1.本发明涉及平衡训练系统、其控制方法及控制程序。
背景技术:
2.日本特许第6260811号公报所公开的康复支持装置具备:受力板,能够供被检者站立;载荷检测传感器,检测被检者施加于受力板的载荷;重心位置检测单元,根据由载荷检测传感器检测出的载荷来检测被检者的重心位置;及驱动单元。在此,驱动单元使受力板与被检者的重心的移动方向对应地移动。
技术实现要素:
3.在相关技术中,存在如下课题:在需要支持的被检者(训练者)因听力丧失或高级脑功能障碍等而难以接受来自辅助者的声音的支持的情况下,该被检者无法进行有效的平衡训练。
4.本发明是鉴于以上背景而完成的,其目的在于提供一种即使在训练者难以接受来自辅助者的声音的支持的情况下也能够进行有效的训练的平衡训练系统、其控制方法及控制程序。
5.本发明一个实施方式所涉及的平衡训练系统包括:载荷检测部,具有对站立状态的训练者的脚掌进行支承的载置面,检测从搭乘于所述载置面的所述训练者受到的载荷;移动体,安装有所述载荷检测部;控制部,基于由所述载荷检测部检测出的载荷来计算所述训练者的重心位置,并且基于所述重心位置的变化来控制所述移动体的移动;及振动器,设置为能够对所述训练者施加振动,所述控制部使所述振动器振动,从而促使所述训练者将所述重心位置从当前位置向期望的位置移动。在该平衡训练系统中,即使在训练者由于听力丧失或高级脑功能障碍等而难以接受来自辅助者的声音的支持的情况下,也能够接受基于振动器的振动的支持。因此,训练者能够实施有效的平衡训练。
6.优选为,所述重心位置的所述当前位置与所述期望的位置之间的差越大,则所述控制部使所述振动器的振动越大。由此,训练者能够根据振动器的振动的大小知晓应该使重心移动何种程度。
7.优选为,所述控制部对与从所述重心位置的所述当前位置向所述期望的位置的朝向相应的所述训练者的部位施加所述振动器的振动。更具体而言,优选为,所述控制部对根据从所述重心位置的所述当前位置向所述期望的位置的朝向而决定的所述训练者的脚的脚尖和脚后跟中的任一处施加所述振动器的振动。由此,训练者能够根据被施加了振动器的振动的部位知晓应该使重心向哪个方向移动。
8.所述振动器设置于所述载荷检测部的下侧。由此,载荷检测部能够防止由振动器的载荷引起的误检测。或者,所述振动器安装于所述训练者的规定部位。由此,训练者能够更准确地接收振动器的振动。
9.本发明的一个实施方式所涉及的平衡训练系统的控制方法包括:使用具有对站立状态的训练者的脚掌进行支承的载置面的载荷检测部,来检测从搭乘于所述载置面的所述训练者受到的载荷的步骤;及基于由所述载荷检测部检测出的载荷来计算所述训练者的重心位置,并且基于所述重心位置的变化来控制安装有所述载荷检测部的移动体的移动的步骤,在控制所述移动体的移动的步骤中,使振动器振动,从而促使所述训练者将所述重心位置从当前位置向期望的位置移动。在该平衡训练系统的控制方法中,即使在训练者由于听力丧失或高级脑功能障碍等而难以接受来自辅助者的声音的支持的情况下,也能够接受基于振动器的振动的支持。因此,训练者能够实施有效的平衡训练。
10.本发明的一个实施方式所涉及的控制程序使计算机执行如下处理:使用具有对站立状态的训练者的脚掌进行支承的载置面的载荷检测部,来检测从搭乘于所述载置面的所述训练者受到的载荷的处理;及基于由所述载荷检测部检测出的载荷来计算所述训练者的重心位置,并且基于所述重心位置的变化来控制安装有所述载荷检测部的移动体的移动的处理,在控制所述移动体的移动的处理中,使振动器振动,从而促使所述训练者将所述重心位置从当前位置向期望的位置移动。在该控制程序中,即使在训练者由于听力丧失或高级脑功能障碍等而难以接受来自辅助者的声音的支持的情况下,也能够接受基于振动器的振动的支持。因此,训练者能够实施有效的平衡训练。
