1.本发明涉及一种机器人执行器,尤其是一种模块化机器人关节。
背景技术:
2.模块化机器人关节是一种将减速器、电机、控制器、电机驱动器以及传感器等都集成到一起的模组,用于驱动或者直接作为机器人的关节结构,实现机器人设计、安装以及维护的方便。
3.公告号为cn112372664b,名称为《一种高集成模块化协作机器人关节模组》的中国发明专利,以及公告号为cn111687879b,名称为《一种协作机器人模块化关节》的中国发明专利,均公开了采用谐波减速器的模块化机器人关节,然而谐波减速器表现出较低的回转刚度,降低了关节的控制性能和机器人整体的精度和性能。且谐波减速器本身承载能力和抗冲击能力较差,降低了关节的承载能力与寿命,降低了机器人的负载。同时谐波减速器效率相对较低,特别是在低温环境下效率很差,进一步降低了关节输出性能。
4.此外,现有技术中,还会采用多级行星减速器或者采用多级齿轮减速器的模块化关节,其大多很难设计中空走线,同时,由于在模块化关节中集成力传感器通常会大幅降低关节刚度,并使得结构非常复杂,很多模块化关节中不集成力传感器,也很少采用双编码器设计,这使得关节的力控精度和效果较差。
技术实现要素:
5.为解决背景技术中存在的问题,本发明提供一种模块化机器人关节。
6.实现上述目的,本发明采取下述技术方案:一种模块化机器人关节,包括电机磁编码器的磁环、集成控制板、无框力矩电机、输出磁环端盖、输出磁编码电路板、输出磁编码器磁环以及减速器;所述无框力矩电机的电机端盖上设有集成控制板,无框力矩电机的电机轴上设有电机磁编码器的磁环,并电机轴与减速器连接,所述减速器上设有输出磁环端盖以及输出磁编码电路板,所述输出磁环端盖上设有输出磁编码器磁环,所述输出磁编码电路板与集成控制板数据传输连接;所述集成控制板上集成了关节控制与驱动电路、imu传感器、温度传感器电路、力传感器采集电路、外部通讯电路以及电机磁编码器磁环的芯片、连接电源线和电机线。
7.与现有技术相比,本发明的有益效果是:
8.1、本发明在固定法兰上直接集成力传感器,设置了减速器,具有中心孔走线结构,并将无框力矩电机与驱动器、控制器、传感器等电路集成一体,结构紧凑。
9.2、本发明具有大的减速比设计范围的同时,仍然可以保留中心孔结构,方便了集成安装与走线。
10.3、相比于传统使用谐波减速器的方案,本发明的减速器实现了大减速比、高传动刚度、大承载能力、高效率、高精度、小尺寸与轻量化等优势,并具备力感知能力,方便集成到机器人当中。
11.4、本发明具有双编码器结构可以实现高精度位置控制,具有力传感器可以实现力控与柔顺控制功能和电机端控制。
12.5、本发明提出的集成到固定法兰的力传感器结构,更加简单方便,尺寸更小,所采用的立式结构具有更好的刚度。
附图说明
13.图1是本发明实施例1的整体结构示意图;
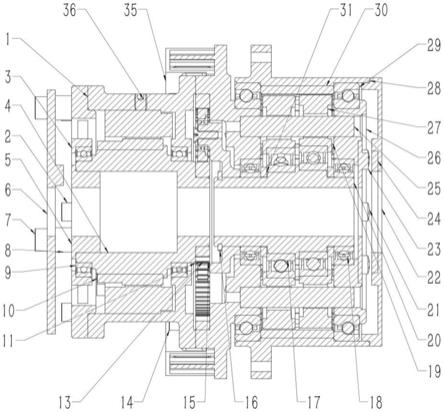
14.图2是图1的剖视图;
15.图3是应变片位置示意图;
16.图4是图1的爆炸图;
17.图5是减速器的原理图;
18.图6是本发明实施例2的整体结构示意图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.实施例1:
21.一种模块化机器人关节,包括电机磁编码器的磁环5、集成控制板6、无框力矩电机10、输出磁环端盖22、输出磁编码电路板23、输出磁编码器磁环24以及减速器;所述无框力矩电机10的转子固定在电机轴4上,无框力矩电机10的定子通过紧定螺钉36固定在电机壳1上,通过两个电机轴承9,将电机轴4支撑在电机端盖3和电机壳1之间,并使用电机端盖螺钉2固定。无框力矩电机也可以采用外转子结构,或者轴向磁通电机,来获得的更大的电机扭矩密度;无框力矩电机10的电机端盖3上设有通过控制板支撑零件8以及控制板螺钉7集成控制板6,无框力矩电机10的电机轴4上设有电机磁编码器的磁环5,所述电机磁编码器的磁环5用于检测无框力矩电机10的转子的位置;并电机轴4与减速器连接,所述减速器上设有输出磁环端盖22以及输出磁编码电路板23,所述输出磁环端盖22上设有输出磁编码器磁环24,所述输出磁编码电路板23与集成控制板6数据传输连接;通过输出磁编码电路板23的磁编码器芯片对输出磁编码器磁环24的检测,可以得到滚针壳28的旋转角度,并将该角度数据通过线缆,穿过中空结构传递到集成控制板6上;所述集成控制板6上集成了关节控制与驱动电路、imu传感器、温度传感器电路、力传感器采集电路、外部通讯电路以及电机磁编码器磁环5的芯片、连接电源线和电机线。
