1.本实用新型涉及导轨技术领域,具体为一种用于燃气管网的巡逻机器人导轨结构。
背景技术:
2.燃气管网中充满易燃易爆的燃气,一旦发生泄漏后果不堪设想,因此需要格外注意。通过导轨引导巡逻机器人能够及时发现燃气管网中出现的问题,避免事故。但现在的巡逻机器人运行时可能产生电火花,在管道泄漏处电火花可能点燃燃气,造成事故。同时现在常用的弯曲导轨具有弧度,拐弯时可能导致巡逻机器人倾覆,影响巡逻工作。因此,开发一种用于燃气管网的巡逻机器人导轨结构。
技术实现要素:
3.本实用新型的目的在于提供一种用于燃气管网的巡逻机器人导轨结构,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种用于燃气管网的巡逻机器人导轨结构,包括一号导轨机构,所述一号导轨机构内包括乘物平台,所述乘物平台顶端活动连接有机器人保护罩,所述机器人保护罩中包括保护壳体,所述保护壳体顶端活动连接有可转动环形视窗;
5.所述乘物平台顶端固定连接有一号激光传感器,且所述一号激光传感器贯穿乘物平台。
6.优选的,所述一号导轨机构一端活动连接有转向平台,所述转向平台内部包括二号导轨机构,所述二号导轨机构顶端活动连接有异向活动平台,所述异向活动平台顶端固定连接有延长导轨,所述异向活动平台顶端固定连接有二号激光传感器。
7.优选的,所述一号导轨机构内包括轨道,所述轨道顶端固定连接有滚动平台,所述滚动平台两侧活动连接有滚轮,所述滚轮一侧活动连接有滚轮轴片,所述滚轮轴片一端固定连接有乘物平台,所述乘物平台顶端活动连接有减速电机。
8.优选的,所述滚动平台内部一侧固定连接有驱动卡齿,所述驱动卡齿一侧活动连接有驱动齿轮,且所述驱动齿轮一端与减速电机输出端活动连接。
9.优选的,所述一号导轨机构和二号导轨机构底端均固定连接有若干固定底脚。
10.与现有技术相比,本实用新型的有益效果是:
11.(1)、该用于燃气管网的巡逻机器人导轨结构,通过机器人保护罩的设置,将巡逻机器人及减速电机和外界的燃气环境进行一定的隔离,一定程度上减少了因电火花的产生引发安全事故的可能。
12.(2)、该用于燃气管网的巡逻机器人导轨结构,通过转向平台的设置,让机器人能够不改变自身的角度和位置,平稳转向,通过一号激光传感器和二号激光传感器的配合,使得导轨结构能够自动判断所处位置,进行转向操作,一定程度上减少了机器人倾覆的风险。
附图说明
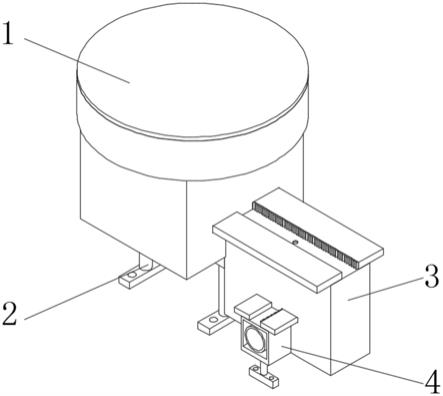
13.图1为本实用新型的等轴侧图;
14.图2为本实用新型的部分结构示意图;
15.图3为本实用新型的另一部分结构示意图;
16.图4为本使用新型的局部放大图。
17.图中:1、机器人保护罩;101、可转动环形视窗;102、保护壳体;2、固定底脚;3、转向平台;301、延长导轨;302、二号激光传感器;303、异向活动平台;4、一号导轨机构;401、乘物平台;402、滚轮轴片;403、轨道;404、驱动齿轮;405、驱动卡齿;406、滚动平台;407、滚轮;408、减速电机;409、一号激光传感器;5、二号导轨机构。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件所必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
20.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不按照实际的比例关系绘制,例如某些层的厚度或宽度可以相对于其他层有所夸大。
21.应注意的是,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图的说明中将不需要再对其进行进一步的具体讨论和描述。
