1.本实用新型涉及四旋翼无人机技术领域,尤其涉及一种可变形的四旋翼无人机桨护圈。
背景技术:
2.现如今,大部分的航拍或测绘等任务已经由多旋翼无人机或混合固定翼无人机所接手。在民用领域大批的商品级多旋翼无人机和自组多旋翼无人机已经变得并不罕见,以四旋翼无人机为代表的多旋翼无人机拥有着高机动性、操作简单、飞行稳定结构简单等优势,同时也在电力、消防、治安、交通、测绘、农业等等领域占据越来越多的份额。
3.多旋翼无人机是由多个独立转动的旋翼通过主控实时调整各个电机的转速实现稳定飞行,同时外露的旋翼也就成为了一大危险处,高速旋转的旋翼在飞行中容易受到外界物体碰撞,尤其是丛林等树枝茂密的作业环境,亦或在城市中飞行,飞手可能受到视野限制无法观测到桨尖到墙面的具体距离,从而有可能造成旋翼打到墙壁等物体造成空中事故。虽然目前各种视觉避障超声波避障层出不穷,但容易受到环境限制无法实时保证着旋翼与物体间的安全距离,同时视觉避障系统的价格不菲。桨护圈作为一种廉价的直接接触型的保护措施能够使得无人机的旋翼与外界物体始终保持绝对的安全距离,同时具备一定的抗正面冲击能力,在自组无人机人群中比较受欢迎,商品级无人机也会为初级用户提供桨护圈保证安全飞行。
4.多旋翼无人机的起落架作为无人机的起降部件,避免了无人机挂载的航测设备(单反云台相机、激光雷达、热成像等机载设备)与地面直接接触,同时架高多旋翼使得旋翼能够远离地面,起飞时不受地面气流的影响同时也保证了一定的安全性。但随着航拍测绘的要求越来越高,位于云台相机两侧的起落架就会在拍摄时进入相机视野使得画面被破坏,于此同时市面上也推出了可变型的起落架,能够在起飞和降落时放下保证安全,在空中飞行时向上收起脱离相机视野。对于四旋翼这种载重较小的无人机既要保证飞行中桨的安全,又要保证拍摄画面无其他物体,桨护圈和可变形起落架就成了必不可少的装备,但这使的四旋翼无人机的冗余载重大大降低,使得有效飞行时间减小、降低工作效率,在飞行中无法实时保证旋翼的安全。
技术实现要素:
5.本实用新型的目的在于提供一种可变形的四旋翼无人机桨护圈,解决了在飞行中无法实时保证旋翼安全的技术问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种可变形的四旋翼无人机桨护圈,包括主体,所述主体的底部外壁固定连接有舵机,所述舵机外壁设置有花键,所述花键的外壁转动连接有连杆,所述连杆远离花键的一端转动连接有舵机摇臂,所述舵机摇臂的内壁转动连接有传动杆,所述传动杆的外壁固定连接有支撑杆,所述支撑杆远离传动杆的一端固定连接有桨护圈。
7.优选的,所述主体的外壁固定连接有支架,所述支架的外壁固定连接有固定组件,所述固定组件的顶部外壁固定连接有四旋翼电机。
8.优选的,所述四旋翼电机的输出端固定连接有旋翼。
9.优选的,所述固定组件的底部外壁固定连接有机架连接件,所述机架连接件位于四旋翼电机的下方。
10.优选的,所述桨护圈的数量为两个,所述桨护圈的力臂和舵机摇臂的力臂长度相同。
11.与相关技术相比较,本实用新型提供的一种可变形的四旋翼无人机桨护圈具有如下有益效果:通过结合桨护圈和可变形起落架的优势,能够实现在飞行中实时保证旋翼的安全,并能够在起飞降落时由桨护圈充当起落架保证机载航测设备的安全,使其能够满足更多特殊需求。
