1.本技术涉及飞行器技术领域,尤其是涉及一种防撞无人机。
背景技术:
2.无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。
3.与载人飞机相比,无人机具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。其可以利用无线电遥控设备和自备程序进行操纵。
4.针对上述中的相关技术,发明人认为无人机在错误操纵或者操纵失误等情况下易与墙体等发生碰撞,碰撞时无人机的螺旋桨叶撞击在墙体上易致使螺旋桨叶损坏。
技术实现要素:
5.为了使得无人机与墙体碰撞时其螺旋桨叶不易受损,本技术提供一种防撞无人机。
6.本技术提供的一种防撞无人机采用如下的技术方案:
7.一种防撞无人机,包括机体,所述机体包括转动设置在机体上的螺旋桨叶,所述机体的外沿设有防撞机构,所述螺旋桨叶在机体上的投影位于防撞机构对应的区域内。
8.通过采用上述技术方案,机体在错误操纵下与墙体等发生碰撞时,防撞机构优先于螺旋桨叶与墙体相抵接,以使得防撞机构可以对螺旋桨叶型号才能防护,从而使得螺旋桨叶不易受损。
9.可选的,所述防撞机构包括防撞架,所述防撞架与螺旋桨叶一一对应,所述防撞架的一端设在机体上,防撞架的另一端沿远离机体的方向延伸。
10.通过采用上述技术方案,防撞架采用一对一的方式对螺旋桨叶形成防护,可以设置机体无论以哪个角度与墙体相碰撞时,防撞架均可以对螺旋桨叶形成防护。
11.可选的,所述防撞架上设有减重镂空。
12.通过采用上述技术方案,减重镂空用于减轻防撞架的重量,从而减小防撞无人机整体的自重,进而减小防撞架的设置对防撞无人机航速的影响。
13.可选的,所述防撞架设在螺旋桨叶靠近地面的一侧,所述防撞架远离机体的一端沿靠近螺旋桨叶的方向延伸。
14.通过采用上述技术方案,使得防撞架与墙体相抵接时,防撞夹可以驱使机体转动,并使得螺旋桨叶远离墙体,从而使得螺旋桨叶不易与墙体碰撞。
15.可选的,所述防撞架靠近机体的一端滑移设置在机体上,所述机体设有供防撞架滑移的滑移通道,所述滑移通道内设有缓冲件。
16.通过采用上述技术方案,防撞架与墙体相抵接时,驱使滑块在滑移通道内滑移,并对缓冲件进行压缩,以使得缓冲件对防撞架形成缓冲,从而减小防撞架和墙体之间产生的冲击。
17.可选的,所述缓冲件包括缓冲弹簧,所述缓冲弹簧的一端固定在缓冲架靠近机体的一端上,缓冲弹簧的另一端固定在滑移通道内。
18.通过采用上述技术方案,防撞架与墙体相抵接时,即可驱使滑块对弹簧进行压缩;防撞架与墙体相分离时,抵接弹簧即可复位,从而驱使防撞架复位,以便于防撞架再次对螺旋桨叶起到保护效果。
19.可选的,所述滑移通道的内侧壁设有榫槽,所述防撞架靠近榫槽的一侧设有榫头,所述榫头滑移设置在榫槽内。
20.通过采用上述技术方案,榫头与榫槽相配合,使得滑块在滑移通道内的滑移更加平稳顺畅。
21.可选的,所述机体靠近地面的一侧设有起落架。
22.通过采用上述技术方案,起落架用于对机体形成支撑,从而以便于机体的起落。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.机体在错误操纵下与墙体等发生碰撞时,防撞机构优先于螺旋桨叶与墙体相抵接,以使得防撞机构可以对螺旋桨叶型号才能防护,从而使得螺旋桨叶不易受损;
25.2.防撞架与墙体相抵接时,驱使滑块在滑移通道内滑移,并对缓冲件进行压缩,以使得缓冲件对防撞架形成缓冲,从而减小防撞架和墙体之间产生的冲击。
附图说明
26.图1是本技术实施例防撞无人机整体的结构示意图;
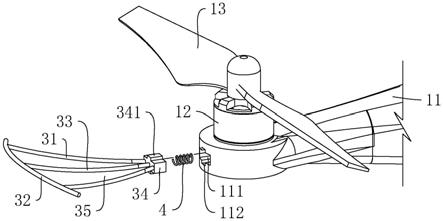
27.图2是本技术实施例中防撞架和悬臂的爆炸图。
28.附图标记说明:1、机体;11、悬臂;111、滑移通道;112、榫槽;12、驱动电机;13、螺旋桨叶;14、控制主体;2、起落架;3、防撞架;31、边杆;32、弧形杆;33、加强杆;34、滑块;341、榫头;35、减重镂空;4、缓冲弹簧。
具体实施方式
29.以下结合附图1
‑
2对本技术作进一步详细说明。
30.本技术实施例公开一种防撞无人机。参照图1,防撞无人机包括机体1和起落架2。
31.机体1用于满足防撞无人机的控制功能和飞行功能,以使得无人机可以达到指定位置。起落架2设在机体1靠近地面的一侧,起落架2用于对机体1形成支撑,以便于机体1的起落。
