1.本发明属于民航专用设备技术领域,特别是涉及一种飞机备用罗盘校验教学平台。
背景技术:
2.在现实生活中,因为飞机上安装有钢铁构件与其他各种电子电气设备部件,因此会形成磁场的干扰作用,使得飞机备用罗盘的磁场测量精度降低,所以飞机备用罗盘需要人工进行定期的校验和调节,使其能够满足适航要求。此外,在航空磁测过程中,飞机磁干扰将随着航行偏向和飞机航行姿态的变化而改变,这将影响航空磁测的观测结果,尤其对于高精度航空磁测而言更严重。
3.在教学研究过程中,学生及相关研究人员关于飞机备用罗盘的使用与校验的工作原理及操作过程处于较为理想的理论阶段,不能很好地将理论知识与实际情况相结合。而在飞机罗盘校验相关的检测与维修实践课程中,一方面由于飞机备用罗盘中的调节部件较多,造成机械误差较大,同时其重复操作性不佳,频繁操作会造成航材件损伤、内部的部件损坏、失效;另一方面是教学研究时不能模拟多自由度偏航情况进行航空磁测,具有一定的抽象性和盲目性。
技术实现要素:
4.为了解决上述问题,本发明的目的在于提供一种飞机备用罗盘校验教学平台。
5.为了达到上述目的,本发明提供的飞机备用罗盘校验教学平台包括三自由度模拟偏航载体平台、飞机备用罗盘和校验设备;其中,三自由度模拟偏航载体平台包括三自由度偏航驱动装置和等比例飞机机体模型;等比例飞机机体模型固定在三自由度偏航驱动装置的顶部,上端设有飞机备用罗盘放置槽和校验设备放置槽,分别用于设置飞机备用罗盘和校验设备,并且飞机备用罗盘和校验设备位于同一高度。
6.所述等比例飞机机体模型上还安装有人工附加磁场装置;人工附加磁场装置包括软铁磁场装置和硬铁磁场装置,用于产生人工附加的外部磁场干扰。
7.所述飞机备用罗盘包括第一壳体、备用罗盘电子显示器、传感器安装调节旋钮、n-s旋钮、e-w旋钮以及设置在第一壳体内部的第一充电电池、罗差修正卡、高精度磁传感器装置、磁抗干扰装置、树莓派装置、第一印刷电路板、水平隔板、垂直隔板、第一电源开关组件、第一电源补给接入模块和第一电源转换电路模块;其中:第一壳体为由前面板、后面板、两个侧面板、上面板和下面板构成的长方形箱体结构;其中一个侧面板的外部设有第一电源开关组件和第一电源补给接入模块,分别用于飞机备用罗盘的启停和充电;上面板上安装有备用罗盘电子显示屏,用来反馈当前环境下高精度磁传感器装置校准前后的测量数据信息;传感器安装调节旋钮、n-s旋钮和e-w旋钮也安装在上面板上;下面板的顶面中部设有垂直隔板;高精度磁传感器装置和磁抗干扰装置安装在垂直隔板的一侧,第一充电电池和第一电源转换电路模块安装在垂直隔板的另一侧;树莓派装置、第一印刷电路板、罗差修正卡
和水平隔板从上至下利用电路板支柱间隔设置在垂直隔板的上侧;第一印刷电路板上安装有微处理器模块和第一控制电路模块;其中:微处理器电路模块分别与高精度传感器装置、第一控制电路模块、第一充电电池、树莓派装置相连接;第一控制电路模块同时与传感器安装调节旋钮、n-s旋钮、e-w旋钮、备用罗盘电子显示器、树莓派装置和第一电源转换电路模块相连接;第一电源转换电路模块同时与第一充电电池、备用罗盘电子显示器、树莓派装置和第一电源补给接入模块相连接,高精度磁传感器装置与磁抗干扰装置相连接;罗差修正卡与备用罗盘电子显示器相连接。
8.所述水平隔板、垂直隔板均采用无磁材料制成。
