1.本发明涉及穿戴设备技术领域,具体涉及一种下肢可穿戴柔性助力装置。
背景技术:
2.可穿戴柔性助力服辅助系统主要运用机械结构、传感信息、控制系统、新能源和新开发的材料等技术,构建人体的运动和作业辅助系统。目前,现有的外骨骼多数是刚性外骨骼,而刚性外骨骼一般机构复杂,质量较大,舒适性差、响应速度慢,对结构件要求较高,能源需求也较大。而可穿戴的柔性助力服助力系统,结构件较少,系统比较轻便、灵活,穿着舒适性与贴合性都比刚性外骨骼要好,因此可穿戴的柔性助力服更具优势。现有的可穿戴的柔性下肢助力机器人将驱动设备集中在腰背处,不仅布线复杂,而且在人体向前运动的时候,连接大腿和驱动电机的拉线向身后上方收缩,其髋关节向上屈曲的力臂较小,所需电机的功率较大,驱动效果并不理想。
3.本发明设计了一种下肢可穿戴柔性助力装置,将柔性绳传动技术和柔性穿戴引入到下肢助力领域,可以高效节省体力,使人体步行状态更加自然,设备运行效率更高。
技术实现要素:
4.本发明设计了一种下肢可穿戴柔性助力装置,将柔性绳传动技术和柔性穿戴引入到下肢助力领域,以解决上述背景技术中描述的问题。
5.要解决上述技术问题,本发明的技术方案为:一种下肢可穿戴柔性助力装置,包括腰带、左侧电机ⅰ、左侧电机ⅱ、右侧电机ⅰ、右侧电机ⅱ、电池、控制器、左侧提升拉线ⅰ、左侧提升拉线ⅱ、右侧提升拉线ⅰ、右侧提升拉线ⅱ、左侧第一固定带、左侧第二固定带、右侧第一固定带、右侧第二固定带,所述腰带穿戴于人体的腰部,所述左侧电机ⅰ、左侧电机ⅱ、右侧电机ⅰ、右侧电机ⅱ分别设置于腰带的左前,左后,右前,右后四个部位;电池、控制器设置于腰带的前部,电池为控制器和各电机供电,控制器控制各电机的转动;所述左侧电机ⅰ、左侧电机ⅱ、右侧电机ⅰ、右侧电机ⅱ的输出端对应连接左侧提升拉线ⅰ、左侧提升拉线ⅱ、右侧提升拉线ⅰ、右侧提升拉线ⅱ的一端,可实现拉线的伸缩;所述左侧提升拉线ⅰ、左侧提升拉线ⅱ、右侧提升拉线ⅰ、右侧提升拉线ⅱ的另一端对应连接左侧第一固定带、左侧第二固定带、右侧第一固定带、右侧第二固定带;所述左侧第一固定带、左侧第二固定带、右侧第一固定带、右侧第二固定带分别穿戴于左侧大腿、左侧小腿、右侧大腿、右侧小腿;所述左侧提升拉线ⅰ、右侧提升拉线ⅰ分别与左侧第一固定带、右侧第一固定带的连接点为对应的固定带前部,所述左侧提升拉线ⅱ、右侧提升拉线ⅱ分别与左侧第二固定带、右侧第二固定带的连接点为对应的固定带后部。
6.进一步的,根据人体动力学分析,所述左侧提升拉线ⅰ、右侧提升拉线ⅰ与大腿的夹角大于15度,所述左侧提升拉线ⅱ、右侧提升拉线ⅱ与小腿的夹角大于18度。在该情况下,可实现系统装置结构紧凑,同时达到输出力矩要求。
7.本发明的结构将柔性绳传动技术和柔性穿戴引入到下肢助力领域,结构相对紧
凑,优化助力装置的动力学结构,更符合人体运动力学,对人体步行干扰小,同等功率下,输出力臂大,扭矩强,助力效果好,可以高效节省体力,使人体步行状态更加自然,设备运行效率更高。
附图说明