11.根据本发明,能够提供一种即使在训练者难以接受来自辅助者的声音的支持的情况下也能够进行有效的平衡训练的平衡训练系统、其控制方法及控制程序。
12.本公开的上述和其它目的、特征和优点将从下文给出的详细说明以及附图得到更充分的理解,详细说明和附图仅仅是为了说明的目的而给出的,因此不应将它们看作是对本公开的限制。
附图说明
13.图1是实施方式1所涉及的平衡训练系统的概略立体图。
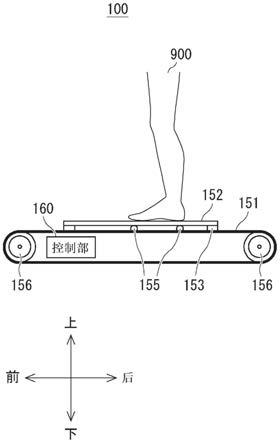
14.图2是图1所示的平衡训练系统的一部分的概略侧视图。
15.图3是用于说明图1所示的平衡训练系统的动作的图。
16.图4是用于说明图1所示的平衡训练系统的动作的图。
17.图5是表示图1所示的平衡训练系统的第一变形例的概略侧视图。
18.图6是用于说明图5所示的平衡训练系统的动作的图。
19.图7是用于说明图5所示的平衡训练系统的动作的图。
20.图8是表示图1所示的平衡训练系统的第二变形例的概略侧视图。
21.图9是实施方式2所涉及的平衡训练系统的概略立体图。
22.图10是图9所示的平衡训练系统的一部分的概略侧视图。
23.图11是表示图9所示的平衡训练系统的变形例的概略侧视图。
具体实施方式
24.以下,通过发明的实施方式对本发明进行说明,但并不将权利要求书所涉及的发明限定于以下的实施方式。另外,在实施方式中说明的全部结构并不一定都是作为用于解决课题的手段而必须的。为了明确说明,以下的记载和附图被适当地省略和简化。在各附图
中,对相同的要素标注相同的标号,并根据需要省略重复说明。
25.<实施方式1>
26.图1是实施方式1所涉及的平衡训练系统100的概略立体图(从左斜后方观察到的图)。图2是平衡训练系统100的一部分的概略侧视图(从左侧观察到的图)。平衡训练系统100也可以称为平衡训练装置。
27.平衡训练系统100是用于使具有偏瘫等损伤的训练者学会步行所需的重心移动、或使踝关节具有损伤的训练者恢复踝关节功能的系统。例如,希望恢复踝关节功能的训练者900一边取得平衡一边持续搭乘于平衡训练系统100,由此平衡训练系统100能够对训练者900的踝关节施加能够期待康复效果的程度的载荷。
28.具体而言,平衡训练系统100具备跑步机150、搭乘板152、载荷传感器153、振动器155、控制器160和扶手170。由搭乘板152和载荷传感器153构成了载荷检测部。另外,以下说明中的上下方向、左右方向、前后方向是以训练者900的朝向为基准的方向。
29.跑步机150至少具备环状的带(移动体)151、滑轮156及未图示的电动机。另外,在带151上载置有由载荷传感器153及搭乘板152构成的载荷检测部和振动器155。
30.搭乘板152是供训练者900搭乘的搭乘部,具有对站立状态的训练者900的脚掌进行支承的载置面。搭乘板152使用耐受训练者900的搭乘的刚性较高的例如聚碳酸酯树脂制的矩形平板。搭乘板152经由配置于四角的载荷传感器153支承于带151的上表面。
31.载荷传感器153例如是测力传感器,检测从站立于搭乘板152的训练者900的脚受到的载荷。载荷传感器153配置于搭乘板152的四角,对搭乘板152进行支承。
32.扶手170设置成例如位于训练者900的侧面,以使训练者900能够在要失去平衡时或感到不安时进行抓握。
33.控制部160根据由载荷传感器153检测出的载荷来计算训练者900的重心位置,并且基于计算出的重心位置的移动矢量(移动方向及移动量)来使滑轮156旋转,由此使环状的带151旋转。随着带151的旋转(移动),站立在带151之上的训练者900也移动。