9.所述三自由度偏航驱动装置包括第二壳体、三自由度模拟偏航工作台、偏航状态控制电子显示屏、偏航控制按键以及设置在第二壳体内部的可活动万向节、步进电机、第二印刷电路板、速度传感器、角度传感器、第二电源转换电路模块、第二充电电池、陀螺地平仪、中继圆台、第二电源开关组件和第二电源补给接入模块;其中:第二壳体为由前面板、后面板、两个侧面板、上面板和下面板构成的长方形箱体结构;前面板上安装有偏航状态控制电子显示屏以及多个偏航控制按键,用来显示和控制当前等比例飞机机体模型的偏航状态;上面板中部形成有一圆形开口;其中一个侧面板的外部设有第二电源开关组件和第二电源补给接入模块;步进电机的下端固定在下面板的顶面中部,输出轴朝上且与中继圆台的底面中部相连接;四根可活动万向节的下端间隔安装在中继圆台的顶面上,上部从上面板上的圆形开口向上伸出;三自由度模拟偏航工作台的底面同时连接在四根可活动万向节的上端;等比例飞机机体模型的底面利用三根支撑支柱固定在三自由度模拟偏航工作台的顶面上;角度传感器、速度传感器和陀螺地平仪安装在中继圆台的顶面上;步进电机的外侧安装有第二印刷电路板、单片机装置、第二电源转换电路模块和第二充电电池;第二印刷电路板上设有第二控制电路模块和驱动电路模块;单片机装置分别与第二控制电路模块、驱动电路模块、角度传感器、速度传感器、陀螺地平仪、可活动万向节、第二充电电池和偏航状态控制电子显示屏相连接;第二电源转换电路模块同时与第二充电电池、偏航状态控制电子显示屏、第二控制电路模块、可活动万向节和第二电源补给接入模块相连接;驱动电路模块同时与第二充电电池、步进电机相连接;第二控制电路模块同时与偏航状态控制电子显示屏相连接。
10.将等比例飞机机体模型上从机头沿机身到机尾设为基准方位线;三根支撑支柱沿上述基准方位线等间距分布,其中第一支撑支柱对应等比例飞机机体模型的机头位置,第二支撑支柱对应等比例飞机机体模型的机尾位置。
11.所述四根可活动万向节由前侧位可活动万向节、后侧位可活动万向节和两个翼侧位可活动万向节构成;其中前侧位可活动万向节、后侧位可活动万向节沿基准方位线设置,且前侧位可活动万向节对应等比例飞机机体模型的机头位置,后侧位可活动万向节对应等比例飞机机体模型的机尾位置,两个翼侧位可活动万向节对应等比例飞机机体模型的两侧机翼位置,并且两个翼侧位可活动万向节间的连线与前侧位可活动万向节和后侧位可活动万向节间的连线呈正交状态。
12.所述角度传感器安装在前侧位可活动万向节的下端后侧,用于测量并反馈等比例飞机机体模型的机头水平位置角与设定参考角的差值,即三自由度模拟偏航工作台的水平转动偏转角;速度传感器安装在后侧位可活动万向节的下端前侧,用于监测并反馈步进电
机的转动角速度,即三自由度模拟偏航工作台的转动速度;陀螺地平仪安装于第一支撑支柱的下端后侧,用于测量等比例飞机机体模型的俯仰角和倾斜角。
13.所述可活动万向节包括可控电动伸缩轴和连接在可控电动伸缩轴上端的球形连接轴头。
14.本发明提供的飞机备用罗盘校验教学平台具有如下有益效果:
15.可使学生及相关研究人员更好地理解飞机备用罗盘使用及其校验的工作原理和操作过程,可实现完全模拟飞机备用罗盘的测量和校验过程,其中:飞机机体模型按真实飞机等比例复刻;飞机备用罗盘采用电子装置模拟,解决了多用易损和不易操作的缺点;能够通过控制模拟平台进行多自由度模拟偏航,使用者能够更加直观地了解航空磁测。由于本发明实施例的仿真性与便携性,能够很好地被应用于教学实验当中,学生及相关研究人员对飞机备用罗盘的运作与校验了解地更加深入透彻并能够构建更完整的航空磁测相关理论体系,具有较高的教学研究性和理论引导价值。
附图说明
16.图1为本发明提供的飞机备用罗盘校验教学平台结构立体图。
17.图2(a)为本发明提供的飞机备用罗盘校验教学平台中飞机备用罗盘结构立体图。
18.图2(b)为本发明提供的飞机备用罗盘校验教学平台中飞机备用罗盘俯视图。
