1.本发明涉及一种隔离开关瓷瓶清扫机器人,尤其涉及一种防触电风险的隔离开关瓷瓶清扫机器人,属于变电站电气检修技术领域。
背景技术:
2.变电站隔离开关瓷瓶长期在户外运行,需要定期对绝缘体瓷瓶表面进行清扫,保障运行安全。
3.瓷瓶装在开关支架上底端离地约4.2米,顶角端约离地6米,在进行电气检修有相当一部分在电气设备的低电位环境下开展,由于具有触电风险点,往往需要停电检修。一次停电手续繁多,还不能及时进处理电气设备出现的问题,如果用目前带电机械人进行作业,设备成本非常高,对此有必要提出一种防触电风险的隔离开关瓷瓶清扫机器人。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种防触电风险的隔离开关瓷瓶清扫机器人。
5.为了实现上述目的,本发明采用了如下技术方案:
6.设计一种防触电风险的隔离开关瓷瓶清扫机器人,包括标准履带小车,所述标准履带小车的上表面固定安装有一个放置架,所述放置架上表面的一侧固定安装有一个多角度协助机械手,所述多角度协助机械手上固定安装有一个快换盘,所述快换盘上安装有一个抓传感器专用夹手,所述放置架上放置有一个绝缘子清扫专用夹手以及掏鸟窝专用夹手,位于所述多角度协助机械手一侧的放置架上固定安装有一个激光雷达,所述标准履带小车上表面的一侧三维视觉相机。
7.优选的,所述抓传感器专用夹手包括一个第一电动导轨夹手,所述第一电动导轨夹手上固定安装有两个第一工程塑料夹爪。
8.优选的,所述绝缘子清扫专用夹手包括一个第二电动导轨夹手,所述第二电动导轨夹手上固定安装有两个第二工程塑料夹爪,两个所述第二工程塑料夹爪上均固定连接有若干个高压喷气管。
9.优选的,所述掏鸟窝专用夹手包括一个第三电动导轨夹手,所述第三电动导轨夹手上固定安装有两个第三工程塑料夹爪。
10.优选的,对应所述绝缘子清扫专用夹手以及掏鸟窝专用夹手位置的标准履带小车上表面开设有一个收纳槽,且所述绝缘子清扫专用夹手以及掏鸟窝专用夹手的下端均贯穿延伸至收纳槽内。
11.本发明提出的一种防触电风险的隔离开关瓷瓶清扫机器人,有益效果在于:在使用时,可以通过激光雷达对道路扫描辅助标准履带小车移动至需要使用的位置,之后可以根据三维视觉相机进行监控,之后根据实际的需求操作多角度协助机械手,多角度协助机械手分别通过抓传感器专用夹手对电气设备低电位环境无线传感器的拆装,且通过绝缘子
清扫专用夹手对电气设备开关瓷瓶进行清理,以及通过掏鸟窝专用夹手对电气设备的鸟窝进行清理,从而使得清理作业较为安全的同时且成本较低。
附图说明
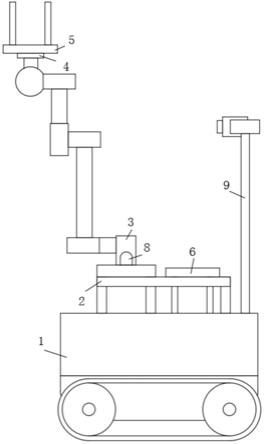
12.图1为本发明提出的一种防触电风险的隔离开关瓷瓶清扫机器人结构示意图;
13.图2为本发明提出的一种防触电风险的隔离开关瓷瓶清扫机器人的抓传感器专用夹手的结构示意图;
14.图3为本发明提出的一种防触电风险的隔离开关瓷瓶清扫机器人的绝缘子清扫专用夹手的结构示意图;
15.图4为本发明提出的一种防触电风险的隔离开关瓷瓶清扫机器人的掏鸟窝专用夹手的结构示意图。
16.图中:标准履带小车1、放置架2、多角度协助机械手3、快换盘4、抓传感器专用夹手5、第一电动导轨夹手51、第一工程塑料夹爪52、绝缘子清扫专用夹手6、第二电动导轨夹手61、第二工程塑料夹爪62、高压喷气管63、掏鸟窝专用夹手7、第三电动导轨夹手71、第三工程塑料夹爪72、激光雷达8、三维视觉相机9。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
18.参照图1-4,一种防触电风险的隔离开关瓷瓶清扫机器人,包括标准履带小车1,标准履带小车1的上表面固定安装有一个放置架2,放置架2上表面的一侧固定安装有一个多角度协助机械手3,多角度协助机械手3上固定安装有一个快换盘4,快换盘4上安装有一个抓传感器专用夹手5,放置架2上放置有一个绝缘子清扫专用夹手6以及掏鸟窝专用夹手7,位于多角度协助机械手3一侧的放置架2上固定安装有一个激光雷达8,标准履带小车1上表面的一侧三维视觉相机9。