34.另外,控制部160还控制振动器155的振动。振动器155例如安装于搭乘板152的下侧的规定位置,以使振动传递到站立于搭乘板152的训练者900的脚掌。通过将振动器155设置于搭乘板152的下侧,与载置的情况不同,载荷检测部能够防止由振动器155的载荷引起的误检测。
35.控制部160使振动器155振动,从而促使训练者900将重心位置从当前位置移动到期望的位置(换言之,基于从重心的当前位置到期望的位置为止的移动向量)。由此,训练者900能够进行一边从脚掌受到基于振动器155的振动的支持,一边使重心移动到期望的位置的训练。
36.这样,在平衡训练系统100中,即使在训练者900由于听力丧失或高级脑功能障碍等而难以接受来自辅助者的声音的支持的情况下,也能够接受基于振动器155的振动的支持。因此,训练者900能够实施有效的平衡训练。
37.(平衡训练系统100的动作)
38.接着,使用图3及图4说明平衡训练系统100的动作。
39.图3和图4是用于说明平衡训练系统100的动作的图。
40.另外,在图3和图4的例子中,振动器155由4个振动器155fr、155fl、155br、155bl构
成。振动器155fr配置于训练者900的右脚掌的前方(脚尖部分),振动器155fl配置于训练者900的左脚掌的前方(脚尖部分),振动器155br配置于训练者900的右脚掌的后方(脚后跟部分),振动器155bl配置于训练者900的左脚掌的后方(脚后跟部分)。
41.训练者900在训练开始前,使脚底与带151的中央部的任意位置接触而成为静止站立状态,当训练开始时,进行通过一边使脚底不从接触的位置移动一边尝试重心移动来取得平衡的训练。
42.控制部160在训练开始前计算训练者900在静止站立状态下的重心位置cp0。具体而言,控制部160根据由配置于矩形的搭乘板152的四角的载荷传感器153检测出的、从训练者900的左右脚ft受到的载荷,来计算训练者900的初始的重心位置cp0。另外,此时,控制部160按照训练者900的训练水平来规定期待的重心位置cpx作为移动目的地。
43.当训练开始时,控制部160定期地计算平衡训练过程中的训练者900的重心位置cp1。在图3的例子中,训练者900在平衡训练过程中维持静止站立状态的姿势。因此,重心位置cp1未从初始的重心位置cp0发生变化。
44.此时,控制部160使振动器155振动,从而促使训练者900将重心位置cp1从初始的重心位置cp0移动到期望的重心位置cpx。在图3的例子中,重心位置cpx位于重心位置cp0的前方。因此,控制部160使振动器155fr、155fl振动(即,对训练者900的两脚的脚尖部分施加振动)。由此,训练者900能够知晓接受到使重心位置cp1向前方移动的指示。即,训练者900能够一边接受基于振动器的振动的支持一边实施平衡训练。
45.另外,控制部160在想要给予使训练者900的重心位置cp1向右斜前方移动的意思的指示的情况下,使振动器155fr振动(即,对训练者900的右脚的脚尖施加振动)。另外,控制部160在想要给予使训练者900的重心位置cp1向左斜前方移动的意思的指示的情况下,使振动器155fl振动(即,对训练者900的左脚的脚尖施加振动)。另外,控制部160在想要给予使训练者900的重心位置cp1向右斜后方移动的意思的指示的情况下,使振动器155br振动(即,对训练者900的右脚的脚后跟施加振动)。另外,控制部160在想要给予使训练者900的重心位置cp1向左斜后方移动的意思的指示的情况下,使振动器155bl振动(即,对训练者900的左脚的脚后跟施加振动)。由此,训练者900能够根据被施加了振动器155的振动的部位知晓应该使重心向哪个方向移动。
46.此外,训练者900的当前的重心位置cp1与期望的重心位置cpx之间的差越大,则控制部160使振动器155(在本例中为振动器155fr、155fl)的振动越大。由此,训练者900能够根据振动器155的振动的大小知晓应该使重心移动何种程度。
