1.本实用新型涉及船舶技术领域,具体涉及节能型防污海洋船舶。
背景技术:
2.目前的船舶由于海水具有一定的腐蚀效果,而且海洋生物的威胁,导致船舶底部的防腐防锈层经常被海洋生物损坏,导致船舶入手部分破损,需要经常使用水下机器人来进行清洗。
3.因此亟待一种能够在保证防腐防锈效果的同时,能够减少海洋生物的威胁,减少防腐防锈层的损伤的节能型防污海洋船舶。
技术实现要素:
4.本实用新型的目的是针对现有技术中存在的上述问题,提供了节能型防污海洋船舶。
5.为了实现上述实用新型目的,本实用新型采用了以下技术方案:节能型防污海洋船舶包括船舶本体,该船舶本体表面设有防腐层和防污层,该防污层设于所述防腐层外;所述船舶本体的底部设有沿船舶本体底部轮廓设置的多个滑轨,每个所述滑轨上设有一滑动清洗机器人,且该滑动清洗机器人上设有空化清洗盘;通过该空化清洗盘,所述滑动清洗机器人能够沿所述滑轨滑动对船舶本体的底部进行清洗。
6.工作原理及有益效果:1、与现有技术相比,本技术通过防腐层和防污层在保证了基本的防腐防污防锈效果的同时,通过滑动机器人在滑轨上滑动,利用空化清洗盘对船舶本体表面进行清洗,只需要定期清洗就能够保证船舶本体表面大部分区域不会有海洋生物附着,保证了防腐层和防污层的使用寿命,从而显著提高了船舶本体的防腐防锈能力;
7.2、本技术不需要采用外部的水下机器人即可实现清洁,只需要借助自身的能源,有效地利用自身能源,节省了外部设备的能源,与现有技术相比更加节能环保。
8.进一步地,所述滑动清洗机器人通过脐带电缆与所述船舶本体内部连接,通过该脐带电缆对所述滑动清洗机器人供电和供水。
9.此设置,采用水下机器人常用的脐带电缆,不仅是能够保证滑动清洗机器人的电能,还有是为了能够传输高压水,实现空化清洗盘能够喷出高压水对船舶本体表面进行清洗。
10.进一步地,所述滑轨上设有滑动槽,所述滑动清洗机器人上设有电动滑动轮,通过该电动滑动轮驱动所述滑动清洗机器人沿所述滑动槽滑动。
11.此设置,可以轻松实现滑动清洗机器人在船舶本体的底部轮廓上滑动,实现对船舶本体表面的清洗,尤其是对于入水部分进行清洗。
12.进一步地,所述电动滑动轮的数量至少为四个。
13.此设置,能够保证滑动清洗机器人拥有足够的动力在滑轨上滑行。
14.进一步地,所述滑动槽位于所述船舶本体表面的内侧位置,所述空化清洗盘与所
述船舶本体表面具有间隙。
15.此设置,使得滑动槽不凸出于船舶本体表面,从而减少对船舶本体的整体流线型的影响,也使得滑动槽不易受损。
16.进一步地,所述滑轨的起始端位于所述船舶本体的正前方,末端位于所述船舶本体的正后方。
17.此设置,使得滑动清洗机器人在初始状态时,是在船舶本体的正前方的,因此此时滑动清洗机器人在水上,不会长时间在水下,滑动清洗机器人能够得到较好的保护,只有在工作时才进入水下。
18.进一步地,所述滑轨上同样设有防污层和防腐层。
19.此设置,可以更好地保护滑轨,保证滑动清洗机器人能够顺畅地在滑轨上滑动。
20.进一步地,所述防污层为双亲性硅基功能聚合物与润滑油的混合物。
21.此设置,采用了现有技术中的双亲性硅基功能聚合物与润滑油的混合物,可以极大地提高防污能力。
附图说明
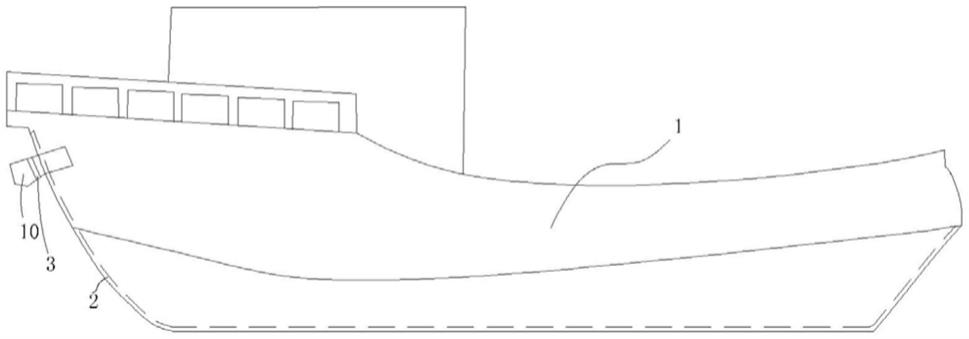
22.图1是本实用新型的结构示意图;
23.图2是图1中的滑轨示意图。
24.图中,1、船舶本体;2、滑轨;3、滑动清洗机器人;4、空化清洗盘;5、脐带电缆;6、滑动槽;7、滑动轮;8、防水电机;9、转轴;10、保护罩。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
26.本领域技术人员应理解的是,在本实用新型的披露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本实用新型的限制。