22.所述减速器包括曲轴20、输出销25、输出轴承端盖26、摆线齿轮27、滚针壳28、输出角接触轴承29、滚针30、固定法兰35以及行星轮系,所述无框力矩电机10的电机轴4与行星轮系的太阳齿轮13同轴固定连接,所述行星轮系的内齿圈11固定在固定法兰35上,所述固定法兰35上集成有力传感器,并固定法兰35通过电机壳固定螺钉14与无框力矩电机10的电机壳1连接;行星轮系的行星架15与曲轴20的输入端键连接,并用弹性挡圈16限位,所述曲轴20的外侧通过摆线轮轴承17转动套装有两个摆线齿轮27,并曲轴20的输入端通过一个曲
轴轴承18与固定法兰35转动连接,且曲轴20的输出端通过另一个曲轴轴承18与输出轴承端盖26转动连接,两个所述摆线齿轮27的每两个对应的周向圆之间均设有输出销25,每个所述输出销25的一端均与固定法兰35连接,并每个输出销25的另一端均与输出轴承端盖26连接,且两个摆线齿轮27的外侧套装有滚针壳28,所述滚针壳28与两个摆线齿轮27之间设有滚针30,并滚针壳28的两端分别通过输出角接触轴承29与固定法兰35以及输出轴承端盖26对应转动连接,滚针壳28即为关节的输出,滚针壳28套装在输出轴承端盖26的外侧,并滚针壳28上设有输出磁环端盖22,所述输出轴承端盖26通过端盖连接螺钉19与固定法兰35连接,并输出轴承端盖26上通过电路板固定螺钉21设有输出磁编码电路板23。
23.所述力传感器包括四组应变测量面,每组所述应变测量面均包括两个v型应变片35a,每个所述v型应变片35a均包括两个对称设置的45
°
方向的应变片,两个v型应变片35a组成一个全桥电流,一组应变测量面具有两个全桥电路,该设计具有很好的抗串扰性能,具有高刚度特性,还可以设计成轮辐式结构,或者其他弹性体结构,应变片测量方案也可以改为电容式、光电式、编码器测量等设计;每个所述应变片均与集成控制板6连接,用于力矩测量。图3所示,在固定法兰35的周向四个测量位置各贴一个v型应变片。
24.所述曲轴20外套装有挡圈31,所述挡圈31设置在输出角接触轴承29的内侧,通过调节挡圈31的轴向尺寸来调节装配输出角接触轴承29的游隙。
25.实施例2:
26.本实施例与实施例1的区别在于:
27.所述减速器包括曲轴20、输出销25、输出轴承端盖26、摆线齿轮27、滚针壳28、输出角接触轴承29、滚针30、固定法兰35以及行星轮系,所述无框力矩电机10的电机轴4与行星轮系的太阳齿轮13同轴固定连接,所述行星轮系的内齿圈11固定在固定法兰35上,所述固定法兰35通过电机壳固定螺钉14与无框力矩电机10的电机壳1连接;行星轮系的行星架15与曲轴20的输入端键连接,并用弹性挡圈16限位,所述曲轴20的外侧通过摆线轮轴承17转动套装有两个摆线齿轮27,并曲轴20的输入端通过一个曲轴轴承18与固定法兰35转动连接,且曲轴20的输出端通过另一个曲轴轴承18与输出轴承端盖26转动连接,两个所述摆线齿轮27的每两个对应的周向圆之间均设有输出销25,每个所述输出销25的一端均与固定法兰35连接,并每个输出销25的另一端均与输出轴承端盖26连接,且两个摆线齿轮27的外侧套装有滚针壳28,所述滚针壳28与两个摆线齿轮27之间设有滚针30,滚针壳28上集成有力传感器,并滚针壳28的一端与固定法兰35连接,滚针壳28的另一端通过输出角接触轴承29与输出轴承端盖26转动连接,所述输出轴承端盖26即为关节的输出,上设有输出磁环端盖22以及通过电路板固定螺钉21设有输出磁编码电路板23。
28.驱动器、控制器、传感器等电路也可以设计为多块电路板,或者全部集成到一块板,这可能需要输出磁编码器的安装进行调整。
29.减速器由高速级减速单元与低速级减速单元两部分组成,行星轮系为高速级减速单元,曲轴20、摆线齿轮27、滚针壳28、输出销25、滚针30、固定法兰35以及输出轴承端盖26等为低速级减速单元。可以高速级减速单元采用渐开线齿轮设计,低速级减速单元采用摆线针轮设计,保证大减速比、高传动刚度、大承载能力、高效率、高精度、小尺寸与轻量化,还能保留中心孔结构。也可以在低速级减速单元采用渐开线齿轮、摆线齿轮、圆弧齿轮,高速级减速单元也可以采用其他齿形。通过优化齿形结构可以调整减速器的特性。
30.本发明的工作过程如下:
31.无框力矩电机10的旋转运动通过行星轮系的太阳齿轮13传递到行星轮系的行星架15,然后行星架15带动曲轴20运动,而后通过摆线齿轮27输出为滚针壳28的旋转运动。
32.本发明通过固定法兰35进行固定,并通过滚针壳28与外界连接,输出旋转运动。
33.如图5所示,无框力矩电机10输出到s1齿轮(太阳齿轮13),传递到h1(行星架15),固定v1部分(固定法兰35和输出轴承端盖26),通过r2齿轮(滚针壳28)输出。
34.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同条件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
35.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。