1.本发明涉及机器人技术领域,具体是涉及一种变形机器人。
背景技术:
2.专利号为zl201810007314.2的中国发明专利申请公开了一种变结构机器人,包括上身支撑部,包括腰部支撑架、左臂第一关节、左臂第一关节内舵机、右臂第一关节、右臂第一关节内舵机、左侧胯部舵机、以及右侧胯部舵机;前端运动部,包括前驱舵机安装座、前驱舵机、前桥支撑架、前桥、左小前轮、以及右小前轮,其中,所述前驱舵机的两侧输出轴分别与前桥支撑架相连;以及双腿部,包括结构对称的左腿和右腿,其中,所述右腿包括右大腿、右内小腿、右外小腿、右大腿驱动舵机、右后轮、右后轮舵机、右踝关节、右踝关节驱动舵机、右足、以及右足舵机。此变结构机器人能够在直立行走状态和四轮驱动状态二者之间自动切换,无需外部辅助。该变结构机器人虽然能够从车形态变形成为人形态。但是,该变结构机器人在人形态时后的胸腔结构不能够进行转动。此外,该变结构机器人没有机器人头部结构。
技术实现要素:
3.为克服上述现有技术中的缺陷与不足,本发明提供一种变形机器人。该变形机器人能够从人形态状态下变形为车型态,从车形态变形为人形态。该变形机器人的胸腔结构可进行转动从而实现从人形态到车形态或从车形态到人形态的变形。此外,该变形机器人的头部可伸缩的置于机器人胸腔结构内。该变形机器人从车形态变形为人形态的过程中,机器人头部可从机器人胸腔结构内自动伸出;当变形机器人从人形态变形为车形态的过程中,机器人头部可自动缩回到机器人胸腔结构中。
4.为实现上述目的本发明的技术方案是,一种变形机器人,包括固定的安装在胸腔结构上的手臂结构、腿部结构及机器人头部,所述手臂结构包括左手臂和右手臂,所述腿部结构包括左腿部和右腿部;所述左腿部和所述右腿部互为镜像结构且对称的安装在所述胸腔结构的下部两侧;所述左手臂和所述右手臂互为镜像结构且对称的安装在所述胸腔结构的上部两侧,所述胸腔结构,包括固定安装在第二固定架上部的第一舵机,所述第一舵机的转动输出轴依次穿过所述第二固定架的顶壁、第一垫板与固定安装在第一转动架上的第一舵盘固定连接;所述第一舵盘具有圆弧形的限位开口;所述第一垫板上的限位柱活动地穿过所述限位开口;所述第一舵机的转动输出轴转动带动第一转动架转动。
5.优选的是,在所述第一转动架的上部固定安装有第一连接架,在所述第一连接架的上部固定安装有第一固定架。
6.在上述任一方案中优选的是,在所述第一固定架的后端顶部铰接有翻板;所述机器人头部可拆卸地固定安装在所述翻板上。
7.在上述任一方案中优选的是,在所述第一固定架的后端底部固定安装有第二舵机,所述第二舵机的转动输出轴上固定套装有第一驱动连杆;所述第一驱动连杆的一端与
所述第二舵机的转动输出轴固定连接,另一端铰接有第二驱动连杆;所述第二驱动连杆的一端与所述第一驱动连杆的一端固定铰接,另一端与所述翻板的底部固定铰接。
8.在上述任一方案中优选的是,在所述翻板尾部垂直地固定安装有立板;所述立板随着所述翻板的运动活动地扣接在所述第一固定架的顶部开口上。
9.在上述任一方案中优选的是,在所述限位柱上设置有轴向通孔。
10.在上述任一方案中优选的是,在所述第二固定架的底部固定安装有第三舵机。
11.在上述任一方案中优选的是,所述第三舵机的转动输出轴穿过所述第二固定架的任一侧与第二连接架的任一侧壁固定连接;所述第三舵机的支撑轴穿过所述第二固定架的另一侧与所述第二连接架的另一侧壁固定连接。
12.在上述任一方案中优选的是,所述第二连接架的一侧与所述腿部结构中的任一第四舵机固定连接,另一侧与所述腿部结构中的另一第四舵机固定连接;在所述第四舵机上转动地安装有第三车轮。
13.在上述任一方案中优选的是,所述第四舵机的转动输出轴通过舵盘与第一连接臂的一端固定连接,所述第四舵机的支撑轴插入在第二连接臂的一端上的连接孔内;所述第一连接臂的另一端与第一连接座的一侧顶部固定连接;所述第二连接臂的另一端与所述第一连接座的另一侧顶部固定连接;所述第一连接座具有双叉臂结构;所述第一连接座上的任一插臂通过舵盘与第五舵机的转动输出轴固定连接、另一插臂套装在所述第五舵机的支撑轴上。
