1.本实用新型涉及飞行器技术领域,具体涉及一种可伸缩变换姿态的飞行器。
背景技术:
2.现代都市到处高楼林立,楼层之间间距大小不一,因此对飞行器的要求较高,而现有技术中的飞行器体积较大,且不能根据楼层之间间距大小进行姿态的切换或者进行伸缩以调节体积的大小,因此不能适应多种环境,在这样的环境中起降及飞行过程都很不方便,且存在一定的安全隐患,还有的,现有技术中的飞行器用途功能单一,只能单独实现载人的功能,而不能实现载人与载货的两种模式的切换使用,难以满足现代都市的多种需求。
技术实现要素:
3.本实用新型旨在提供一种可伸缩变换姿态的飞行器,以解决上述存在的问题。
4.为实现上述目的,本实用新型的技术方案为:一种可伸缩变换姿态的飞行器,包括
5.机身主控仓,其内贯通设置有一连接轴;
6.l形连接件,固定连接在机身主控仓一端;
7.载人仓,可拆卸连接在l形连接件上,载人仓内设置有临时调控系统;
8.两组伸缩机构,分别与连接轴的两端配合连接;
9.两个起落机架,位于机身主控仓的两侧且共同固定连接在两个伸缩机构上;
10.至少两个螺旋桨机组,分别对称安装在两个起落机架上;
11.两个平衡摆动控制器,分别安装在两个起落机架上并与螺旋桨机组电连接,用于控制螺旋桨机组进行转动。
12.上述技术方案,伸缩机构能够进行伸缩,进而可以调整飞行器整体的体积大小,当遇到楼层之间间隙比较小的空间时,连接轴可以带动伸缩机构及起落机架以连接轴为中心进行转动,使得伸缩机构及起落机架呈竖直状态,在该转动过程中,平衡摆动控制器不断调整螺旋桨机组进行转动,使得螺旋桨机组始终处于水平状态,以保持飞行平衡,由此来达到飞行器切换不同姿态的目的,l形连接件使得载人仓重心下移,保证载人仓稳定指地。在本实用新型能够进行伸缩变换,改变体积的大小进行升降与飞行,对周围环境进行快速应变,保证飞行安全,满足现代都市对飞行器的高要求标准。
13.可选的,为了保证伸缩机构能够灵活且稳定的带动起落机架进行运动,进而实现飞行器的稳定变换姿态飞行,每一组伸缩机构包括4个分别与连接轴配合的液压伸缩臂,且两两液压伸缩臂呈对称分布于连接轴两侧。
14.可选的,每一个螺旋桨机组包括上下两个螺旋桨,分别由上下两个电机连接控制,每个电机都是单独的控制系统,电机单独控制驱动螺旋桨,任何一个螺旋桨出故障,都不会影响其他螺旋桨的正常工作,更加安全可靠。
15.可选的,为了减少飞行阻力,所述机身主控仓的横截面大致呈菱形。
16.可选的,为了保证载人仓内驾驶员的视野开阔清晰,所述载人仓包括载人主仓和
可活动设置在载人主仓上的透明仓盖。
17.可选的,为了避免飞行器降落在不平的地面时发生滑移,同时具备减震功能,所述起落机架上设置有若干防滑支垫。
18.可选的,机身主控仓远离所述载人仓一端设置有一菱形板,保持飞行平衡。
19.可选的,所述菱形板上设置有通孔,通过螺栓穿过两个机身主控仓上的菱形板的通孔与螺母配合,且两个机身主控仓相邻两侧之间还通过两个并机连接件固定连接,实现两个机身主控仓的稳定合并连接。
20.可选的,为了达到输送物资的目的,两个机身主控仓上的l形连接件共同固定连接有一货仓。
21.本实用新型具有以下有益效果:
22.(1)本实用新型的伸缩机构进行伸缩,进而调整飞行器整体的体积大小,通过连接轴带动伸缩机构及起落机架以连接轴为中心进行转动,进而实现飞行器的形态变换,可以对周围环境进行快速应变,任意穿梭于现代都市的高楼之间,保证飞行安全,满足现代都市对飞行器的高要求标准。
23.(2)两个机身主控仓能够通过菱形板和并机连接件固定连接在一起,进而实现两个飞行器的并机,并机后的两个机身主控仓上的l形连接件还可以共同固定连接货仓,以达到输送物资的目的。
附图说明
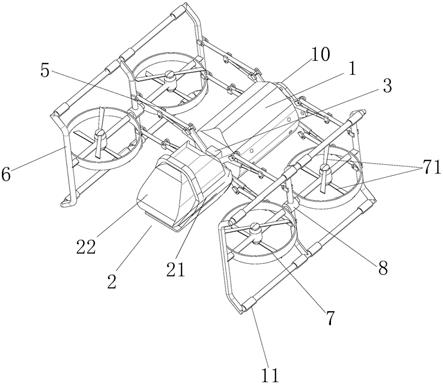
24.图1是本实用新型的实施例1在水平姿态下的示意图;
25.图2是本实用新型的实施例1在水平姿态下的俯视图;
26.图3是本实用新型的实施例1在水平姿态下的前视图;
27.图4是本实用新型的实施例1在水平姿态下的后视图;
28.图5是本实用新型的实施例1在竖直姿态下的示意图;
29.图6是本实用新型的实施例1在竖直姿态下的右视图;
30.图7是本实用新型的实施例1在竖直姿态下的后视图;
31.图8是本实用新型的实施例2在并机状态下的示意图。
32.附图标注:1、机身主控仓,2、载人仓,21、载人主仓,22、透明仓盖,3、连接轴,4、l形连接件,5、液压伸缩臂,6、起落机架,7、螺旋桨机组,71、螺旋桨,8、平衡摆动控制器,9、货仓,10、菱形板,11、防滑支垫,12、并机连接件。
具体实施方式