27.如图1-2所示,本节能型防污海洋船舶包括船舶本体1,该船舶本体1表面设有防腐层和防污层,该防污层设于防腐层外,其中船舶本体1为常见的船舶形状,而防腐层材料为本领域常见的材料,防污层可以采用cn111808291a中公开的一种双亲性硅基功能聚合物及其制备方法中的材料,也就是其公开的双亲性硅基功能聚合物的应用方式,将双亲性硅基功能聚合物与硅油混合,涂覆于需抗海洋生物污损的表面,也就是本船舶本体1表面,可以有效降低海洋污损生物吸附,在抗海洋生物污损方面具有广阔的应用前景。当然还可以是其他的材料,不仅限于此材料。
28.具体地,船舶本体1的底部设有沿船舶本体1底部轮廓设置的多个滑轨2,每个滑轨2上设有一滑动清洗机器人3,且该滑动清洗机器人3上设有空化清洗盘4,其中滑动清洗机
器人3实际上就是具有防水功能的水下机器人,其通过四个电动滑动轮7在滑轨2的滑动槽6内滑动,从而沿着船舶本体1滑动,通过该空化清洗盘4,滑动清洗机器人3能够沿滑轨2滑动对船舶本体1的底部进行清洗。其中电动滑轮为常见的防水电机8通过齿轮带动转轴9旋转,转轴9带动滑动轮7旋转的结构,这里不再对其原理进行赘述。
29.优选地,滑轨2上同样设有防污层和防腐层,可以更好地保护滑轨2,保证滑动清洗机器人3能够顺畅地在滑轨2上滑动。
30.其中,在本实施例中采用的空化清洗盘4可采用cn211001749u中公开的一种水下机器人用空化清洗盘4,清洗效率高、性能稳定、安全可靠的优点。
31.在本实施例中,滑动清洗机器人3通过脐带电缆5与船舶本体1内部连接,通过该脐带电缆5对滑动清洗机器人3供电和供水,采用水下机器人常用的脐带电缆5,不仅是能够保证滑动清洗机器人3的电能,还有是为了能够传输高压水,实现空化清洗盘4能够喷出高压水对船舶本体1表面进行清洗,其中脐带电缆5可采用cn209691464u中公开的一种具有光纤保护功能的水下机器人脐带电缆5,具有能够有效避免传统电缆在水下机器人设备使用时带来的弊端,有效保护光纤信号不受干扰。
32.优选地,滑动槽6位于船舶本体1表面的内侧位置,空化清洗盘4与船舶本体1表面具有间隙,间隙保证空化清洗盘4能够拥有足够的空间来保证其清洗效果,而且滑轨2的起始端位于船舶本体1的正前方,末端位于所述船舶本体1的正后方,使得滑动清洗机器人3在初始状态时,是在船舶本体1的正前方的,因此此时滑动清洗机器人3在水上,不会长时间在水下,滑动清洗机器人3能够得到较好的保护,只有在工作时才进入水下。
33.在本实施例中,在船舶本体1的前端具有供滑动清洗机器人3进入的保护罩10,当滑动清洗机器人3在初始状态时,进入到保护罩10内,滑动清洗机器人3从船头滑动到船尾,再从船尾滑动到船头,完成一次清洗,回到保护罩10内。
34.综上,与现有技术相比,本技术通过防腐层和防污层在保证了基本的防腐防污防锈效果的同时,通过滑动机器人在滑轨2上滑动,利用空化清洗盘4对船舶本体1表面进行清洗,只需要定期清洗就能够保证船舶本体1表面大部分区域不会有海洋生物附着,保证了防腐层和防污层的使用寿命,从而显著提高了船舶本体1的防腐防锈能力,本技术不需要采用外部的水下机器人即可实现清洁,只需要借助自身的能源,有效地利用自身能源,节省了外部设备的能源,与现有技术相比更加节能环保。
35.本实用新型未详述部分为现有技术,故本实用新型未对其进行详述。
36.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
37.尽管本文较多地使用了船舶本体1、滑轨2、滑动清洗机器人3、空化清洗盘4、脐带电缆5、滑动槽6、滑动轮7、防水电机8、转轴9、保护罩10等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
38.本实用新型不局限于上述最佳实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本技术相同或相近似的技术方案,均落在本实用新型的保护范围之内。