32.参照图1,机体1包括悬臂11、驱动电机12、螺旋桨叶13和控制主体14。其中悬臂11的一端固定在控制主体14上,驱动电机12固定在悬臂11远离控制主体14的一端,驱动电机12与控制主体14电连接,螺旋桨叶13固定在驱动电机12的输出端,驱动电机12可以驱使螺旋桨叶13转动。本实施例中,悬臂11、驱动电机12和螺旋桨叶13在控制主体14的外沿均布有四组。
33.悬臂11远离控制主体14的一端设有防撞机构。防撞机构用于对螺旋桨叶13形成防护,以使得螺旋桨叶13不易与墙体直接碰撞致使螺旋桨叶13受损。防撞机构包括防撞架3,防撞架3与螺旋桨叶13一一对应。防撞架3呈扇形,且防撞架3靠近其圆心的一端设悬臂11上,防撞架3的弧形端部沿远离悬臂11的方向延伸。
34.螺旋桨叶13的最大半径小于驱动电机12输出端与防撞架3的弧形端部之间的距离,以使得螺旋桨叶13在悬臂11上的投影位于防撞架3对应的区域内,从而使得防撞架3可以优先于螺旋桨叶13与墙体撞击,以达到对螺旋桨叶13进行保护的目的。
35.参照图1和图2,防撞架3位于螺旋桨叶13靠近地面的一侧,防撞架3包括构成扇形的两根边杆31和弧形杆32,弧形杆32固定在两根边杆31之间。两根边杆31的中间设有加强杆33,加强杆33设在扇形的角平分线上,加强杆33与弧形杆32固定连接。加强杆33和边杆31远离弧形杆32的一端均固定在滑块34上,滑块34设置为长方体状,滑块34设在悬臂11上。防撞架3与墙体相抵接时,弧形杆32受压变形并形成缓冲,从而对螺旋桨叶13形成防护。当然,防撞机构也可以直接设置为扇形的板体。
36.边杆31、弧形杆32和加强杆33之间形成有减重镂空35,减重镂空35用于减轻防撞架3的重量,从而减小防撞无人机整体的自重,进而减小防撞架3的设置对防撞无人机航速的影响。
37.参照图1和图2,悬臂11上设有滑移通道111,滑块34滑移设置在滑移通道111内。同时,滑移通道111内设有缓冲件,缓冲件可以为缓冲弹簧4,当然也可以为其他弹性伸缩件。缓冲弹簧4的一端固定在滑块34靠近悬臂11的一端上,缓冲弹簧4的另一端固定在滑移通道111的底壁上。防撞架3与墙体相抵接,防撞架3可以驱使滑块34在滑移通道111内滑移,并对缓冲弹簧4形成压缩,缓冲弹簧4对防撞架3的滑移形成缓冲,从而减小防撞架3和墙体之间产生的冲击。
38.滑移通道111相对设置的两内侧壁上均设有榫槽112,滑块34靠近榫槽112的两侧壁上均固定有榫头341。榫槽112呈矩形,榫头341为与榫槽112形状相适配的矩形块。榫头341滑移设置在榫槽112内。榫头341与榫槽112相配合,可以对滑块34在滑移通道111内的滑移进行导向和限位,以使得滑块34的滑移更加平稳。
39.参照图1和图2,加强杆33和边杆31靠近弧形杆32的一端沿靠近螺旋桨叶13的方向翻折,弧形杆32固定在加强杆33和边杆31上后倾斜设置,以使得防撞架3远离悬臂11的一端沿靠近螺旋桨叶13的方向延伸,从而防撞架3与墙体相抵接时,防撞架3可以驱使机体1翻转,且使得螺旋桨叶13远离墙体,以对螺旋桨叶13形成更佳的保护效果。
40.参照图1,起落架2设在控制主体14靠近地面的一侧。起落架2可以设置呈“u”型,起落架2的开口端与控制主体14靠近地面的一侧固定连接,起落架2的封闭端沿远离控制主体14的方向垂直延伸,起落架2的封闭端水平设置,起落架2的封闭端用于与地面相抵接。
41.本技术实施例一种防撞无人机的实施原理为:具体使用时,控制主体14控制驱动电机12转动,以使得螺旋桨叶13转动,从而使得机体1飞行。机体1正常降落时,起落架2对机体1形成支撑,以使得机体1的降落更加平稳。
42.机体1在错误操作下与墙体产生撞击时,弧形杆32在墙体的挤压下产生形变,并推动滑块34在滑移通道111内滑移。滑块34滑移时将缓冲弹簧4进行压缩,缓冲弹簧4对滑块34的滑移形成缓冲,以减小防撞架3与墙体之间的冲击。榫头341与榫槽112相配合,可以使得滑块34在滑移通道111内的滑移更加平稳。同时,防撞架3可以驱使机体1转动,并使得螺旋桨叶13远离墙体,以使得螺旋桨叶13不易撞击在墙体上受损。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。