33.为进一步说明各实施例,本实用新型提供有附图。这些附图为本实用新型揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本实用新型的优点。图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
34.实施例1:
35.参阅图1-7所示,作为本实用新型的实施例,提供一种可伸缩变换姿态的飞行器,包括机身主控仓1,其内贯通设置有一连接轴3;l形连接件4,固定连接在机身主控仓1一端;
载人仓2,可拆卸连接在l形连接件4上,载人仓2内设置有临时调控系统;两组伸缩机构,分别与连接轴3的两端配合连接;两个起落机架6,位于机身主控仓1的两侧且共同固定连接在两个伸缩机构上;四个螺旋桨机组7,分别两两对称安装在两个起落机架6上,且其内上下分别设置有分别单独由两个电机控制的螺旋桨71;两个平衡摆动控制器8,分别安装在两个起落机架6上并与螺旋桨机组7电连接,用于控制螺旋桨机组7进行转动。
36.上述技术方案,本飞行器为无人驾驶的飞行器,机身主控仓1内还设置有中心控制系统(图未示出)、陀螺仪(图未示出)、伸缩控制组件(图未示出),陀螺仪能提供准确的方位、水平、位置、速度和加速度等信号,以便飞行器按一定的航线飞行,伸缩控制组件用于对伸缩机构进行伸缩控制,而中心控制系统驱动控制飞行器整机工作,当然的,在紧急情况下,还可以由驾驶员按照指令对临时调控系统进行操作控制,临时接管调整,保证驾驶安全,每个电机都是单独的控制系统,电机单独控制驱动螺旋桨71,任何一个螺旋桨71出故障,都不会影响其他螺旋桨71的正常工作,四个螺旋桨机组7对称设置在机身主控仓1的两侧,使得对线的两个螺旋桨机组7故障后,飞行器仍然能够正常飞行,通过伸缩控制组件对伸缩机构进行伸缩控制,进而可以调整飞行器整体的体积大小,当遇到楼层之间间隙比较小的空间时,连接轴3带动伸缩机构及起落机架6以连接轴3为中心进行转动,使得伸缩机构及起落机架6呈竖直状态(如图4所示),在该转动过程中,平衡摆动控制器8不断调整螺旋桨机组7进行转动,使得螺旋桨机组7始终处于水平状态,以保持飞行平衡,由此来达到飞行器切换不同姿态的目的,l形连接件4使得载人仓2重心下移,保证载人仓2稳定指地。本实用新型能够进行在升降或飞行过程中进行伸缩变换形态,改变体积的大小,对周围环境进行快速应变,保证飞行安全,满足现代都市对飞行器的高要求标准。
37.本实施例中,每一组伸缩机构包括4个分别与连接轴3配合的液压伸缩臂5,且两两液压伸缩臂5呈对称分布于连接轴3两侧,当连接轴3、能够带动液压伸缩臂5以连接轴3为中心进行顺时针或逆时针转动,液压伸缩臂5的设置能够保证伸缩机构的伸缩过程更加灵活且稳定,进而实现飞行器的变换姿态稳定飞行。
38.本实施例中,为了减少飞行阻力,所述机身主控仓1的横截面大致呈菱形,当然的,机身主控仓1的横截面只要符合大致呈菱形即可,不局限于严格呈菱形,还可以是其他形状,例如椭圆形等。
39.本实施例中,为了保证载人仓2内驾驶员的视野开阔清晰,所述载人仓2包括载人主仓21和可活动设置在载人主仓21上的透明仓盖22。
40.本实施例中,为了避免飞行器降落在不平的地面时发生滑移,同时具备减震功能,所述起落机架6上设置有若干防滑支垫11。
41.本实施例中,机身主控仓1远离所述载人仓2一端设置有一菱形板10,可用于保持飞行器整体飞行的平衡稳定,菱形板10上设置有通孔,可用于实现并机连接。
42.本实施例中,机身主控仓1内还设置有降落伞,保证飞行器出故障后依旧能够安全降落。
43.实施例2,为了简要起见,本实施例只描述与实施例1不同的部分:
44.参阅图8所示,本实施例中,通过螺栓穿过两个机身主控仓1上的菱形板10的通孔与螺母配合,且两个机身主控仓1相邻两侧之间还通过两个并机连接件12固定连接,实现两个机身主控仓1的稳定合并连接,即实现两个飞行器的并机,这是现有技术中的飞行器所不
具备的,且本实施例中,两个机身主控仓1上的l形连接件4共同固定连接有一货仓9,以达到输送物资的目的,且在并机状态下,如果一飞行器中的中心控制系统发生故障,可自动快速切换由另一飞行器的中心控制系统对并机进行飞行控制,提高安全性能。
45.综上所述,本实用新型所提供的飞行器,不仅可以商用载人、物资载送,还可以用于高层建筑中的消防救火等救援抢险活动。
46.尽管结合优选实施方案具体展示和介绍了本实用新型,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本实用新型的精神和范围内,在形式上和细节上对本实用新型做出的各种变化,均落入本实用新型的保护范围。