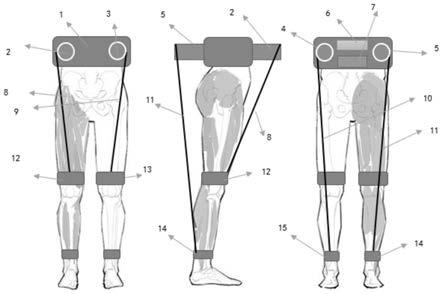
8.图1是本发明一种下肢可穿戴柔性助力装置示意图。
9.其中1是腰带、2是右侧电机ⅰ、3是左侧电机ⅰ、4是左侧电机ⅱ、5是右侧电机ⅱ、6是电源、7是控制器、8右侧拉线ⅰ、9左侧拉线ⅰ、10是左侧拉线ⅱ、11是右侧拉线ⅱ、12是右侧第一固定带、13是左侧第一固定带、14是右侧第二固定带、15是左侧第二固定带。
具体实施方式
10.以下结合附图对本发明具体实施方法作进一步描述:如图1所示,本发明提供了一种下肢可穿戴柔性助力装置,其特征在于,包括了腰带,左侧电机ⅰ,左侧电机ⅱ,右侧电机ⅰ,右侧电机ⅱ,电池,控制器,左侧提升拉线ⅰ,左侧提升拉线ⅱ,右侧提升拉线ⅰ,右侧提升拉线ⅱ,左侧第一固定带、左侧第二固定带,右侧第一固定带、右侧第二固定带共15个模块,通过电机控制提升拉线的拉伸运动实现下肢的抬腿,收腿运动,从而辅助下肢运动,整体结构符合人体动力学,对人体步行干扰小,可以高效节省体力,助力效果好,优化助力装置的动力分配。通过电机控制对应与之连接的提升拉线的拉伸运动实现下肢的抬腿,收腿运动,从而辅助下肢步进运动;所述结构腰带上搭载了一块锂电池,锂电池体积小,重量轻,使得整体重量小,结构紧凑,是整个机构能量的来源。所述腰带上搭载了四个电机,是整个机构的动力源,具有很重要的作用。所述各电机与固定带通过拉线连接,拉线作为传动机构,将电机的动力传输至固定带,从而带动下肢相应关节运动。所述腰带上搭载了控制器,与电池电机紧密连接,空间利用率高,减小整体机构体积,减小通信距离,为整体机构通讯稳定提供保障。所述各固定带选用透气性良好的高弹潜水布料,绑带材质柔软,可以很好地贴合大腿,小腿轮廓,材质抗拉强度大,可以承受拉线的拉力而不会发生显著形变。所述四个电机包括左侧电机ⅰ,左侧电机ⅱ,右侧电机ⅰ,右侧电机ⅱ分别分布于腰带左前,左后,右前,右后部位,为整体提供动力源。所述的左侧电机ⅰ,左侧电机ⅱ,右侧电机ⅰ,右侧电机ⅱ分别与左侧提升拉线ⅰ,左侧提升拉线ⅱ,右侧提升拉线ⅰ,右侧提升拉线ⅱ的一端相连接,拉线作为传动机构,传输与之相联的电机的动力。所述的左侧提升拉线ⅰ,左侧提升拉线ⅱ,右侧提升拉线ⅰ,右侧提升拉线ⅱ,其特征在于分别与左侧第一固定带、左侧第二固定带,右侧第一固定带、右侧第二固定带相连接,分别将左侧电机ⅰ,左侧电机ⅱ,右侧电机ⅰ,右侧电机ⅱ的动力传至与之相联的固定带。所述的左侧第一固定带、左侧第二固定带,右侧第一固定带、右侧第二固定带,其特征在于分别安装在下肢左大腿,下肢左小腿,下肢右大腿,下肢右小腿部位,通过以上固定带分别将左侧电机ⅰ,左侧电机ⅱ,右侧电机ⅰ,右侧电机ⅱ的动力传至左腿髋关节,左腿膝关节,右腿髋关节,右腿膝关节处,辅助下肢行进运动。
11.在行走过程中,以左腿为例,自用户开始迈步时为起点,一共会经历以下几个步态:
①
摆动前期:脚尖离地左腿髋关节上抬带动大腿上摆抬起,膝关节弯屈带动小腿后抬,至膝关节抬至最高位置。
②
