1.本实用新型涉及一种四足仿生机器狗,涉及机器人技术领域。
背景技术:
2.机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.专利cn204264314u公开了一种仿生机器狗,包括上平板、下平板、两个侧板、前连接臂、两个第一舵机和两个第二舵机等。其中,腿的控制采用双舵机串联,无法彻底保证机器狗能够适应多地形、步态稳定、结构简单等特点。
技术实现要素:
4.鉴于现有技术的不足,本实用新型所要解决的技术问题是提供一种四足仿生机器狗。
5.为了解决上述技术问题,本实用新型的技术方案是:一种四足仿生机器狗,包括机械狗本体,机械狗本体上设有四条机械狗腿,机械狗腿均包括舵机支架、第一舵机、第二舵机、上支持臂、下支持臂、摇臂、推杆,第一舵机与第二舵机均上下固连在舵机支架上且输出轴均左右延伸,上方的第一舵机输出轴固连上支持臂,上支持臂另一端铰接摇臂,摇臂另一端铰接推杆顶部,推杆底部设有机器狗足,推杆非端部铰接下支持臂,下支持臂另一端固连下方的第二舵机输出轴。
6.优选的,机械狗本体自前往后依次由第一储能仓、核心舱、第二储能仓组成,第一储能仓与核心舱之间左右对称固连有第三舵机,核心舱与第二储能仓之间左右对称固连有第四舵机,两个第三舵机与两个第四舵机的输出轴均前后延伸。
7.优选的,舵机支架分别安装在机械狗本体的左前方、左后方、右前方、右后方,左前方与右前方的舵机支架均与对应第三舵机的输出轴固连,左后方与右后方的舵机支架均与对应第四舵机的输出轴固连。
8.优选的,第一储能仓的前端设有超声探测模块,核心舱内部设有控制模块、核心舱散热板,核心舱散热板位于控制模块上部,核心舱上设有可拆卸的上盖板,第一储能仓与第二储能仓内部均设有电池仓,电池仓中均设有电源模块与电池仓盖板。
9.优选的,机器狗足固定在所述的推杆底端。
10.与现有技术相比,本实用新型具有以下有益效果:结构简单,成本低。腿由舵机支架、第一舵机、第二舵机、上支持臂、下支持臂、摇臂、推杆构成。由第一舵机控制上支持臂和第二舵机控制下支持臂,采用双舵机并排结构以控制腿的运动,步态更为稳定,运动更为流畅,这是一般的双舵机串联结构无法做到的。因此,本实用新型实施例稳定性更好,适应环境更强。
11.下面结合附图和具体实施方式对本实用新型做进一步详细的说明。
附图说明
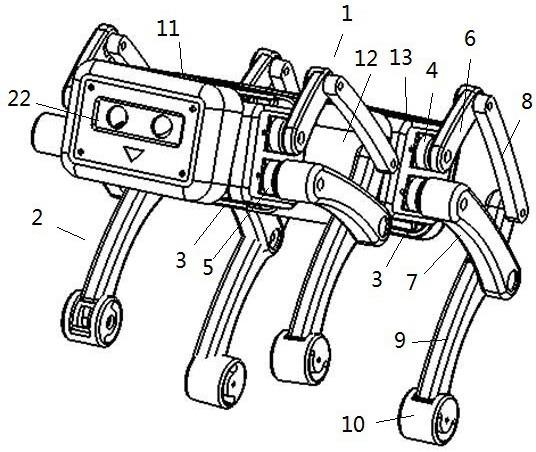
12.图1为本实用新型实施例的构造示意图。
13.图2为本实用新型实施例的爆炸示意图。
14.图3为机械狗腿的构造示意图一。
15.图4为机械狗腿的构造示意图二。
具体实施方式
16.下面结合附图及实施例对本实用新型做进一步说明。
17.应该指出,以下详细说明都是示例性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
18.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
19.如图1~4所示,本实施例提供了一种四足仿生机器狗,包括机械狗本体1,机械狗本体上设有四条机械狗腿2,机械狗腿均包括舵机支架3、第一舵机4、第二舵机5、上支持臂6、下支持臂7、摇臂8、推杆9,第一舵机与第二舵机均上下固连在舵机支架上且输出轴均左右延伸,上方的第一舵机输出轴固连上支持臂,上支持臂另一端铰接摇臂,摇臂另一端铰接推杆顶部,推杆底部设有机器狗足10,推杆非端部铰接下支持臂,下支持臂另一端固连下方的第二舵机输出轴。
20.在本实用新型实施例中,机械狗本体自前往后依次由第一储能仓11、核心舱12、第二储能仓13组成,第一储能仓与核心舱之间左右对称固连有第三舵机14,核心舱与第二储能仓之间左右对称固连有第四舵机15,两个第三舵机与两个第四舵机的输出轴均前后延伸。两个第三舵机与两个第四舵机控制腿的横向运动。
