1.本发明涉及人机交互技术领域,特别涉及一种双桥运动会指导方法、存储介质及系统。
背景技术:
2.对人体姿态行为的检测以及动作识别近年来在医疗领域的应用变得越来越广泛,具体涉及在疾病诊断、残障人士的康复训练评估以及老年人日常监测等方面。目前在医疗康复领域中,主要是通过穿戴式传感器采集并处理患者康复训练中肢体的三维运动数据进行姿态估计和动作识别。这种方法具有时效性好、识别准确度高等优点,但由于仪器自身的重量以及穿戴方式会大大降低患者的舒适度。并且针对双桥运动而言,目前并没有辅助康复训练系统出现,主要是通过康复医生对患者进行指导训练。这种现状无疑给患者带来巨大的经济负担,同时也增加了医生的工作量。
技术实现要素:
3.发明目的:本发明的目的是提出一种双桥运动指导方法,通过体感传感器捕捉用户的骨骼数据,从而实现对用户的双桥运动的动作指导,指导用户康复训练,节约医生人力,降低用户经济负担。
4.本发明的另一目的是提出一种存储有上述方法实例化的计算机程序的存储介质以及可以实施上述方法的双桥运动指导系统。
5.技术方案:本发明所述的双桥运动指导方法,包括如下步骤:
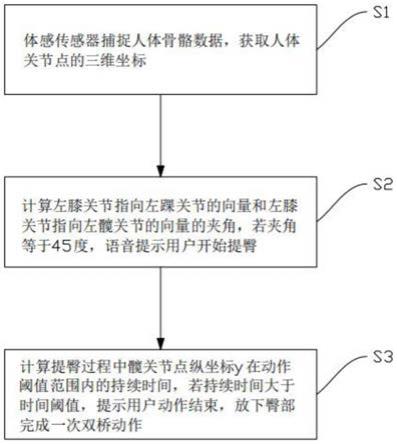
6.s1:体感传感器捕捉人体骨骼数据,获取人体关节点的三维坐标;
7.s2:计算一侧膝关节指向踝关节的向量和膝关节指向髋关节的向量的夹角,若夹角等于45度,语音提示用户开始提臀;
8.s3:计算提臀过程中髋关节点纵坐标y在动作阈值范围内的持续时间,若持续时间大于时间阈值,提示用户动作结束,放下臀部完成一次双桥动作。
9.进一步的,所述s3步骤中的动作阈值范围由以下方法计算出:
10.s3.1:计算在仰卧位时髋关节点的坐标为(h
x
,hy,hz),颈关节点的坐标为(n
x
,ny,nz),膝关节的坐标为(k
x
,ky,kz),设髋关节点的理想坐标为(h
x
,ideal_y,hz);
11.s3.2:计算仰卧位时颈关节点和膝关节点确定的直线方程:
[0012][0013]
s3.3:将髋关节点的理想坐标的横坐标和纵坐标带入直线方程中,求得髋关节点的理想坐标的纵坐标ideal_y为:
[0014][0015]
s3.4:计算动作阈值范围的上限ideal_y_max和下限ideal_y_min为:
[0016]
ideal_y_max=idealy*(1+e)
[0017]
ideal_y_min=idealy*(1-e)
[0018]
式中e为误差系数。
[0019]
进一步的,述s1步骤中的体感传感器为kinect传感器。
[0020]
进一步的,所述s3步骤中的持续时间为髋关节点纵坐标y持续在动作范围内的帧数除以体感传感器每秒采集帧数。
[0021]
进一步的,所述s3步骤后还包括:
[0022]
s4:间隔预设的间隔时间后,重复步骤s2至s3,直到达到设定的训练次数。
[0023]
本发明所述的存储介质,存储有计算机程序,所述计算机程序被设置为运行时实现上述双桥运动指导方法。
[0024]
本发明所述的双桥运动指导系统,包括控制器、体感传感器、语音播报模块及上述存储介质,所述体感传感器、所述语音播报模块及所述存储介质均与所述控制器电性连接。
[0025]
进一步的,所述体感传感器为kinect传感器。
[0026]
有益效果:与现有技术相比,本发明具有如下优点:(1)采用体感传感器识别人体的骨骼点从而获取人体的姿态特征,患者无需佩戴穿戴式传感器,避免穿戴式传感器影响患者训练。(2)可以通过人机交互技术实现对患者双桥康复训练的指导,解放医生人力,同时降低患者经济负担,患者可以自行任意时间进行康复训练,为患者提供便利度。
附图说明
[0027]
图1为本发明的实施例的双桥运动指导方法的流程图;
[0028]
图2为kinect传感器获取的人体骨骼节点示意图。
具体实施方式
[0029]
下面结合附图对本发明的技术方案作进一步说明。
[0030]
参照图1,根据本发明实施例的双桥运动指导方法,包括如下步骤:
[0031]