摆动后期:膝关节从最高点向下运动,髋关节伸展,小腿前伸,直至脚跟落地。
③
支撑期,左脚着地的完整时期。右腿步态周期和左腿相同。电机驱动助力主
要在于摆动期。
12.自左腿摆动前期始(右腿为支撑期),左腿大腿逐渐上摆抬起,控制器生成指令,控制腰带左侧电机ⅰ转动,通过拉线提升拉动大腿上的固定带,带动大腿上摆,使髋关节向上屈。同时,左侧电机ⅱ带动小腿后摆,使膝关节后屈。至摆动后期,左侧电机ⅰ继续带动髋关节上屈,左侧电机ⅱ不再带动小腿后抬,小腿本身的重量可以满足其前身向下着地。当左腿进入支撑期,右腿便进入摆动期,换作右侧电机ⅰ和右侧电机ⅱ工作,助力右腿摆动。全程能量来源由腰带上的锂电池提供。
技术特征:
1.一种下肢可穿戴柔性助力装置,包括腰带、左侧电机ⅰ、左侧电机ⅱ、右侧电机ⅰ、右侧电机ⅱ、电池、控制器、左侧提升拉线ⅰ、左侧提升拉线ⅱ、右侧提升拉线ⅰ、右侧提升拉线ⅱ、左侧第一固定带、左侧第二固定带、右侧第一固定带、右侧第二固定带,所述腰带穿戴于人体的腰部,所述左侧电机ⅰ、左侧电机ⅱ、右侧电机ⅰ、右侧电机ⅱ分别设置于腰带的左前,左后,右前,右后四个部位;电池、控制器设置于腰带的前部,电池为控制器和各电机供电,控制器控制各电机的转动;所述左侧电机ⅰ、左侧电机ⅱ、右侧电机ⅰ、右侧电机ⅱ的输出端对应连接左侧提升拉线ⅰ、左侧提升拉线ⅱ、右侧提升拉线ⅰ、右侧提升拉线ⅱ的一端,可实现拉线的伸缩;所述左侧提升拉线ⅰ、左侧提升拉线ⅱ、右侧提升拉线ⅰ、右侧提升拉线ⅱ的另一端对应连接左侧第一固定带、左侧第二固定带、右侧第一固定带、右侧第二固定带;所述左侧第一固定带、左侧第二固定带、右侧第一固定带、右侧第二固定带分别穿戴于左侧大腿、左侧小腿、右侧大腿、右侧小腿;所述左侧提升拉线ⅰ、右侧提升拉线ⅰ分别与左侧第一固定带、右侧第一固定带的连接点为对应的固定带前部,所述左侧提升拉线ⅱ、右侧提升拉线ⅱ分别与左侧第二固定带、右侧第二固定带的连接点为对应的固定带后部。2.如权利要求1所述的一种下肢可穿戴柔性助力装置,其特征在于所述左侧提升拉线ⅰ、右侧提升拉线ⅰ与大腿的夹角大于15度,所述左侧提升拉线ⅱ、右侧提升拉线ⅱ与小腿的夹角大于18度。
技术总结
本发明公开了一种下肢可穿戴柔性助力装置,属于穿戴设备领域。该转置包括了腰带,左侧电机Ⅰ,左侧电机Ⅱ,右侧电机Ⅰ,右侧电机Ⅱ,电池,控制器,左侧提升拉线Ⅰ,左侧提升拉线Ⅱ,右侧提升拉线Ⅰ,右侧提升拉线Ⅱ,左侧第一固定带、左侧第二固定带,右侧第一固定带、右侧第二固定带。当对应电机工作时,对应提升拉线做拉伸运动,驱动人体对应关节运动,达到助力效果。本发明结构相对紧凑,优化助力装置的动力学结构,更符合人体运动力学,对人体步行干扰小,输出力臂大,扭矩强,助力效果好,可以高效节省体力,使人体步行状态更加自然,设备运行效率更高。高。高。
技术研发人员:戴跃洪 安冲杰 王永生 李照阳 黄俊彬 司峡溪 曾超
受保护的技术使用者:电子科技大学
技术研发日:2021.11.18
技术公布日:2022/2/15