向滑槽,亦能采用折线形和多段曲线形导向滑槽,进而控制柔性转动体2的伸缩和变形,以适应不同的抓取模式。
28.优选地,第一固定圆盘1的圆盘直径等于第二固定圆盘3的圆盘直径。
29.如图3所示,立柱连接件5包括连接凸台51和设于连接凸台51上的连接杆52,多个柔性转动体2均布环绕设于第一固定圆盘1和第二固定圆盘3之间共同组成单层柔性夹持件8,且每个柔性转动体2的第一端均与第一固定圆盘1连接,每个柔性转动体2的第二端相互交叉且对应设于立柱连接件5的连接凸台51上,立柱4设于导向滑槽32中,且立柱4的第一端插入连接杆52中,连接杆52与立柱4的第一端的通孔间隙配合相连,柔性转动体2的第一端面与连接凸台51的上端面重合,柔性转动体2的第二端面与立柱4的下端面重合。
30.在一种优选方式中,立柱4的直径等于导向滑槽32的槽宽,且立柱1的直径等于圆盘导向槽62的槽宽。
31.如图4所示,旋转驱动圆盘6的中间处设有圆盘通孔61,且圆盘通孔61的圆周方向均布设有多个圆盘导向槽62,旋转驱动圆盘6设于第二固定圆盘3的上方,且立柱4的第二端插入圆盘导向槽62中。
32.如图5所示,立柱4与立柱连接件5之间设有多个柔性转动体2,且多个柔性转动体2亦能相互交叉、层层叠加在立柱4与立柱连接件5之间共同组成多层柔性夹持件8。可选用材料为弹性布料、纤维、橡胶、线材、塑料、柔性材料等,以适用于不同的工作环境,使得抓手的适用性更高。同时通过设置多层柔性夹持件,进而在抓取工件过程中,有利于增加被夹工件的接触面积,提高了工作的可靠性。
33.如图6所示,末端夹持器能由多个末端夹持器模块化组装构成,且旋转驱动圆盘6的下端面均布设有连接孔,旋转驱动圆盘6的上端面均布设有连接柱64,且相邻两个旋转驱动圆盘6的连接柱64插入连接孔中。通过插销、卡槽等连接方式,可以将多个末端夹持器模块化组合,多个末端夹持器可以共用最上端的旋转驱动圆盘6进行驱动,有利于抓取具有一定长度的工件。
34.本发明的具体操作步骤如下:
35.实施例1
36.如图1~图4所示,本发明的一种全柔性接触的末端夹持器,其包括第一固定圆盘1、多个柔性转动体2、第二固定圆盘3、立柱4、立柱连接件5和旋转驱动圆盘6。通过驱动旋转驱动圆盘6转动可以带动圆盘导向槽62及导向滑槽32中的立柱4按照固定轨迹运动,而多个柔性转动体2依照固定轨迹,实现径向的收缩,依据收缩角度的大小以适应不同尺寸的不同物体,从而实现整机运转,完成夹取动作。当完成工件夹取工作之后,驱动旋转驱动圆盘6转动,可以实现多个柔性转动体2径向恢复至初始状态。
37.实施例2
38.如图5所示,本发明的一种全柔性接触的末端夹持器,通过在立柱4与立柱连接件5之间相互交叉、层层叠加设置多个柔性转动体2组成的多层柔性夹持件8,有利于在抓取工件过程中,增加被夹工件的接触面积,提高了工作的可靠性。
39.实施例3
40.如图6所示,本发明的一种全柔性接触的末端夹持器,通过插销、卡槽等连接方式,
将多个末端夹持器模块化组装,多个末端夹持器可以共用最上端的旋转驱动圆盘6进行驱动,有利于抓取具有一定长度的工件。
41.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。