19.图2(c)为本发明提供的飞机备用罗盘校验教学平台中飞机备用罗盘内部构造图。
20.图3(a)为本发明提供的飞机备用罗盘校验教学平台中三自由度模拟偏航载体平台结构立体图。
21.图3(b)为本发明提供的飞机备用罗盘校验教学平台中第二壳体主视图。
22.图3(c)为本发明提供的飞机备用罗盘校验教学平台中三自由度模拟偏航载体平台内部构造图。
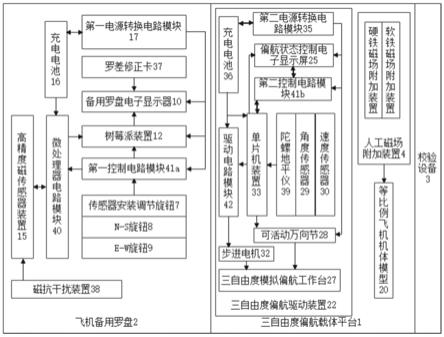
23.图4为本发明提供的飞机备用罗盘校验教学平台构成框图。
具体实施方式
24.下面结合本发明实施例中的附图,对本发明提供的飞机备用罗盘校验教学平台进行清楚、完整地描述。
25.如图1、图3、图4所示,本发明提供的飞机备用罗盘校验教学平台包括三自由度模拟偏航载体平台1、飞机备用罗盘2和校验设备3;其中,三自由度模拟偏航载体平台1包括三自由度偏航驱动装置22和等比例飞机机体模型20;等比例飞机机体模型20固定在三自由度偏航驱动装置22的顶部,上端设有飞机备用罗盘放置槽18和校验设备放置槽19,分别用于设置飞机备用罗盘2和校验设备3,并且飞机备用罗盘2和校验设备3位于同一高度。
26.所述等比例飞机机体模型20上还安装有人工附加磁场装置4;人工附加磁场装置4包括软铁磁场装置和硬铁磁场装置,用于产生人工附加的外部磁场干扰。
27.所述校验设备3为飞机磁测校验相关方面仪器,能够根据指定磁北参考方向与实时磁测方位信息进行处理得出罗差信息,用于飞机备用罗盘2的罗差校正。
28.所述飞机备用罗盘2在三自由度模拟偏航载体平台1的不同偏航状态、人工附加磁场装置4变换等外界环境条件下,测量并显示受影响的磁场数据信息,使用者根据校验设备
3得出相应罗差信息,由此分别调节飞机备用罗盘2上的传感器安装调节旋钮7、n-s旋钮8、e-w旋钮9以消除各项罗差,来达到校准设备的目的。
29.如图2、图4所示,所述飞机备用罗盘2包括第一壳体、备用罗盘电子显示器10、传感器安装调节旋钮7、n-s旋钮8、e-w旋钮9以及设置在第一壳体内部的第一充电电池16、罗差修正卡37、高精度磁传感器装置15、磁抗干扰装置38、树莓派装置12、第一印刷电路板13、水平隔板14a、垂直隔板14b、第一电源开关组件5、第一电源补给接入模块6和第一电源转换电路模块17;其中:第一壳体为由前面板、后面板、两个侧面板、上面板和下面板构成的长方形箱体结构;其中一个侧面板的外部设有第一电源开关组件5和第一电源补给接入模块6,分别用于飞机备用罗盘2的启停和充电;上面板上安装有备用罗盘电子显示屏16,用来反馈当前环境下高精度磁传感器装置15校准前后的测量数据信息;传感器安装调节旋钮7、n-s旋钮8和e-w旋钮9也安装在上面板上;下面板的顶面中部设有垂直隔板14b;高精度磁传感器装置15和磁抗干扰装置38安装在垂直隔板14b的一侧,第一充电电池16和第一电源转换电路模块17安装在垂直隔板14b的另一侧;树莓派装置12、第一印刷电路板13、罗差修正卡37和水平隔板14a从上至下利用电路板支柱11间隔设置在垂直隔板14b的上侧;第一印刷电路板13上安装有微处理器模块40和第一控制电路模块41a;其中:微处理器电路模块40分别与高精度传感器装置21、第一控制电路模块41a、第一充电电池16、树莓派装置12相连接;第一控制电路模块41a同时与传感器安装调节旋钮7、n-s旋钮8、e-w旋钮9、备用罗盘电子显示器10、树莓派装置12和第一电源转换电路模块17相连接;第一电源转换电路模块17同时与第一充电电池16、备用罗盘电子显示器10、树莓派装置12和第一电源补给接入模块6相连接,高精度磁传感器装置15与磁抗干扰装置38相连接;罗差修正卡37与备用罗盘电子显示器10相连接。