22.如图1-4所示,本实用新型提供一种技术方案:一种用于燃气管网的巡逻机器人导轨结构,包括一号导轨机构4,一号导轨机构4和二号导轨机构5底端均固定连接有若干固定底脚2。一号导轨机构4内包括轨道403,本实施例中,轨道403采用铝合金制成,因为导轨结构要放置在燃气管网内部,连接固定点有限,且轨道403要支撑整个结构,所以要求轨道403具有较高的强度,并要尽量减轻自重,采用硬质铝合金能够满足对应轨道403的要求。轨道403顶端固定连接有滚动平台406,滚动平台406两侧活动连接有滚轮407,滚轮407一侧活动连接有滚轮轴片402,通过滚轮轴片402将滚轮407和滚动平台406夹住,使得滚轮407只能前后运动,增强平稳性。滚轮轴片402一端固定连接有乘物平台401,乘物平台401顶端活动连接有减速电机408。滚动平台406内侧固定连接有驱动卡齿405,驱动卡齿405一侧活动连接有驱动齿轮404,本实施例中,滚动平台406内部只有一侧设置有驱动卡齿405,另一侧依然为平面。驱动齿轮404也仅和有驱动卡齿405的一侧接触。驱动齿轮404一端与减速电机408输出端活动连接,通过减速电机408支撑,使驱动齿轮404相对轨道403悬空,当减速电机408启动时,带动驱动齿轮404和驱动卡齿405发生挤压,产生水平力,推动乘物平台401前进后退。
23.乘物平台401顶端应放置有巡逻机器人,同时乘物平台401上活动连接有机器人保护罩1,降巡逻机器人和外界隔离,机器人保护罩1中包括保护壳体102,保护壳体102顶端活动连接有可转动环形视窗101,可转动环形视窗101可以和巡逻机器人监控系统相连接,侧面透明,若巡逻机器人的监控系统带有螺旋杆,则可转动环形视窗101可以跟随巡逻机器人监控系统的转动而转动,使得整个乘物平台401都被机器人保护罩1包裹,防止减速电机408运行时产生火花,引发事故。一号导轨机构4一端活动连接有转向平台3,转向平台3内部包括二号导轨机构5,二号导轨机构5高度要低于一号导轨机构4,且方形不同,用于时巡逻机器人平稳转向。二号导轨机构5顶端活动连接有异向活动平台303,异向活动平台303顶端固定连接有延长导轨301。本实施例中延长导轨301和一号导轨机构4中的滚动平台406平齐,且设有可以吻合的驱动卡齿405。使得一号导轨机构4中驱动齿轮404能够流畅的滚入延长导轨301,连带乘物平台401也移动上延长导轨301.乘物平台401顶端固定连接有一号激光传感器409,且一号激光传感器409贯穿乘物平台401,激光发射方向向下。异向活动平台303顶端固定连接有二号激光传感器302,激光发射方向向上。激光传感器包括激光器、激光检测器和测量电路,通过激光器发射激光,在遇到障碍后再反射回来,并通过激光检测器检测反射激光的光强,转化为电信号输出。本实施例中,应当设置控制系统,并和一号激光器传感器103、二号激光传感器302、减速电机408电性连接。当乘物平台401在轨道403上运行时,一号激光器103向下发射激光,并打在轨道403上,反射光强稳定,传感器输出信号稳定,当乘物平台401运动到延长导轨301上后,当一号激光传感器409和二号激光传感器302相对时,两传感器皆感到光强增强,输出信号发生变化,传输至控制系统,控制系统控制一号导轨机构4中的减速电机408停转,使其停止在异向活动平台303上,同时使二号导轨机构5中的减速电机408启动,带动异向活动平台303前进,从而做到使得巡逻机器人转向的目的。二号导轨机构5中轨道403另一端也应当设置顺延导轨,异向活动平台303运行到顺延导轨时,因下方轨道403消失,使得乘物平台401上一号激光传感器409感应到的反射光强减弱,从而驱动二号导轨机构5中的电机停止,并控制二号激光传感器302减弱光强,从而使一号导轨机构4中的减速电机408启动,使得乘物平台401的前进方向再度改变。
24.在使用此实用新型时,先通过固定底脚2将导轨结构固定在燃气管道内侧,再将巡逻机器人放置在机器人保护罩1中,打开一号激光传感器409和二号激光传感器302,设定好控制系统,便可驱动巡逻机器人按导轨前进,在燃气管道内巡逻。
25.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。