一种auv避碰训练系统
技术领域
1.本发明属于auv自主避碰技术领域,涉及一种auv避碰训练系统,特别是一种基于模块化模拟障碍物的auv避碰训练系统
背景技术:
2.水下无人航行器auv(autonomous underwater vehicle)是指无人驾驶,自主控制在水下航行的器具。随着auv技术的不断发展,auv在海洋环境研究以及海洋资源探测方面具有广泛的应用前景。海洋是一个复杂多变的环境,水下无人航行器在工作航行时,需要面对来自海面的障碍物,如航行的船只,浮标等;水中的障碍物,如大型鱼类等;水面以下的障碍物如水下峡谷,岩壁等障碍碰撞的威胁,严重的话将会导致auv发生损害。所以如何躲避障碍物,就成了auv技术研究中的一个重要的研究方向。
3.auv在动态、复杂的海洋环境中能够高度自治,就必须对海洋环境中不同位置、尺寸的障碍物都具备很高的避障控制能力。为了提高避障能力,就需要设置避碰试验场地对auv进行避碰训练。在避碰训练中,为了满足多样的工况要求,需要模拟出来自水面、水中以及水底尺寸不一的障碍物。同时,针对训练auv与障碍物发生碰撞将导致auv发生损坏的问题,也需要考虑到在试验过程对auv进行保护。所以说在避碰训练中,如何在水面、水中以及水底都需要设置尺寸可变的障碍物,同时能够感应到碰撞的发生,安全、高效开展auv避碰训练试验工作,成了auv避碰试验中需要解决的问题。
4.auv的自主避碰相关问题的研究目前集中于自主避碰系统组成、智能避碰算法、声呐数据滤波等方面。目前用于auv避碰的方法层出不穷,主要有随机抽样、线性拟合、势场法、蚁群算法、量子行为算法等。比如文章《基于传感器的水下机器人动态避障研究》中使传感器采集障碍信息,采用栅格法把传感器采集的信息进行描述,使auv能够躲避障碍物,达到航行要求。但是相关的避碰方法进行实际测试的时候都没有涉及到障碍物的设置以及碰撞后对auv的保护问题,auv可能在避碰训练中发生碰撞遭到损害。专利《一种带安全防护气囊的auv多向避碰能力训练系统》中提出了通过测距声呐测量auv与障碍间的距离,避障计算机控制阀门,对收放式安全气囊充气对auv进行保护的方法,有效地解决了auv碰撞受损的问题。但是该系统在具体实施过程中存在着不便,比如气囊在充放气过程中,需要auv对照预先设定的深度姿态推力对照表的数据配合进行浮力调节,该过程存在不易控制的问题。另外该系统需要在训练auv加装气囊以及充放气装置,在具体实施过程存在着不易实现,成本过高的问题,无法布置在一个适用于多种auv的避碰能力训练系统中。
技术实现要素:
5.针对上述现有技术,本发明要解决的技术问题是提供一种基于模块化模拟障碍物的auv避碰训练系统,在auv碰撞训练演习中提供能够设置在不同水深,可以改变尺寸大小的模块化障碍物,同时在训练中对auv提供碰撞保护以及碰撞检测。
6.为解决上述技术问题,本发明提供了一种auv避碰训练系统,包括气囊模块、总控
模块和重物模块,气囊模块为模拟障碍物,包括立柱、设置在立柱周围的防护气囊以及压力传感器,压力传感器用于检测是否发生碰撞;