30.所述水平隔板14a、垂直隔板14b均采用无磁材料制成,与磁抗干扰装置38一起用于高精度磁传感器装置15与第一印刷电路板13、树莓派装置12、充电电池22之间的电磁隔离,将飞机备用罗盘2内部的磁场影响控制到最小。
31.所述高精度磁传感器装置15在飞机备用罗盘2中主要起测量和采集磁场方位信息的作用;罗差修正卡37起消除象限罗差的作用;n-s旋钮8和e-w旋钮9起消除半圆罗差的作用;传感器安装调节旋钮7起消除圆周罗差的作用。
32.所述第一电源转换电路模块17有两种工作模式:
33.充电模式:其与第一电源补给接入模块6、第一充电电池16相连接,能够在第一电源补给接入模块6接入有效电能时配合第一充电电池16完成充电过程,并能起到监测保护第一充电电池16的效果,在监测到电池电源补给完成时自动断电;
34.用电模式:其与备用罗盘电子显示器10、树莓派装置12、第一控制电路模块41a和第一充电电池16相连接,将第一充电电池16所提供的直流电源转换为其他电路模块、装置所需的工作电源;第一控制电路模块41a根据监测传感器安装调节旋钮7、n-s旋钮8、e-w旋钮9的不同状态向微处理器电路模块40输出控制信息,微处理器电路模块40根据高精度磁传感器装置15测量和采集到的磁场数据信息与控制信息相整合后向树莓派装置12发送数据,树莓派装置12进行最后的信号分析与处理,并将处理后的数据输出给备用罗盘电子显示器10进行显示。
35.如图3、图4所示,所述三自由度偏航驱动装置22包括第二壳体、三自由度模拟偏航
工作台27、偏航状态控制电子显示屏25、偏航控制按键26以及设置在第二壳体内部的可活动万向节28、步进电机32、第二印刷电路板34、速度传感器30、角度传感器29、第二电源转换电路模块35、第二充电电池36、陀螺地平仪39、中继圆台31、第二电源开关组件34和第二电源补给接入模块24;其中:第二壳体为由前面板、后面板、两个侧面板、上面板和下面板构成的长方形箱体结构;前面板上安装有偏航状态控制电子显示屏25以及多个偏航控制按键26,用来显示和控制当前等比例飞机机体模型20的偏航状态;上面板中部形成有一圆形开口;其中一个侧面板的外部设有第二电源开关组件34和第二电源补给接入模块24;步进电机32的下端固定在下面板的顶面中部,输出轴朝上且与中继圆台31的底面中部相连接;四根可活动万向节28的下端间隔安装在中继圆台31的顶面上,上部从上面板上的圆形开口向上伸出;三自由度模拟偏航工作台27的底面同时连接在四根可活动万向节28的上端;等比例飞机机体模型20的底面利用三根支撑支柱21固定在三自由度模拟偏航工作台27的顶面上;角度传感器29、速度传感器30和陀螺地平仪39安装在中继圆台31的顶面上;步进电机32的外侧安装有第二印刷电路板34、单片机装置33、第二电源转换电路模块35和第二充电电池36;第二印刷电路板34上设有第二控制电路模块41b和驱动电路模块42;单片机装置33分别与第二控制电路模块41b、驱动电路模块42、角度传感器29、速度传感器30、陀螺地平仪39、可活动万向节28、第二充电电池36和偏航状态控制电子显示屏25相连接;第二电源转换电路模块35同时与第二充电电池36、偏航状态控制电子显示屏25、第二控制电路模块41b、可活动万向节28和第二电源补给接入模块24相连接;驱动电路模块42同时与第二充电电池36、步进电机32相连接;第二控制电路模块41b同时与偏航状态控制电子显示屏25相连接。