21.在本实用新型实施例中,舵机支架分别安装在机械狗本体的左前方、左后方、右前方、右后方,左前方与右前方的舵机支架均与对应第三舵机的输出轴固连,左后方与右后方的舵机支架均与对应第四舵机的输出轴固连。
22.在本实用新型实施例中,第一储能仓的前端设有超声探测模块22,核心舱内部设有控制模块16、核心舱散热板17,核心舱散热板位于控制模块上部,核心舱上设有可拆卸的上盖板18,第一储能仓与第二储能仓内部均设有电池仓19,电池仓中均设有电源模块20与电池仓盖板21。
23.在本实用新型实施例中,机器狗足固定在所述的推杆底端。
24.在本实用新型实施例中,机器狗的运动、通信、视觉探测均由控制模块进行控制,视觉探测利用图像传感器与光流传感器,均属于现有技术。
25.在本实用新型实施例中,机器狗的架构采用聚乳酸材料制成,价格低廉,质轻易得。
26.该四足仿生机器狗的工作原理为:结构简单,腿由舵机支架、第一舵机、第二舵机、上支持臂、下支持臂、摇臂、推杆构成。由第一舵机控制上支持臂和第二舵机控制下支持臂,
采用双舵机并排结构以控制腿的运动,步态更为稳定,运动更为流畅,这是一般的双舵机串联结构无法做到的。因此,本实用新型实施例稳定性更好,适应环境更强。
27.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
技术特征:
1.一种四足仿生机器狗,其特征在于:包括机械狗本体,机械狗本体上设有四条机械狗腿,机械狗腿均包括舵机支架、第一舵机、第二舵机、上支持臂、下支持臂、摇臂、推杆,第一舵机与第二舵机均上下固连在舵机支架上且输出轴均左右延伸,上方的第一舵机输出轴固连上支持臂,上支持臂另一端铰接摇臂,摇臂另一端铰接推杆顶部,推杆底部设有机器狗足,推杆非端部铰接下支持臂,下支持臂另一端固连下方的第二舵机输出轴。2.根据权利要求1所述的四足仿生机器狗,其特征在于:机械狗本体自前往后依次由第一储能仓、核心舱、第二储能仓组成,第一储能仓与核心舱之间左右对称固连有第三舵机,核心舱与第二储能仓之间左右对称固连有第四舵机,两个第三舵机与两个第四舵机的输出轴均前后延伸。3.根据权利要求2所述的四足仿生机器狗,其特征在于:舵机支架分别安装在机械狗本体的左前方、左后方、右前方、右后方,左前方与右前方的舵机支架均与对应第三舵机的输出轴固连,左后方与右后方的舵机支架均与对应第四舵机的输出轴固连。4.根据权利要求2所述的四足仿生机器狗,其特征在于:第一储能仓的前端设有超声探测模块,核心舱内部设有控制模块、核心舱散热板,核心舱散热板位于控制模块上部,核心舱上设有可拆卸的上盖板,第一储能仓与第二储能仓内部均设有电池仓,电池仓中均设有电源模块与电池仓盖板。5.根据权利要求1所述的四足仿生机器狗,其特征在于:机器狗足固定在所述的推杆底端。
技术总结
本实用新型涉及一种四足仿生机器狗,包括机械狗本体,机械狗本体上设有四条机械狗腿,机械狗腿均包括舵机支架、第一舵机、第二舵机、上支持臂、下支持臂、摇臂、推杆,第一舵机与第二舵机均上下固连在舵机支架上且输出轴均左右延伸,上方的第一舵机输出轴固连上支持臂,上支持臂另一端铰接摇臂,摇臂另一端铰接推杆顶部,推杆底部设有机器狗足,推杆非端部铰接下支持臂,下支持臂另一端固连下方的第二舵机输出轴。结构简单,由第一舵机控制上支持臂和第二舵机控制下支持臂,采用双舵机并排结构以控制腿的运动,步态更为稳定,运动更为流畅,这是一般的双舵机串联结构无法做到的。因此,本实用新型实施例稳定性更好,适应环境更强。适应环境更强。适应环境更强。
技术研发人员:陈为平 饶孟宇 黄捷 林瑞全
受保护的技术使用者:福州大学
技术研发日:2021.09.09
技术公布日:2022/1/18