7.总控模块包括控制单元、无线电天线和电源,电源为压力传感器、无线电天线供电;控制单元接收压力传感器(传输的碰撞信息,然后将碰撞信息通过无线电天线发送至远程监控台;
8.重物模块包括重物和长度可调的牵引部件,重物通过牵引装置与立柱连接。
9.进一步的,总控模块还包括超声波振子,电源为超声波振子供电,控制单元根据碰撞信息控制超声波振子发射超声波至auv搭载的声呐,auv将超声波信号转化为碰撞信息并发送至远程监控台。
10.进一步的,立柱由轻型材料制成,具备密封防水性能,在避碰训练中,根据试验要求更改立柱尺寸大小,提供不同大小的模拟障碍物。
11.进一步的,压力传感器均匀分布于气囊外侧内壁。
12.进一步的,无线电天线以及电源通过设置在浮力材料上浮于水面之上。
13.进一步的,控制单元和超声波振子设置在立柱内部的密封舱内。
14.进一步的,通过调节牵引部件长度改变重物和气囊模块的连接方式,将气囊模块设置为锚泊式和漂浮式;
15.锚泊式是将重物作为锚固定于水底,通过调节牵引部件长度改变气囊模块在水中的固定深度,模拟在水面、水中以及水底保持静止状态的障碍物;
16.漂浮式是通过调节牵引部件长度将重物与气囊立柱连接为一体,通过调节重物大小模拟漂浮于水面或悬浮于水中状态的障碍物。
17.本发明的有益效果:本发明能够为auv避碰训练中提供模拟障碍物,本发明不但能够模拟出位于不同水深,不同运动状态的障碍物,而且能够组合形成不同尺寸大小的障碍物类型,为auv避碰训练的开展提供支撑。本发明能够对进行训练的auv提供碰撞保护,避免auv碰撞受损,同时能够检测实时碰撞信息并发送给远程监控台,保证auv碰撞训练工作连续有效开展。基于以上特点,本发明能够用于搭建一个适用多种auv的避碰能力训练水域,使训练auv高效、安全地开展避碰训练。
附图说明
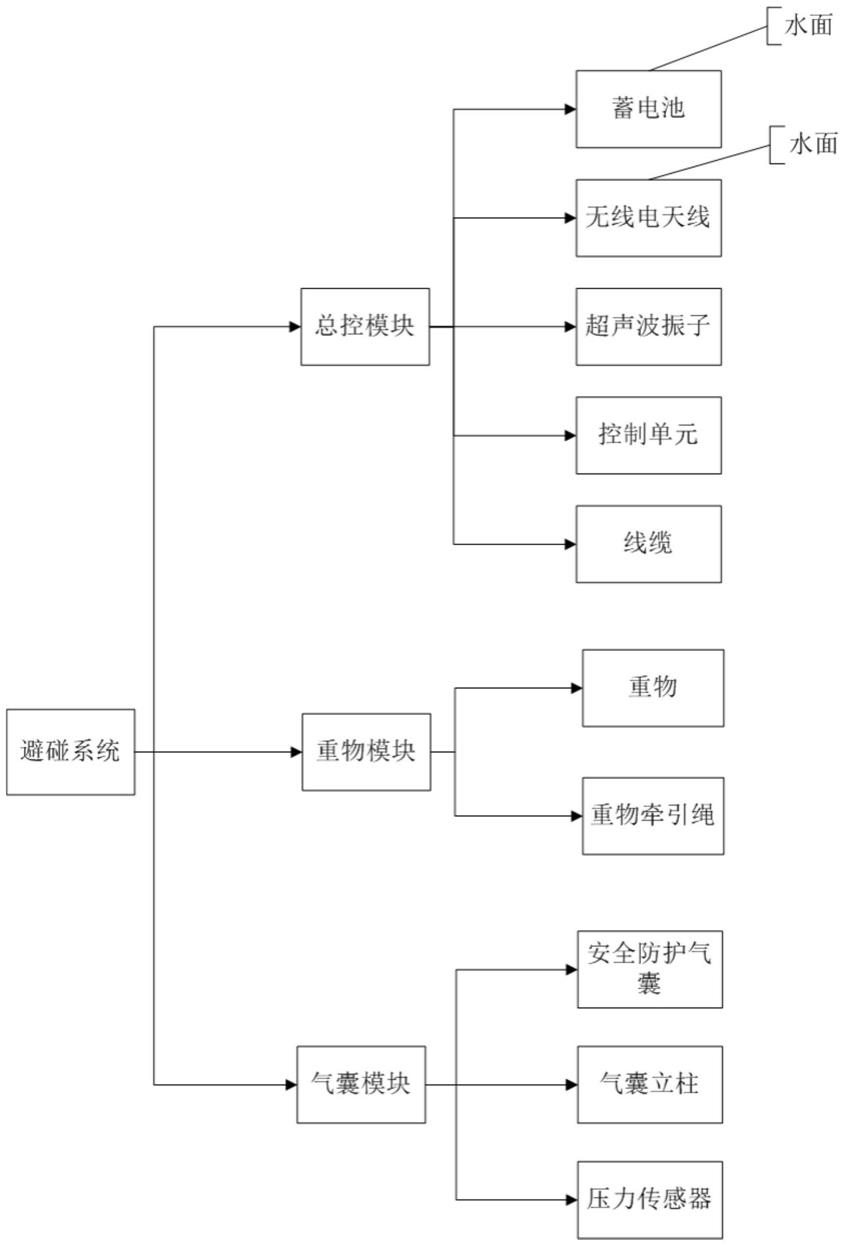
18.图1为本发明auv避碰系统的组成框图。
19.图2(a)为本发明的气囊模块的正面示意图。
20.图2(b)为本发明的气囊模块的俯视示意图。
21.图3为本发明的避碰试验中实时碰撞信息传递流程图。
22.图4为本发明auv避碰系统的锚泊式示意图。
23.图5为本发明auv避碰系统的漂浮式示意图。
具体实施方式
24.下面结合说明书附图和具体实施例对本发明做进一步说明。
25.结合图1,本发明的一种基于模块化组合模拟障碍物的auv避碰训练系统,包括:总控模块,重物模块,气囊模块。
26.结合图2(a)和图2(b),气囊模块设置为障碍物,气囊模块由气囊立柱1、四周的安全防护气囊3以及若干压力传感器2所组成。
27.气囊立柱1由轻型材料制作,同时需具备良好的密封防水性能,在避碰训练中,可根据试验要求更改支柱尺寸大小,以此提供不同大小的模拟障碍物,气囊立柱1内置控制单元4、超声波振子5。安全防护气囊3附着于气囊立柱1外表面,安全防护气囊为椭圆条形,在其侧部可与气囊立柱拼接组合,形成不同尺寸大小的气囊模块,用于模拟不同大小的障碍物,并在碰撞时对试验auv提供保护的同时,也可以提供浮力,使整个气囊模块能够浮于水面。压力传感器2均布于安全防护气囊3外侧内壁,用于检测安全防护气囊3是否与auv发生碰撞。当auv与安全防护气囊3发生碰撞时,压力传感器2检测到压力变化会产生电平变化,并将电平变化信息通过传导给控制单元4。