19.其中,抓传感器专用夹手5包括一个第一电动导轨夹手51,第一电动导轨夹手51上固定安装有两个第一工程塑料夹爪52。
20.其中,绝缘子清扫专用夹手6包括一个第二电动导轨夹手61,第二电动导轨夹手61上固定安装有两个第二工程塑料夹爪62,两个第二工程塑料夹爪62上均固定连接有若干个高压喷气管63。
21.其中,掏鸟窝专用夹手7包括一个第三电动导轨夹手71,第三电动导轨夹手71上固定安装有两个第三工程塑料夹爪72。
22.其中,对应绝缘子清扫专用夹手6以及掏鸟窝专用夹手7位置的标准履带小车1上表面开设有一个收纳槽,且绝缘子清扫专用夹手6以及掏鸟窝专用夹手7的下端均贯穿延伸至收纳槽内。
23.工作原理:在使用时,首先可以根据实际使用的需求来选择抓传感器专用夹手5、绝缘子清扫专用夹手6以及掏鸟窝专用夹手7,之后通过激光雷达8对路线进行扫描,之后方便操控标准履带小车1移动,从而可以操控标准履带小车1移动至需要使用的位置,之后可以通过三维视觉相机9进行监控,然后通过多角度协助机械手3驱动夹手,此时可以通过抓
传感器专用夹手5对电气设备低电位环境无线传感器的拆装,且通过绝缘子清扫专用夹手6对电气设备开关瓷瓶进行清理,以及通过掏鸟窝专用夹手7对电气设备的鸟窝进行清理,从而使得清理作业较为安全的同时且成本较低。
24.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种防触电风险的隔离开关瓷瓶清扫机器人,其特征在于,包括标准履带小车(1),所述标准履带小车(1)的上表面固定安装有一个放置架(2),所述放置架(2)上表面的一侧固定安装有一个多角度协助机械手(3),所述多角度协助机械手(3)上固定安装有一个快换盘(4),所述快换盘(4)上安装有一个抓传感器专用夹手(5),所述放置架(2)上放置有一个绝缘子清扫专用夹手(6)以及掏鸟窝专用夹手(7),位于所述多角度协助机械手(3)一侧的放置架(2)上固定安装有一个激光雷达(8),所述标准履带小车(1)上表面的一侧三维视觉相机(9)。2.根据权利要求1所述的一种防触电风险的隔离开关瓷瓶清扫机器人,其特征在于,所述抓传感器专用夹手(5)包括一个第一电动导轨夹手(51),所述第一电动导轨夹手(51)上固定安装有两个第一工程塑料夹爪(52)。3.根据权利要求1所述的一种防触电风险的隔离开关瓷瓶清扫机器人,其特征在于,所述绝缘子清扫专用夹手(6)包括一个第二电动导轨夹手(61),所述第二电动导轨夹手(61)上固定安装有两个第二工程塑料夹爪(62),两个所述第二工程塑料夹爪(62)上均固定连接有若干个高压喷气管(63)。4.根据权利要求1所述的一种防触电风险的隔离开关瓷瓶清扫机器人,其特征在于,所述掏鸟窝专用夹手(7)包括一个第三电动导轨夹手(71),所述第三电动导轨夹手(71)上固定安装有两个第三工程塑料夹爪(72)。5.根据权利要求1所述的一种防触电风险的隔离开关瓷瓶清扫机器人,其特征在于,对应所述绝缘子清扫专用夹手(6)以及掏鸟窝专用夹手(7)位置的标准履带小车(1)上表面开设有一个收纳槽,且所述绝缘子清扫专用夹手(6)以及掏鸟窝专用夹手(7)的下端均贯穿延伸至收纳槽内。
技术总结
本发明公开了一种防触电风险的隔离开关瓷瓶清扫机器人,包括标准履带小车,所述标准履带小车的上表面固定安装有一个放置架,所述放置架上表面的一侧固定安装有一个多角度协助机械手,本发明所达到的有益效果是:在使用时,可以通过激光雷达对道路扫描辅助标准履带小车移动至需要使用的位置,之后可以根据三维视觉相机进行监控,之后根据实际的需求操作多角度协助机械手,多角度协助机械手分别通过抓传感器专用夹手对电气设备低电位环境无线传感器的拆装,且通过绝缘子清扫专用夹手对电气设备开关瓷瓶进行清理,以及通过掏鸟窝专用夹手对电气设备的鸟窝进行清理,从而使得清理作业较为安全的同时且成本较低。业较为安全的同时且成本较低。业较为安全的同时且成本较低。
技术研发人员:杜珂 于树海 梁元清 黄厚鑫 罗喜 国家栋 罗传胜
受保护的技术使用者:广西电网有限责任公司南宁供电局
技术研发日:2021.10.28
技术公布日:2022/1/28