14.在上述任一方案中优选的是,在所述第五舵机的底部固定连接有第六舵机;所述第六舵机的转动输出轴通过舵盘与第二连接架的一端的任一侧固定连接;所述第六舵机的支撑轴通过舵盘与所述第二连接架的一端的另一侧固定连接;所述第二连接架的另一端固定连接有第七舵机;所述第七舵机的转动输出轴通过舵盘与所述第二连接架的另一端的任一侧固定连接,所述第七舵机的支撑轴通过舵盘与所述第二连接架的另一端的另一侧固定连接。
15.在上述任一方案中优选的是,在所述第二连接架内固定安装有第八舵机;所述第八舵机的转动输出轴穿过所述第二连接架的侧壁与马达齿固定连接;所述马达齿一方面通过第一从动齿轮与第一车轮上的第二从动齿轮活动啮合,另一方面通过第三从动齿轮与第二车轮上的第四从动齿轮活动啮合,所述第八舵机同时带动第一车轮和第二车轮转动。
16.在上述任一方案中优选的是,所述第一从动轮通过第一连接杆转动地固定安装在所述侧壁上;所述第三从动齿轮通过第二连接杆转动地固定安装在所述侧壁上;所述第一车轮通过第三连接杆转动地固定安装在所述侧壁上,所述第二车轮通过第四连接杆转动地固定安装在所述侧壁上。
17.在上述任一方案中优选的是,所述第一连接杆、所述第二连接杆、所述第三连接杆及所述第四连接杆间隔的设置在所述第二连接架的侧壁上;所述第三连接杆和所述第四连接杆同处于一条直线上。
18.在上述任一方案中优选的是,所述第八舵机通过支撑架固定安装在所述第二连接架的安装槽内。
19.在上述任一方案中优选的是,在所述第七舵机的底部十字交叉的固定连接有第九舵机。
20.在上述任一方案中优选的是,所述第九舵机的输出轴通过舵盘与第二连接座的任一侧筋板固定连接;所述第九舵机的支撑轴通过舵盘与所述第二连接座的另一侧筋板固定连接。
21.在上述任一方案中优选的是,所述第一连接座的底部可拆卸地连接有脚部连接板。
22.在上述任一方案中优选的是,所述第一连接架的一端底部与所述手臂结构中的任一第十舵机固定连接,另一端底部与所述手臂结构中的另一第十舵机固定连接;每一个所述第十舵机的转动输出轴均通过舵盘固定连接有一个第十六舵机。
23.在上述任一方案中优选的是,所述手臂结构,还包括固定安装在第一安装座上的第十二舵机,所述第十二舵机的转动输出轴与所述第一安装座一端上的第一安装板固定连接,所述第十二舵机通过其上的转动输出轴转动地铰接在所述第一安装板上;在所述第十二舵机的壳体上固定安装有手掌部。
24.在上述任一方案中优选的是,所述第一安装座的另一端具有安装槽;在所述安装槽内固定卡接有第十三舵机。
25.在上述任一方案中优选的是,所述第十三舵机的转动输出轴通过舵盘与任一第三连接臂的一端固定连接,所述第十三舵机的支撑轴通过舵盘与另一第三连接臂的一端固定连接;任一所述第三连接臂的另一端与第一连接板的一侧固定连接;另一所述第三连接臂的另一端与所述第一连接板的另一侧固定连接。
26.在上述任一方案中优选的是,在所述第一连接板上固定安装有第十四舵机;在所述第十四舵机的转动输出轴上固定安装有第三固定架。
27.在上述任一方案中优选的是,在所述第三固定架上固定安装有第十五舵机。
28.在上述任一方案中优选的是,在所述第十五舵机的转动输出轴上固定安装有第三连接架。
29.在上述任一方案中优选的是,所述第三连接架具有两个间隔设置的第四连接臂;任一所述第四连接臂与所述第十六舵机的转动输出轴固定连接,另一所述第四连接臂套装在所述第十六舵机的支撑柱上。
30.在上述任一方案中优选的是,还包括第二安装板,所述第二安装板的一端可拆卸地扣装在所述安装槽的顶部,另一端套装在所述第十二舵机的支撑轴上;所述第十二舵机通过所述转动输出轴可翻转地置于所述第一安装板与所述第二安装板之间形成的间隙内;所述第一安装板平行于所述第二安装板。