28.结合图4所示,总控模块由安装在气囊立柱1内部密封舱的控制单元4、超声波振子5、漂浮在水面的无线电天线6、蓄电池7以及线缆8所组成。
29.无线电天线6以及蓄电池7安装在浮力材料上,具备一定的浮力,浮于水面之上。
30.总控模块在整个训练系统中起到供电,控制,传递信息等作用。线缆8集合了电缆与网线;蓄电池7通过线缆8能够为压力传感器2,超声波振子5以及控制单元4供电;控制单元4能够接收安装于各个安全防护气囊3内部的压力传感器2的实时碰撞信息,并且通过线缆8向无线电天线6传输实时碰撞信息,另外控制单元4接收到实时碰撞信息后能够控制超声波振子5发射超声波,试验中能提供通讯协议以供auv声呐检测;无线电天线6能够向远程监控台发送实时碰撞信息。超声波振子5可以进一步避免训练环境改变对结果的影响,降低判断失误的可能性。
31.重物模块由重物牵引绳9以及重物10所组成。重物模块用于提供重力,固定整个障碍物模块的位置。重物10与气囊立柱1间使用重力牵引绳9连接或直接组合成一个整体,能够模拟处于多种状态的障碍物,如图4与图5所示。
32.本实施方式的auv在试验场地进行避碰算法测试时,工作流程如图3所示。
33.步骤一:auv在训练过程中与试验场地所布置的障碍发生碰撞,障碍物外表面安装的安全防护气囊能够给试验auv提供碰撞保护。
34.步骤二:安全防护气囊3内部安装的压力传感器2能够收到实时碰撞信息,压力传感器2检测到压力变化会产生电平变化,并将电平变化信息传导给控制单元4。
35.步骤三:控制单元4接收到来自一个或多个安全防护气囊3传导的实时碰撞信息后,可以将实时碰撞信息通过无线电天线6传达给远程监控台。
36.实时碰撞信息传达给远程监控台,具体实现方式为:
37.1.控制单元4通过线缆8将实时碰撞信息传递给无线电天线6,无线电天线6发送数据传达给远程监控台;
38.2.控制单元4接收到实时碰撞信息后,控制超声波振子5发射超声波,auv通过声呐接收到超声波信号后,判断auv与设置的障碍物发生了碰撞,并把实时碰撞信息传达给水面监控台。
39.通过两种实时碰撞信息传达模式相互配合,可以及时准确地监测auv避碰试验时是否出现碰撞,便于水面监控端及时停止试验,分析碰撞原因等。
40.不同状态的障碍物是指通过调节重物模块和气囊模块的连接方式,将障碍物设置
为锚泊式和漂浮式。
41.锚泊式如图4所示,是指将重物模块作为锚,固定整个障碍物系统于一个特定的位置。重物模块固定于水底,其与气囊立柱之间通过长度可调节的重物牵引绳9连接,通过调节重物牵引绳9长度可以改变气囊模块在水中的深度,用以模拟在水面、水中以及水底保持静止状态的障碍物。
42.漂浮式如图5所示,主要是为了模拟水面上以及水中随海浪和海流运动的障碍物,其重物模块提供重力,并组合于气囊立柱上,通过调节重物模块大小可以使其达到漂浮于水面或悬浮于水中并随之运动的效果。