附图说明
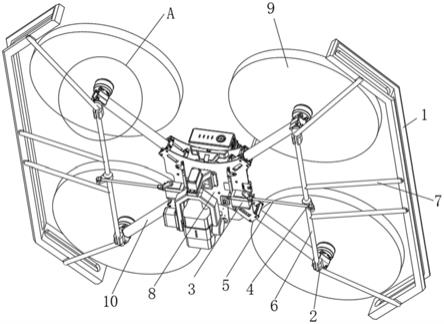
12.图1为本实用新型的结构示意图;
13.图2为本实用新型的支撑杆处结构示意图;
14.图3为本实用新型的连杆处结构示意图;
15.图4为本实用新型的部分结构爆炸图;
16.图5为本实用新型的图2中a处结构放大图。
17.图中:1、桨护圈;2、机架连接件;3、舵机;4、舵机摇臂;5、连杆;6、传动杆;7、支撑杆;8、主体;9、旋翼;10、支架。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.实施例:
20.请参阅图1-5,本实用新型提供一种技术方案:一种可变形的四旋翼无人机桨护圈,包括主体8,主体8的底部外壁固定连接有舵机3,舵机3外壁设置有花键,花键的外壁转动连接有连杆5,连杆5远离花键的一端转动连接有舵机摇臂4,舵机摇臂4的内壁转动连接有传动杆6,传动杆6的外壁固定连接有支撑杆7,支撑杆7远离传动杆6的一端固定连接有桨护圈1,主体8的外壁固定连接有支架10,支架10的外壁固定连接有固定组件,固定组件的顶部外壁固定连接有四旋翼电机,四旋翼电机的输出端固定连接有旋翼9,固定组件的底部外壁固定连接有机架连接件2,机架连接件2位于四旋翼电机的下方,桨护圈1的数量为两个,桨护圈1的力臂和舵机摇臂4的力臂长度相同。
21.本实施例中,机架连接件2设置在四旋翼电机下方通过螺丝连接,桨护圈1内侧与机架连接件2配合使桨护圈1能够相对于机架转动,舵机3通过螺丝与无人机的主体8连接到一起,舵机摇臂4通过花键与舵机3连接到一起,连杆5通过螺丝与舵机摇臂4相连,通过舵机3驱动使得桨护圈1实现变形动作,通过遥控器或主控控制舵机3完成桨护圈1的收放动作,
起飞前桨护圈1与地面垂直充当起落架,保护无人机旋翼及机载航测设备,起飞后由遥控器或主控控制两侧的舵机3各自旋转90
°
带动舵机摇臂4通过连杆5使得桨护圈1绕机架连接件2旋转90
°
,使得两侧的桨护圈1与桨平面平行,起到在空中保护旋翼9的目的,桨护圈1和舵机摇臂4的力臂长度相同,使得舵机摇臂4旋转的度数与桨护圈1绕机架连接件2旋转的度数相同,同时舵机3在通电时能够很好的保证输出轴的扭力保持,能够保证在飞行中及起飞降落中桨护圈1的位置稳定。
22.工作原理:通过桨护圈1内侧与机架连接件2配合使桨护圈1能够相对于机架转动,通过舵机3驱动使得桨护圈1实现变形动作,通过遥控器或主控控制舵机3完成桨护圈1的收放动作,起飞前桨护圈1与地面垂直充当起落架,保护无人机旋翼及机载航测设备,起飞后由遥控器或主控控制两侧的舵机3各自旋转90
°
带动舵机摇臂4通过连杆5使得桨护圈1绕机架连接件2旋转90
°
,使得两侧的桨护圈1与桨平面平行,起到在空中保护旋翼9的目的,桨护圈1和舵机摇臂4的力臂长度相同,使得舵机摇臂4旋转的度数与桨护圈1绕机架连接件2旋转的度数相同,同时舵机3在通电时能够很好的保证输出轴的扭力保持,能够保证在飞行中及起飞降落中桨护圈1的位置稳定。
23.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。