s1:体感传感器捕捉人体骨骼数据,获取人体关节点的三维坐标;体感传感器在捕捉人体的骨骼数据前,需要进行参数的初始化,并且患者需要卧于床上做好双桥运动的起始动作,即仰卧位。
[0032]
s2:计算一侧膝关节指向踝关节的向量和膝关节指向髋关节的向量的夹角,若夹角等于45度,语音提示用户开始提臀;实际中可以容许一定的误差,检测到两个向量之间的夹角近似于45度即可。
[0033]
s3:计算提臀过程中髋关节点纵坐标y在动作阈值范围内的持续时间,若持续时间大于时间阈值,提示用户动作结束,放下臀部完成一次双桥动作。
[0034]
其中步骤s1中的体感传感器,指由摄像头及红外传感器结合形成的可以捕捉人体动作的传感器,如微软的kinect以及华硕的xtion等,可以捕捉人体的骨骼节点数据,如图2所示。根据上述技术方案的双桥运动指导方法,通过体感传感器检测双桥运动中主要的关节节点,如膝关节、踝关节和髋关节,来判断双桥运动过程中的动作是否符合标准,配合语音播报模块播放语音信息指导患者作出符合标准的双桥运动,解放医生的人力,同时降低患者的经济成本。
[0035]
在本实施例中,体感传感器选用微软的kinect2,通过基于c++的visual studio开
发环境读取26个人体关节点的数据。以左侧关节为例,设左膝关节为kneel,左踝关节为anklel,左髋关节为hipl,其坐标分别表示为:
[0036][0037]
用三维向量相减即可得出从膝关节指向踝关节的向量表示为:
[0038]
vector3 leftk2a=(x
k-xa,y
k-ya,z
k-za)
[0039]
从膝关节指向髋关节的向量表示为:
[0040]
vector3 leftk2h=(x
k-xh,y
k-yh,z
k-zh)
[0041]
通过空间向量法可知两向量之间夹角为:
[0042][0043]
当该角度为45度时,表示患者的起始动作符合标准,可以开始抬臀进行双桥运动。
[0044]
根据仰卧位的初始坐标值计算出人体提臀至最高点时髋关节的理想纵坐标值。
[0045]
以计算左髋关节坐标点为例,设左膝关节为kneel,颈关节点为neck,其坐标点分别为:
[0046][0047]
通过空间直线的两点式方法可以计算出颈关节点和膝关节点确定的直线方程为:
[0048][0049]
由于在提臀过程中髋关节的x、z轴始终保持不变,因此只需要计算y轴的值,设髋关节的理想纵坐标值为ideal_y,则ideal_y可以表示为:
[0050][0051]
其中x为仰卧位时的髋关节初始坐标值。
[0052]
对该值设定上下阈值构成动作阈值范围,当髋关节的纵坐标值落入动作阈值范围内保持一定时间时,即认定患者提臀动作符合标准。设允许其出现的误差为e,则动作阈值范围的上下限为:
[0053]
ideal_y_max=idealy*(1+e)
[0054]
ideal_y_min=idealy*(1-e)
[0055]
在本实施例中,误差e取0.15,实际情况中可以根据患者的情况设置误差e的具体值。
[0056]
由于kinect传感器每秒可以采集30帧的图像,所以步骤s3中的持续时间可以通过计算连续的髋关节纵坐标满足动作阈值范围的连续帧数除以30获得,在本实施例中,持续时间超过5秒则认为提臀符合标准,可以语音提示患者缓慢放下臀部。提示用户放下臀部的同时获取当前时间戳,当程序内获取到的时间戳与该时间戳的差值为3秒时,提示用户进行下一次抬臀动作,重复步骤s2至s3。根据该流程循环达到设定的训练次数,即为一次双桥运
动康复训练。
[0057]
根据本发明实施例的存储介质,存储有上述方法实例化的计算机程序,计算机程序被调用运行时可以实现上述双桥运动指导方法。根据本发明实施例的双桥运动指导系统,包括控制器以及与控制器电性连接的体感传感器、语音播报模块及上述存储介质。控制器运行存储介质中的计算机程序,通过体感传感器获取人体的骨骼关节坐标,判断患者动作是否符合双桥运动标准,并通过语音播报模块适时地播放语音指导信息,指导患者完成标准的双桥运动。其中控制器可以选择个人电脑。