31.在上述任一方案中优选的是,两个所述第十舵机同时处于所述第一连接架和所述第一转动架之间。
32.在上述任一方案中优选的是,在所述第一转动架的顶部通过多个连接柱固定安装有 pcb电路板,在所述pcb电路板安装有控制器。
33.在上述任一方案中优选的是,所述第一舵盘通过其连接部上的连接孔固定套装在所述第一舵机的转动输出轴上。
34.在上述任一方案中优选的是,在所述第一固定架的后端底部固定安装有第一电池;所述第一舵机上通过连接板固定安装有喇叭。
35.与现有技术相比本发明的优点在于,该变形机器人可通过控制器控制机器人各个
关节上的舵机实现从人形态到车形态的变形或者是从车形态到人形态的变形。在车形态状态下,可通过舵机实现变形机器人运动。在人形态状态下,可通过舵机实现变形机器人进行双足行走。此外,该变形机器人的机器人头部可自动从机器人的胸腔结构内伸出或者是自动缩回机器人的胸腔结构内。
附图说明
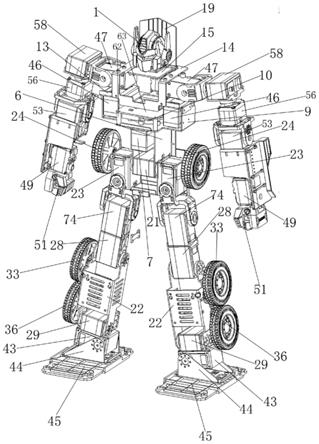
36.图1为按照本发明的变形机器人一优选实施例的立体结构示意图。
37.图2为按照本发明的变形机器人图1所示实施例变形后的立体结构示意图。
38.图3为按照本发明的变形机器人图1所示实施例不带有外部造型件的立体结构示意图。
39.图4为按照本发明的变形机器人图1所示实施例中的胸腔结构一优选实施例的立体结构示意图。
40.图5为按照本发明的变形机器人图4所示实施例中胸腔结构变形后的立体结构示意图。
41.图6为按照本发明的变形机器人图4所示实施例中不带有外部造型件胸腔结构的立体结构示意图1。
42.图7为按照本发明的变形机器人图4所示实施例中不带有外部造型件的胸腔结构立体结构示意图2。
43.图8为按照本发明的变形机器人图7所示实施例中胸腔结构的变形状态示意图。
44.图9为按照本发明的变形机器人图6所示实施例中胸腔结构的主视结构示意图。
45.图10为按照本发明的变形机器人图6所示实施例中胸腔结构后视结构示意图。
46.图11为按照本发明的变形机器人图6所示实施例中胸腔结构左视结构图。
47.图12为按照本发明的变形机器人图6所示实施例中胸腔结构右视结构示意图。
48.图13为按照本发明的变形机器人图6所示实施例中胸腔结构中不带有机器人头部及其驱动机构的立体结构示意图1。
49.图14为按照本发明的变形机器人图6所示实施例中带有第一转动架和第一舵机的胸腔结构的立体结构示意图。
50.图15为按照本发明的变形机器人图6所示实施中胸腔结构带有第一垫板的第一舵机的立体结构示意。
51.图16为按照本发明的变形机器人图6所示实施例中胸腔结构第二固定架的立体结构示意。
52.图17为按照本发明的变形机器人图6所示实施例中胸腔结构的第一舵盘的立体结构示意图1。
53.图18为按照本发明的变形机器人图6所示实施例中胸腔结构的第一舵盘的立体结构示意图2。
54.图19为按照本发明的变形机器人图6所示实施例中胸腔结构第一固定架的立体结构示意图。
55.图20为按照本发明的变形机器人图6所示实施例中胸腔结构第一连接架的立体结构示意图。
56.图21为按照本发明的变形机器人图6所示实施例中胸腔结构第一转动架的立体结构示意图。
57.图22为按照本发明的变形机器人图1所示实施例中腿部结构的一优选实施例的立体结构示意图。
58.图23为按照本发明的变形机器人图22所示实施例中腿部结构的主视结构示意图。
59.图24为按照本发明的变形机器人图22所示实施例中腿部结构变形后的立体结构示意图。
60.图25为按照本发明的变形机器人图24所示实施例中腿部结构的主视结构示意图。
61.图26为按照本发明的变形机器人图22所示实施例中腿部结构的立体装配图。
62.图27为按照本发明的变形机器人图26所示实施例中不带有腿部外部造型件的腿部结构的立体装配图。
63.图28为按照本发明的变形机器人图26所示实施例中腿部结构的连接架的立体结构示意图。