47.另外,在本例中,控制部160在给予使训练者900的重心位置cp1向前方移动的意思的指示时,使振动器155fr、155fl振动,但并不限于此。控制部160例如也可以使设置于不希望重心移向的朝向的振动器(在本例中为振动器155br、155bl)振动。
48.当训练者900如指示那样使重心位置cp1移动至重心位置cpx时,控制部160根据重心位置cp1的移动矢量(图4中的实线的箭头;在本例中是从重心位置cp0到重心位置cpx为止的移动矢量)使带151旋转。随着带151的旋转,站立在带151之上的训练者900也移动。另外,在本例中,带151仅能够在前后方向上旋转。
49.图4所示的x轴表示以搭乘板152的后方的端部为起点的情况下的重心的前后方向的位置。在图4的例子中,重心位置cp0的x轴方向的位置是位置x0,重心位置cp1的x轴方向
的位置是位置x1。控制部160根据位置x1与位置x0之间的差量来使带151向前方或后方旋转。在图4的例子中,控制部160根据位置x1与位置x0之间的差量来使带151向前方旋转。
50.这样,在平衡训练系统100中,即使在训练者900由于听力丧失或高级脑功能障碍等而难以接受来自辅助者的声音的支持的情况下,也能够接受基于振动器155的振动的支持。因此,训练者900能够实施有效的平衡训练。
51.(平衡训练系统100的第一变形例)
52.图5是将平衡训练系统100的第一变形例表示为平衡训练系统100a的概略侧视图。
53.在平衡训练系统100a中,载荷检测部不是由搭乘板152和载荷传感器153构成,而是由载荷分布传感器154构成。以下,具体地进行说明。
54.载荷分布传感器154由多个传感器构成,该多个传感器呈矩阵状配置于对站立状态的训练者900的脚掌进行支承的载置面。载荷分布传感器154通过使用多个传感器,能够检测出从训练者900的脚受到的表面压力的分布。因此,载荷分布传感器154当然也能够检测出从训练者900受到的载荷。
55.振动器155例如安装于载荷分布传感器154的下侧的规定位置,从而使振动传递到站立于载荷分布传感器154的载置面的训练者900的脚掌。
56.控制部160使振动器155振动,从而促使训练者900将重心位置从当前位置向期望的位置移动。由此,训练者900能够进行一边从脚掌受到基于振动器155的振动的支持,一边使重心向期望的位置移动的训练。
57.图6和图7是用于说明平衡训练系统100a的动作的图。图6和图7分别对应于图3和图4。平衡训练系统100a的其他构造及动作与平衡训练系统100的情况相同,因此省略其说明。
58.这样,即使是平衡训练系统100a,也能够起到与平衡训练系统100的情况同等程度的效果。
59.(平衡训练系统100的第二变形例)
60.图8是将平衡训练系统100的第二变形例表示为平衡训练系统100b的概略侧视图。
61.在平衡训练系统100b中,与平衡训练系统100a相比,载荷分布传感器154配置于环状的带151的内侧(训练者900搭乘的面的带151的下侧)。
62.振动器155例如安装于搭乘板152的下侧的规定位置,从而使振动经由带151传递到站立于搭乘板152的训练者900的脚掌。
63.控制部160使振动器155振动,从而促使训练者900将重心位置从当前位置向期望的位置移动。由此,训练者900能够进行一边从脚掌受到基于振动器155的振动的支持,一边使重心向期望的位置移动的训练。
64.平衡训练系统100b的其他构造及动作与平衡训练系统100的情况相同,因此省略其说明。
65.这样,即使是平衡训练系统100b,也能够起到与平衡训练系统100的情况同等程度的效果。
