1.本发明涉及车辆检修设备技术领域,特别涉及一种车厢切割系统及车厢切割方法。
背景技术:
2.敞车及其他类型的车辆的车厢检修的过程中,不可避免的会存在需要切割车厢的操作。
3.目前,切割车厢的操作采用人工火焰切割。由于车厢的体积较大,人工火焰切割的工作环境恶劣,操作人员存在安全隐患;工作强度大,工作效率低下。
4.因此,如何提高安全性及效率,是本技术领域人员亟待解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种车厢切割系统,以提高安全性及效率。本发明还提供了一种应用上述车厢切割系统的车厢切割方法。
6.为实现上述目的,本发明提供如下技术方案:
7.一种车厢切割系统,包括:
8.导轨系统,所述导轨系统具有两个对阵设置的导轨组,两个所述导轨组之间具有供车厢移动的通道;
9.机器人系统,所述机器人系统包括与所述导轨组滑动配合的机器人底座及设置于所述机器人底座上的机器人,所述机器人的驱动端至少能够上下移动;
10.机器人末端,所述机器人末端设置于所述机器人的驱动端,所述机器人末端包括视觉识别组件及切割组件,所述视觉识别组件用于识别所述车厢的待切割位置,所述切割组件用于对所述车厢的待切割位置进行切割。
11.可选地,上述车厢切割系统中,
12.所述导轨组包括:导轨底座、沿所述导轨底座的延伸方向设置的导轨及沿所述导轨底座的延伸方向设置的齿条;
13.所述机器人系统还包括设置于所述机器人底座下方的滑块、设置于所述机器人底座上的驱动装置及与所述驱动装置的驱动端连接的齿轮;
14.所述导轨与所述滑块滑动配合,所述齿轮与所述齿条啮合。
15.可选地,上述车厢切割系统中,所述导轨组还包括:
16.设置于所述导轨底座端部的机械限位部件,所述机械限位部件具有用于与所述机器人底座限位接触的接触面;
17.和/或,与所述导轨底座固定连接的限位开关,所述限位开关与所述驱动装置通信连接,所述限位开关具有用于与所述机器人底座接触的开关按压部。
18.可选地,上述车厢切割系统中,所述驱动装置包括电机及与所述电机的输出轴连接的变速器,所述驱动装置的驱动端为所述变速器的输出轴。
19.可选地,上述车厢切割系统中,所述导轨组还包括拖链,所述拖链的两端分别与所述导轨底座及所述机器人底座固定连接;
20.所述拖链的内部腔体供与所述机器人连接的管线穿过。
21.可选地,上述车厢切割系统中,所述机器人为六轴机器人。
22.可选地,上述车厢切割系统中,所述导轨组的外侧面具有安全护栏。
23.可选地,上述车厢切割系统中,所述导轨系统的两个所述导轨组上均具有至少一个所述机器人系统。
24.可选地,上述车厢切割系统中,所述视觉组件为能够获取图像信息的相机。
25.本发明还提供了一种车厢切割方法,应用如上述任一项所述的车厢切割系统,包括:
26.机器人系统沿导轨系统的导轨组滑动至多个工作位,分别在机器人系统到达每个工作位后通过视觉识别组件对位于通道内的车厢进行识别;
27.将所述视觉识别组件获取的信息转换为机器人坐标,传递给机器人;
28.所述机器人根据机器人坐标生成的切割路径带动切割组件用于对所述车厢的待切割位置进行切割。
29.从上述的技术方案可以看出,本发明提供的车厢切割系统,机器人系统沿着导轨组的延伸方向移动,通过视觉识别组件用于识别车厢的待切割位置,通过机器人的运行带动位于其驱动端的切割组件对车厢的待切割位置进行切割,机器人获取坐标后自动生成切割路径,机器人控制切割系统实现敞车车厢智能识别切割功能。通过上述设置,避免人工切割操作,有效降低了操作人员存在安全隐患,提高了安全性;并且,降低了人工工作强度,提高了工作效率。
30.本发明提供的车厢切割方法,应用如上述任一种车厢切割系统,上述车厢切割系统具有上述技术效果,因此,具有上述车厢切割系统的车厢切割方法也应具有同样地技术效果。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
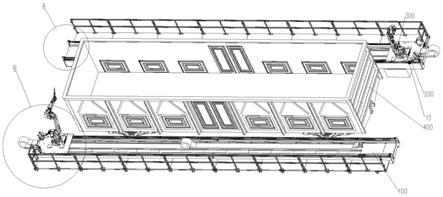
32.图1为本发明实施例提供的车厢切割系统的立体结构示意图;
33.图2为图1中a部分的局部放大图;
34.图3为图1中b部分的局部放大图;
35.图4为本发明实施例提供的车厢切割系统的侧视结构示意图。
具体实施方式
36.本发明公开了一种车厢切割系统,以提高安全性及效率。本发明还提供了一种应用上述车厢切割系统的车厢切割方法。
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.如图1-图4所示,本发明实施例提供了一种车厢切割系统,包括导轨系统100、机器人系统200及机器人末端300。导轨系统100具有两个对阵设置的导轨组,两个导轨组之间具有供车厢400移动的通道;机器人系统200包括与导轨组滑动配合的机器人底座6及设置于机器人底座6上的机器人4,机器人4的驱动端至少能够上下移动;机器人末端300设置于机器人4的驱动端,机器人末端300包括视觉识别组件及切割组件5,视觉识别组件用于识别车厢400的待切割位置,切割组件5用于对车厢400的待切割位置进行切割。
39.本发明实施例提供的车厢切割系统,机器人系统200沿着导轨组的延伸方向移动,通过视觉识别组件用于识别车厢400的待切割位置,通过机器人4的运行带动位于其驱动端的切割组件5对车厢400的待切割位置进行切割,机器人获取坐标后自动生成切割路径,机器人控制切割系统实现敞车车厢智能识别切割功能。通过上述设置,避免人工切割操作,有效降低了操作人员存在安全隐患,提高了安全性;并且,降低了人工工作强度,提高了工作效率。