64.图29为按照本发明的变形机器人图26所示实施例中腿部结构的第二连接架的立体结构示意图。
65.图30为按照本发明的变形机器人图26所示实施例中腿部结构的第二连接臂的立体结构示意图。
66.图31为按照本发明的变形机器人图26所示实施例中腿部结构的第一连接座的立体结构示意图。
67.图32为按照本发明的变形机器人图26所示实施例中腿部结构的第一车轮的立体结构示意图。
68.图33为按照本发明的变形机器人图26所示实施例中腿部结构的第二车轮的立体结构示意图。
69.图34为按照本发明的变形机器人图1所示实施例中的手臂结构一优选实施例的立体结构示意图。
70.图35为按照本发明的变形机器人图34所示实施例中手臂结构的主视结构示意图。
71.图36为按照本发明的变形机器人图34所示实施例中手臂结构的后视结构示意图。
72.图37为按照本发明的变形机器人图34所示实施例中的不带有造型件的手臂结构的立体结构示意图。
73.图38为按照本发明的变形机器人图34所示实施例中的手臂结构变形后的立体结构示意图。
74.图39为按照本发明的变形机器人图37所示实施例中的变形后的手臂结构的立体结构示意图。
75.图40为按照本发明的变形机器人图34所示实施例中的手臂结构的立体装配图。
76.图41为按照本发明的变形机器人图37所示实施例中的手臂结构的立体装配图。
77.图42为按照本发明的变形机器人图1所示实施中的变形机器人的变形状态示意图1。
78.图43为按照本发明的变形机器人图3所示实施中的变形机器人的变形状态示意图2。
具体实施方式
79.下面结合附图对本发明的优选实施例作进一步阐述说明;
80.在本实施例的描述中需要理解的是,术语“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
81.需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
82.实施例1:
83.如图1-43所示,公开了本发明的一优选实施例的一种变形机器人。图1示出了本实施例中的带有外部造型件的变形机器人的立体结构示意图。图2示出了图1变形机器人变形后的立体结构示意图。图3示出了图1所示实施例不带有外部造型件的立体结构示意图。该变形机器人包括,固定的安装在胸腔结构上的手臂结构、腿部结构及机器人头部1。所述手臂结构包括左手臂2和右手臂3。左手臂2和右手臂3互为镜像结构且对称的安装在所述胸腔结构的上部两侧。所述腿部结构包括左腿部4和右腿部5。左腿部4和右腿部5互为镜像结构且对称的安装在所述胸腔结构的下部两侧。图4示出了本实施例中的变形机器人的胸腔结构的立体结构示意图。机器人头部1设置在所述胸腔结构的顶部。图5示出了图4所示实施例中的所述胸腔结构变形后的立体结构示意图。图6示出了图4所示实施例中胸腔结构不带有外部造型件的立体结构示意图1。图7示出了图4所示实施例中胸腔结构不带有外部造型件的立体结构示意图2。在本实施例中,所述胸腔结构,包括固定安装在第二固定架6上部的第一舵机7。在第二固定架6上固定安装有第二电池69。第一舵机7的转动输出轴依次穿过所述第二固定架6的顶壁、第一垫板8与固定安装在第一转动架9上的第一舵盘10固定连接。在本实施例中,在第一转动架9上固定设置有多个连接凸台71。在第一舵盘10上设置有与连接凸台71相互对应的套筒。所述套筒套装在连接凸台71上。第一舵盘10具有圆弧形的限位开口11。第一垫板8上的限位柱12活动地穿过限位开口11。第一舵机7的转动输出轴转动带动第一转动架9转动继而实现带动整个所述胸腔结构和安装在所述胸腔结构上的机器人头部1、左手臂2及右手臂3转动。在限位柱12上设置有轴向通孔20。轴向通孔20的设置便于第一舵机7的连接线通过。