66.<实施方式2>
67.图9是实施方式2所涉及的平衡训练系统200的概略立体图(从左斜后方观察到的图)。图10是平衡训练系统200的一部分的概略侧视图(从左侧观察到的图)。平衡训练系统
200也可以称为平衡训练装置。
68.平衡训练系统200具备移动台车(移动体)250、搭乘板252、载荷传感器253、振动器255、控制部260、扶手270。由搭乘板252和载荷传感器253构成了载荷检测部。搭乘板252、载荷传感器253、振动器255、控制部260及扶手270分别对应于搭乘板152、载荷传感器153、振动器155、控制部160及扶手170。另外,以下说明中的上下方向、左右方向、前后方向是以训练者900的朝向为基准的方向。
69.移动台车250构成为能够以康复设施的地面等作为移动面而在该移动面上沿前后方向移动。另外,在移动台车250上载置有由载荷传感器253及搭乘板252构成的载荷检测部和振动器255。
70.搭乘板252是供训练者900搭乘的搭乘部,具有对站立状态的训练者900的脚掌进行支承的载置面。搭乘板252使用耐受训练者900搭乘的刚性较高的例如聚碳酸酯树脂制的矩形平板。搭乘板252经由配置于四角的载荷传感器253支承于移动台车250的上表面。
71.载荷传感器253例如是测力传感器,检测从站立于搭乘板252的训练者900的脚受到的载荷。载荷传感器253配置于搭乘板252的四角,对搭乘板252进行支承。
72.扶手270设置成例如位于训练者900的侧面,以使训练者900能够在要失去平衡时或感到不安时进行抓握。
73.控制部260根据由载荷传感器253检测出的载荷来计算训练者900的重心位置,并且使车轮256以与计算出的重心位置的移动矢量(移动方向及移动量)对应的速度、方向及量旋转,由此使移动台车250移动。随着移动台车250的移动,站立在移动台车250之上的训练者900也移动。
74.另外,控制部260还进行振动器255的振动的控制。振动器255例如安装于搭乘板252的下侧的规定位置,从而使振动传递到站立于搭乘板252的训练者900的脚掌。通过将振动器255设置于搭乘板252的下侧,与载置的情况不同,载荷检测部能够防止由振动器255的载荷引起的误检测。
75.控制部260使振动器255振动,从而促使训练者900将重心位置从当前位置向期望的位置移动(换言之,基于从重心的当前位置到期望的位置为止的移动向量)。由此,训练者900能够进行一边从脚掌受到基于振动器255的振动的支持,一边使重心向期望的位置移动的训练。
76.这样,在平衡训练系统200中,即使在训练者900由于听力丧失或高级脑功能障碍等而难以接受来自辅助者的声音的支持的情况下,也能够接受基于振动器255的振动的支持。因此,训练者900能够实施有效的平衡训练。
77.(平衡训练系统200的变形例)
78.图11是将平衡训练系统200的变形例表示为平衡训练系统200a的概略侧视图。
79.在平衡训练系统200a中,载荷检测部不是由搭乘板252和载荷传感器253构成,而是由载荷分布传感器254构成。以下,具体地进行说明。
80.载荷分布传感器254由多个传感器构成,该多个传感器呈矩阵状配置于对站立状态的训练者900的脚掌进行支承的载置面。载荷分布传感器254通过使用多个传感器,能够检测出从训练者900的脚受到的表面压力的分布。因此,载荷分布传感器254当然也能够检测出从训练者900受到的载荷。
81.振动器255例如安装于载荷分布传感器254的下侧的规定位置,从而使振动传递到站立于载荷分布传感器254的载置面的训练者900的脚掌。
82.控制部260使振动器255振动,从而促使训练者900将重心位置从当前位置移动到期望的位置。由此,训练者900能够进行一边从脚掌受到基于振动器255的振动的支持,一边使重心向期望的位置移动的训练。
