1.本发明属于农业机械技术领域,特别涉及一种行星轮系秸秆逆向差速有支撑切割防堵装置。
背景技术:
2.少免耕播种是保护性耕作中重要的技术环节之一。由于前茬作物收获后地表覆盖有大量秸秆,少免耕播种时易造成播种机堵塞、缠绕等问题,影响作业质量和作业效率。对秸秆进行切割是最常用也最有效的防堵方式之一。但目前少免耕播种机配套的秸秆切割防堵装置大部分采用单支撑或无支撑方式对秸秆进行切割,存在秸秆切割效果差、刀轴转速高、能耗高等问题,作业性能和功耗有待优化和提高。
3.中国发明专利“zl201611243010.3”,名称为“行星轮系驱动式旋耕机防缠绕装置”,通过在行星轮上安装防缠刀的方式,可有效切割刀轴上缠绕的秸秆,避免旋耕机刀轴缠草。其缺点在于旋耕刀对地表秸秆切割方式为单支撑切割,秸秆切割效果难以保证、且能较耗高。
4.中国实用新型专利“zl200520144400.6”,名称为“驱动防堵小麦免耕播种机”,通过在开沟器上方配置动力驱动粉碎刀轴,高速粉碎开沟器前方秸秆,从而避免堵塞。其通过性能良好,缺点在于粉碎方式为无支撑切割,刀轴转速高、能耗大、安全性较差。
5.因此,如何提供一种高效、低能耗的秸秆切割防堵装置是本领域技术人员亟需解决的问题。
技术实现要素:
6.针对上述技术问题,本发明的目的是提供一种行星轮系秸秆逆向差速有支撑切割防堵装置,可实现有支撑逆向差速秸秆切割,有助于提高秸秆切割效果,降低作业功耗。
7.为了实现上述目的,本发明提供了如下技术方案:
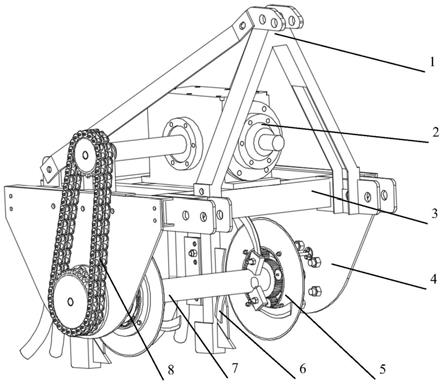
8.一种行星轮系秸秆逆向差速有支撑切割防堵装置,包括三点悬挂机构1、变速箱2、机架3、开沟器6、刀轴7和链传动机构8。
9.所述三点悬挂机构1和变速箱2固定于机架3的上部;所述机架3的左右两侧均固接有侧板4;所述刀轴7水平设置在机架1的下方,并与机架3的左、右侧板4构成转动连接;所述链传动机构8固定于机架3一侧的侧板4上,将变速箱2的动力传输至刀轴7。
10.所述装置进一步包括行星轮系防堵机构5,一对间隔一定距离且呈轴对称的行星轮系防堵机构5固接在刀轴7的圆柱面上,两个开沟器6与行星轮系防堵机构5一一对应地固定于机架3的后部。
11.所述行星轮系防堵机构5包括行星架固定杆501、圆盘刀502、行星架503、行星轮504、齿圈505、刀盘506、太阳轮507、刀座508、平面旋切刀509和行星架连接盘512。
12.所述太阳轮507固接在刀轴7的圆柱面上,所述齿圈505同圆心地布置在太阳轮507的圆周外侧,并通过螺母510和螺栓511与刀盘506固接,刀盘506和圆盘刀502固定连接;多
个行星轮504均匀地设置在太阳轮507与齿圈505之间,并分别与太阳轮507和齿圈505相互啮合。
13.所述行星轮504朝向外侧的旋转轴可转动地连接在圆环形行星架503上;所述行星架固定杆501的内端与行星架503固接,外端通过行星架连接盘512固接在侧板4上。
14.多个刀座508均匀地固接在太阳轮507朝内一侧的刀轴7的圆柱面上,且刀座508与太阳轮507之间间隔一定距离;每个刀座508中均固接有一平面旋切刀509。
15.所述开沟器6位于行星轮系防堵机构5的正后方,且开沟器6所在的竖直平面与平面旋切刀509与圆盘刀502之间的中点所在的竖直平面重合。
16.在装置的侧视方向上,平面旋切刀509的回转面与开沟器6的铲尖相交。
17.所述平面旋切刀509的回转半径大于圆盘刀502的回转半径。
18.圆盘刀502的回转速度小于平面旋切刀509的回转速度。
19.所述刀座508与太阳轮507之间间隔距离为100mm。
20.所述刀轴7的直径为76mm;所述平面旋切刀509的回转半径为225~300mm,所述圆盘刀502的回转半径为200~275mm。
21.与现有技术相比,本发明的有益效果在于:
22.(1)平面旋切刀与圆盘刀转动方向相反,且半径不同,因此刀端线速度不同,作业时相当于一种刀先压住秸秆,另一种刀进行切割,因此可形成双支撑,相较于目前常用的单种刀具的单支撑切割,更容易切断秸秆,且所需切割力相对更小,即可在提升秸秆切割效果的同时降低作业能耗;
23.(2)行星轮系通过齿轮传动,精度高;
24.(3)圆盘刀部分入土,且圆盘刀和平面旋切刀均为垂直入土,减少了土壤扰动,降低了作业功耗;
25.(4)行星轮驱动机构中的行星轮均布在刀轴圆周方向上,增强了防堵装置作业的稳定性和可靠性。
附图说明
26.图1为本发明的行星轮系秸秆逆向差速有支撑切割防堵装置的立体结构示意图;
27.图2为本发明的行星轮系秸秆逆向差速有支撑切割防堵装置的前视结构示意图;
28.图3为本发明的行星轮系防堵机构5的外侧结构示意图;
29.图4为本发明的行星轮系防堵机构5的内侧结构示意图;
30.图5为本发明的圆盘刀502与齿圈505的爆炸图;
31.图6为本发明的行星架503、行星架固定杆501和行星架连接盘512的结构示意图。
32.其中的附图标记为:
33.1 三点悬挂机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2 变速箱
34.3 机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4 侧板
35.5 行星轮系防堵机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
501 行星架固定杆
36.502 圆盘刀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
503 行星架
37.504 行星轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
505 齿圈
38.506 刀盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
507 太阳轮
39.508 刀座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
509 平面旋切刀
40.510 螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
511 螺栓
41.512 行星架连接盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6 开沟器
42.7 刀轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8 链传动机构
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
45.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
46.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
47.如图1-2所示,本发明的行星轮系秸秆逆向差速有支撑切割防堵装置,包括三点悬挂机构1、变速箱2、机架3、行星轮系防堵机构5、开沟器6、刀轴7和链传动机构8。
48.所述三点悬挂机构1和变速箱2固定于机架3的上部;所述机架3的左右两侧均固接有侧板4;所述刀轴7水平设置在机架1的下方,并与机架3的左、右侧板4构成转动连接;一对间隔一定距离且呈轴对称的行星轮系防堵机构5固接在刀轴7的圆柱面上,两个开沟器6与行星轮系防堵机构5一一对应地固定于机架3的后部,所述链传动机构8固定于机架3一侧的侧板4上,将变速箱2的动力传输至刀轴7。
49.如图3、图4、图5和图6所示,所述行星轮系防堵机构5包括行星架固定杆501、圆盘刀502、行星架503、行星轮504、齿圈505、刀盘506、太阳轮507、刀座508、平面旋切刀509和行星架连接盘512。
50.所述太阳轮507固接在刀轴7的圆柱面上,所述齿圈505同圆心地布置在太阳轮507的圆周外侧,并通过螺母510和螺栓511与刀盘506固接,刀盘506和圆盘刀502固定连接;多个行星轮504均匀地设置在太阳轮507与齿圈505之间,并分别与太阳轮507和齿圈505相互啮合。
51.所述行星轮504朝向外侧的旋转轴可转动地连接在圆环形行星架503上;所述行星架固定杆501的内端与行星架503固接,外端通过行星架连接盘512固接在侧板4上。
52.多个刀座508均匀地固接在太阳轮507朝内一侧的刀轴7的圆柱面上,且刀座508与太阳轮507之间间隔一定距离,优选为100mm;每个刀座508中均固接有一平面旋切刀509。
53.所述平面旋切刀509的回转半径大于圆盘刀502的回转半径。圆盘刀502的回转速度小于平面旋切刀509的回转速度。
54.所述开沟器6位于行星轮系防堵机构5的正后方,且开沟器6所在的竖直平面与平面旋切刀509与圆盘刀502之间的中点所在的竖直平面重合。在装置的侧视方向上,平面旋切刀509的回转面与开沟器6的铲尖相交,平面旋切刀509可切断开沟器6上所拥堵缠绕的秸秆。
55.优选地,所述刀轴7的直径为76mm;所述平面旋切刀509的回转半径为225~300mm,所述圆盘刀502的回转半径为200~275mm。
56.本发明的作业过程为:
57.作业时,拖拉机的动力经过变速箱2和链传动机构8传输给刀轴7,驱动刀轴7在装置的左视方向上,沿逆时针方向转动,同时带动太阳轮507和平面旋切刀509逆时针方向转动;太阳轮507与行星轮504形成的齿轮配合,驱动行星轮504顺时针自转;行星轮504与齿圈505形成齿轮配合,驱动齿圈505顺时针转动,同时带动刀盘506和圆盘刀502沿顺时针方向转动;圆盘刀502的回转半径小于平面旋切刀509的回转半径,且经行星轮系变速后圆盘刀502的回转速度小于平面旋切刀509的回转速度,因此与平面旋切刀509形成有支撑切割,逆向差速切断秸秆,从而防止秸秆缠绕、堵塞。
58.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。