84.在第一转动架9的上部固定安装有第一连接架13。在第一连接架13的上部固定安装有第一固定架14。第一连接架13具有水平凸出的凸出板72。在第一固定架14的后端顶部铰接有翻板15。翻板15通过转轴可翻转地铰接在第一固定架14的后端顶部位置。机器人头部1可拆卸地固定安装在翻板15上。在本实施例中,在第一固定架14的后端底部固定安装有第二舵机16。在本实施例中,第一固定架14的尾部设置有凸出部70。第一固定架14和凸出部70为一体式结构。第二舵机16的顶部与凸出部70固定连接,第二舵机16的底部与凸出板72
固定连接。第二舵机16的转动输出轴上固定套装有第一驱动连杆17。第一驱动连杆17的一端与第二舵机16的转动输出轴固定连接,另一端铰接有第二驱动连杆18。第二驱动连杆18的一端与第一驱动连杆17的一端固定铰接,另一端与翻板15的底部固定铰接。第二舵机16的转动输出轴转动依次带动第一驱动连杆17、第二驱动连杆18运动继而实现带动翻板15沿着所述转轴翻转实现机器人头部1从第一固定架14内伸出或缩回。在本实施例中,翻板15尾部垂直地固定安装有立板19。立板19随着翻板15的运动活动地扣接在第一固定架14的顶部开口上。
85.在第二固定架6的底部固定安装有第三舵机21。第三舵机21具有转动输出轴和设置在第三舵机21壳体上的支撑轴。所述第三舵机的支撑轴与第三舵机的转动输出轴的轴心重合且对称设置。第三舵机21的转动输出轴穿过第二固定架6的任一侧与第二连接架22的任一侧壁固定连接。第三舵机21的支撑轴穿过第二固定架6的另一侧与第二连接架22的另一侧壁固定连接。第二连接架22的一侧与所述腿部结构中的任一第四舵机23固定连接,另一侧与所述腿部结构中的另一第四舵机23固定连接。在第四舵机23上转动地安装有第三车轮 24。第三车轮24通过连接轴可转动的固定第四舵机23的侧壁上。作为另一种替代方案,第四舵机23的侧壁上安装有连板76。在连板76上固定安装有连接轴75。在连接轴75上可转动的套装有轴承73。第三车轮24通过所述轴承73转动地安装在连接轴75上。
86.第四舵机23具有转动输出轴和支撑轴。第四舵机23的转动输出轴通过舵盘与第一连接臂68的一端固定连接。第四舵机23的支撑轴插入在第二连接臂25的一端上的连接孔内。第一连接臂68的另一端与第一连接座26的一侧顶部固定连接。第二连接臂25的另一端与第一连接座26的另一侧顶部固定连接。在本实施例中,第一连接座26具有双叉臂结构。第一连接座26上的任一插臂27通过舵盘与第五舵机74的转动输出轴固定连接、另一插臂27 套装在第五舵机27的支撑轴上。同样,第五舵机74的转动输出轴和第五舵机74的支撑轴的轴心重合且对称设置。在第五舵机74的底部固定连接有第六舵机28。第六舵机28具有转动输出轴和与所述转动输出轴相互对应的支撑轴。第六舵机28的转动输出轴通过舵盘与第二连接架22的一端的任一侧固定连接。第六舵机28的支撑轴通过舵盘与第二连接架22 的一端的另一侧固定连接。第二连接架22的另一端固定连接有第七舵机29。同样,第七舵机29的转动输出轴和第七舵机29的支撑轴的轴心重合且对称设置。第七舵机29的转动输出轴通过舵盘与第二连接架22的另一端的任一侧固定连接。第七舵机29的支撑轴通过舵盘与第二连接架22的另一端的另一侧固定连接。
87.在第二连接架22内固定安装有第八舵机30。具体是,第八舵机30通过支撑架42固定安装在第二连接架22的安装槽内。第八舵机30的转动输出轴穿过第二连接架22的任一侧侧壁与马达齿31固定连接。马达齿31一方面通过第一从动齿轮32与第一车轮33上的第二从动齿轮34活动啮合,另一方面通过第三从动齿轮35与第二车轮36上的第四从动齿轮 37活动啮合。第八舵机30同时带动第一车轮33和第二车轮36转动。在本实施例中,第一车轮33、第二车轮36及第三车轮24同时处于第二连接架22的任一侧。换言之,第一车轮33、第二车轮36及第三车轮24同时处于第二连接架22的左侧或右侧。第一从动齿轮32 通过第一连接杆38转动地固定安装在第二连接架22任一侧的所述侧壁上。第三从动齿轮 35通过第二连接杆39转动地固定安装在所述侧壁上。第一车轮33通过第三连接杆40转动地固定安装在所述侧壁上。第二车轮36通过第四连接杆41转动地固定安装在所述侧壁上。第一连接杆38、第二