83.平衡训练系统200a的其他构造及动作与平衡训练系统200的情况相同,因此省略其说明。
84.这样,即使是平衡训练系统200a,也能够起到与平衡训练系统200的情况同等程度的效果。
85.另外,本发明并不限于上述实施方式1、2,能够在不脱离主旨的范围内适当地变更。
86.在实施方式1中,以振动器155设置于载荷检测部的下侧的情况为例进行了说明,但并不限于此。振动器155例如也可以安装于训练者900的规定部位(例如,双脚各自的脚尖和脚后跟部分)。由此,训练者900能够更准确地接收振动器155的振动。
87.同样地,在实施方式2中,以振动器255设置于载荷检测部的下侧的情况为例进行了说明,但并不限于此。振动器255例如也可以安装于训练者900的规定部位(例如,双脚各自的脚尖和脚后跟部分)。由此,训练者900能够更准确地接收振动器255的振动。
88.另外,在实施方式1中,以控制部160根据重心位置cp1的移动矢量使带151在前后方向上旋转的情况为例进行了说明,但并不限于此。如果带151构成为不仅能够在前后方向上旋转而且还能够在左右方向上旋转,则控制部160能够根据重心位置cp1的移动向量使带151向前后左右旋转。
89.同样地,在实施方式2中,以控制部260根据重心位置cp1的移动矢量使移动台车250在前后方向上移动的情况为例进行了说明,但并不限于此。如果移动台车250构成为不仅能够在前后方向上移动而且还能够在左右方向上移动,则控制部260能够根据重心位置cp1的移动矢量使移动台车250向前后左右移动。
90.另外,在实施方式1中,以控制部160内置于跑步机150的情况为例进行了说明,但并不限于此。控制部160也可以设置于跑步机150的外部,而且还可以构成为能够远程操作跑步机150。同样地,在实施方式2中,以控制部260内置于移动台车250的情况为例进行了说明,但并不限于此。控制部260也可以设置于移动台车250的外部,而且还可以构成为能够远程操作移动台车250。
91.而且,在上述实施例中,将本公开说明为硬件的结构,但本公开并不限定于此。本公开能够通过使cpu(central processing unit:中央处理单元)执行计算机程序来实现平衡训练系统的控制处理。
92.此外,上述的程序可以使用各种类型的非暂时性计算机可读介质(non-transitory computer readable medium)来存放,并提供给计算机。非暂时性计算机可读介质包括各种类型的有实体的记录介质(tangible storage medium)。非暂时性计算机可读介质例如包括磁记录介质、光磁记录介质、cd-rom(read only memory:只读存储器)、cd-r、cd-r/w、半导体存储器。磁记录介质例如是软盘、磁带、硬盘驱动器等。光磁记录介质例如是光磁盘等。半导体存储器例如是掩模rom、prom(programmable rom:可编程rom)、eprom
(erasable prom:可擦除prom)、闪存rom、ram(random access memory:随机存取存储器)等。另外,程序也可以由各种类型的暂时性计算机可读介质(transitory computer readable medium)提供给计算机。暂时性计算机可读介质的例子包括电信号、光信号和电磁波。暂时性计算机可读介质可以通过电线和光纤等有线通信路径或者通过无线通信路径,将程序提供给计算机。
93.从所描述的公开内容中,显而易见的是,本公开的实施例可以以多种方式改变。这种改变不应被认为是脱离了本公开的主旨和范围,并且对于本领域的技术人员而言显而易见的是,所有这些改变都旨在包括在所附权利要求的范围内。