40.其中,车厢400的待切割位置依据车厢400的受损部位及整体结构布局等因素决定,可以通过视觉识别组件识别车厢400的外部结构得出车厢400的待切割位置。
41.优选地,为了提高自动化程度,导轨组包括:导轨底座11、沿导轨底座11的延伸方向设置的导轨9及沿导轨底座11的延伸方向设置的齿条10;机器人系统200还包括设置于机器人底座6下方的滑块7、设置于机器人底座6上的驱动装置3及与驱动装置3的驱动端连接的齿轮;导轨9与滑块7滑动配合,齿轮与齿条10啮合。当然,也可以手动推动机器人系统200,在此不做具体限制且均在保护范围之内。
42.进一步地,导轨组还包括:设置于导轨底座11端部的机械限位部件8,机械限位部件8具有用于与机器人底座6限位接触的接触面;与导轨底座11固定连接的限位开关13,限位开关13与驱动装置3通信连接,限位开关13具有用于与机器人底座6接触的开关按压部。可以理解的是,在限位开关13的开关按压部与机器人底座6接触后,限位开关13向驱动装置3发出停止信号。通过设置机械限位部件8及限位开关13,有效提高了运行稳定性。
43.更进一步地,驱动装置3包括电机及与电机的输出轴连接的变速器,驱动装置3的驱动端为变速器的输出轴。通过上述设置,有效提高了对于机器人系统200移动的速度控制。
44.更进一步地,导轨组还包括拖链12,拖链12的两端分别与导轨底座11及机器人底座6固定连接;拖链12的内部腔体供与机器人4连接的管线穿过。通过增加拖链12,避免了与机器人4连接的管线与导轨组或其他部件发生摩擦,进而有效提高了使用寿命。
45.为了方便控制,机器人4为六轴机器人。当然,也可以设置为其他类型的机器人,在此不再一一累述且均在保护范围之内。
46.优选地,导轨组的外侧面具有安全护栏1。导轨组的外侧面为两个导轨组相对远离的一侧面。其中,安全护栏1内侧可以提供人体行走的过道,也可以仅用来对机器人4进行防护。
47.并且,导轨底座11的底部设置有导轨立柱2,以便于太高导轨底座11的水平高度。
48.导轨系统100的两个导轨组上均具有至少一个机器人系统200。本实施例中,导轨系统100的两个导轨组上均具有一个机器人系统200。当然,也可以在两个导轨组上设置多个机器人系统200;或者,仅在一个导轨组上设置一个或多个机器人系统200
49.优选地,视觉组件为能够获取图像信息的相机。也可以采用摄像机或其他图像获取设备,在此不再一一累述且均在保护范围之内。
50.本发明实施例还提供了一种车厢切割方法,应用如上述任一种车厢切割系统,包括步骤:
51.s:机器人系统200沿导轨系统100的导轨组滑动至多个工作位,分别在机器人系统200到达每个工作位后通过视觉识别组件对位于通道内的车厢400进行识别;
52.s2:将视觉识别组件获取的信息转换为机器人坐标,传递给机器人4;
53.s3:机器人4根据机器人坐标生成的切割路径带动切割组件5用于对车厢400的待切割位置进行切割。
54.本发明实施例提供的车厢切割方法,应用如上述任一种车厢切割系统,上述车厢切割系统具有上述技术效果,因此,具有上述车厢切割系统的车厢切割方法也应具有同样地技术效果。
55.车厢切割系统包括导轨系统100、机器人系统200及机器人末端300。以多个工作位的数量为三个,分别是a、b、c三个工作位,具体操作过程如下:
56.以通道的延伸方向(车厢400移动方向)为y方向,车厢400的宽度方向为x方向,垂直方向为z方向。
57.在导轨组(导轨9)上设置a、b、c三个工作位,工作时机器人系统200带动机器人末端300的视觉识别组件在导轨组的a、b、c三个工作位分别对车厢400进行拍照识别获取图像坐标并转换为机器人坐标,将机器人坐标传递给机器人4,机器人4根据坐标自动生成切割路径。
58.车厢400就位固定后,通过控制机器人4的电机及变速器(驱动装置3)驱动机器人4沿着导轨9运动到工作位a(如机器人4距离导轨9左端面2.5m处),机器人4接收到到位信号后,机器人4运动到识别姿态通过拍照识别获取图像坐标,并将图像坐标转换成机器人坐标,机器人4的程序自动生成切割路径,并对车厢400的a区域车厢进行切割;a区域车厢切割后,机器人4的电机及变速器(驱动装置3)驱动机器人4沿着导轨9运动到工作位b(如机器人4距离导轨9左端面5m处),机器人4接收到到位信号后,机器人4运动到识别姿态通过拍照识别获取图像坐标,并将图像坐标转换成机器人坐标,机器人4的程序自动生成切割路径,并对车厢400的b区域车厢进行切割;b区域车厢切割后,机器人4的电机及变速器(驱动装置3)驱动机器人4沿着导轨9运动到工作位c(如机器人4距离导轨9左端面7.5m处),机器人4接收到到位信号后,机器人4运动到识别姿态通过拍照识别获取图像坐标,并将图像坐标转换成机器人坐标,机器人4的程序自动生成切割路径,并对车厢400的车厢c区域车厢进行切割,切割结束后机器人复位导轨复位,货车识别切割工作结束。
59.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
60.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的
一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。