连接杆39、第三连接杆40及所述第四连接杆41间隔且平行的设置在第二连接架22的侧壁上。第三连接杆40和第四连接杆41同处于一条直线上。
88.在第七舵机29的底部十字交叉的固定连接有第九舵机43。第九舵机43具有支撑轴。第九舵机43的转动输出轴通过舵盘与第二连接座44的任一侧筋板固定连接。第九舵机43 的支撑轴通过舵盘与第二连接座44的另一侧筋板固定连接。第二连接座44通过第九舵机 43的作用可实现转动。第二连接座44的底部可拆卸地连接有脚部连接板45。
89.第一连接架13的一端底部与所述手臂结构中的左手臂2的任一第十舵机46固定连接,另一端底部与所述手臂结构中的右手臂3的另一第十舵机46固定连接。或者是,第一连接架13的一端底部与所述手臂结构中的右手臂3的任一第十舵机46固定连接,另一端底部与所述手臂结构中的左手臂2的另一第十舵机46固定连接。左手臂2和右手臂结构相同。两个所述第十舵机46同时处于第一连接架13和第一转动架9之间。在第一转动架9的顶部通过多个连接柱62固定安装有pcb电路板63。在pcb电路板63安装有控制器。第一舵盘10 通过其连接部64上的连接孔65固定套装在第一舵机7的转动输出轴上。在第一固定架14 的后端底部固定安装有第一电池66。第一电池66第一舵机7上通过连接板固定安装有喇叭 67。每一个第十舵机46的转动输出轴均通过舵盘固定连接有一个第十六舵机47。所述手臂结构,还包括固定安装在第一安装座48上的第十二舵机49。第十二舵机49的转动输出轴与第一安装座48一端上的第一安装板50固定连接。第十二舵机49通过其上的转动输出轴转动地铰接在第一安装板50上。在第十二舵机49的壳体上固定安装有手掌部51。
90.第一安装座48的另一端具有安装槽52。在安装槽52内固定卡接有第十三舵机53。第十三舵机具有支撑轴。第十三舵机53的转动输出轴通过舵盘与任一第三连接臂54的一端固定连接。第十三舵机53的支撑轴通过舵盘与另一第三连接臂54的一端固定连接。任一第三连接臂54的另一端与第一连接板55的一侧固定连接,另一第三连接臂54的另一端与第一连接板55的另一侧固定连接。在第一连接板55上固定安装有第十四舵机56。在第十四舵机56的转动输出轴上固定安装有第三固定架57。在第三固定架57上固定安装有第十五舵机58。在第十五舵机58的转动输出轴上固定安装有第三连接架59。第三连接架59具有两个间隔设置的第四连接臂60。任一第四连接臂60与第十六舵机47的转动输出轴固定连接,另一第四连接臂60套装在第十六舵机47的支撑柱上。在本实施例中,还包括第二安装板 61。第一安装板50平行于第二安装板61。第二安装板61的一端可拆卸地扣装在安装槽52 的顶部,另一端套装在第十二舵机49的支撑轴上。第十二舵机49通过其自身的转动输出轴可翻转地置于第一安装板50与第二安装板61之间形成的间隙内实现对手掌部51的翻转。各个舵机通过线路与所述控制器电性连接。所述控制器控制各个所述舵机运动。
91.以上所述仅是本发明的优选实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
92.阅读了本说明书后,本领域技术人员不难看出,本发明由现有技术的结合构成,这些构成发明的各部分的现有技术有些在此给予了详细描述,有些则出于说明书简明考虑并未事无巨细地赘述,但本领域技术人员阅读了说明书后便知所云。而且本领域技术人员也不难看出,为构成本发明而对这些现有技术的结合是饱含大量创造性劳动,是发明人多年理论分析和大量实验的结晶。本领域技术人员同样可以从说明书中看出,这里所披露的每
个技术方案以及各个特征的任意组合都属于本发明的一部分。