36.将等比例飞机机体模型20上从机头沿机身到机尾设为基准方位线;三根支撑支柱21沿上述基准方位线等间距分布,其中第一支撑支柱21a对应等比例飞机机体模型20的机头位置,第二支撑支柱21b对应等比例飞机机体模型20的机尾位置。
37.所述四根可活动万向节28由前侧位可活动万向节28a、后侧位可活动万向节28b和两个翼侧位可活动万向节28c构成;其中前侧位可活动万向节28a、后侧位可活动万向节28b沿基准方位线设置,且前侧位可活动万向节28a对应等比例飞机机体模型20的机头位置,后侧位可活动万向节28b对应等比例飞机机体模型20的机尾位置,两个翼侧位可活动万向节28c对应等比例飞机机体模型20的两侧机翼位置,并且两个翼侧位可活动万向节28c间的连线与前侧位可活动万向节28a和后侧位可活动万向节28b间的连线呈正交状态。
38.所述角度传感器29安装在前侧位可活动万向节28a的下端后侧,用于测量并反馈等比例飞机机体模型20的机头水平位置角与设定参考角的差值,即三自由度模拟偏航工作台27的水平转动偏转角;速度传感器30安装在后侧位可活动万向节28b的下端前侧,用于监测并反馈步进电机32的转动角速度,即三自由度模拟偏航工作台27的转动速度;陀螺地平仪39安装于第一支撑支柱21a的下端后侧,用于测量等比例飞机机体模型20的俯仰角和倾斜角。
39.所述可活动万向节28包括可控电动伸缩轴43和连接在可控电动伸缩轴43上端的球形连接轴头44,通过接收单片机装置33发出的控制指令,可控电动伸缩轴43可进行伸缩变换,由此达到控制三自由度模拟偏航工作台27俯仰和倾斜的效果。
40.所述第二电源转换电路模块35有两种工作模式:
41.充电模式:其与第二电源补给接入模块24、第二充电电池36相连接,能够在第二电
源补给接入模块24接入有效电能时配合第二充电电池36完成充电过程,并能起到监测保护第二充电电池36的效果,在监测到电池电源补给完成时自动断电;
42.用电模式:其与第二电源转换电路模块35、第二充电电池36、偏航状态控制电子显示屏25、第二控制电路模块41b和可活动万向节28相连接,将第二充电电池36所提供的直流电源转换为其他电路模块、装置所需的工作电源;第二控制电路模块41b根据偏航控制按键26的状态向单片机装置33输出控制信号,单片机装置33将处理过后的控制信号传送给驱动电路模块42和可活动万向节28来分别控制步进电机32转动、可活动万向节28伸缩变换,由此达到模拟偏航状态的效果。
43.现将本发明提供的飞机备用罗盘校验教学平台的工作原理阐述如下:
44.在进行实际航空磁测时,飞机上的磁干扰情况将随着环境、飞行方向和飞机的姿态的变换而变化,这将影响航空方面的磁测,尤其对高精度的航空磁测影响更加严重,因此磁测相关装置的罗差修正不可避免。本发明提供的飞机备用罗盘校验教学平台可利用人工附加磁场装置4来产生干扰磁场,通过控制三自由度模拟偏航载体平台1的变化来达到模拟飞机机体偏航的效果,模拟了飞机在不同情况下的磁航向的测量与校正;在人工附加磁场区域中,等比例飞机机体模型20进行偏向、俯仰、倾斜的偏航状态相关变化;使用者通过观测相关传感器反馈的磁场数据信息来了解飞机的磁干扰状况,并根据校验设备3得出的相关参数来调节飞机备用罗盘2上的相关旋钮,从而消除飞机备用罗盘2的罗差,达到调节和校准飞机备用罗盘2的目的,使飞机备用罗盘2能够正确地测量出飞机的正确磁航向。
45.下面对本发明实施例中相关装置的具体工作过程进行阐述:
46.本发明提供的飞机备用罗盘校验教学平台上的各装置在接入有效电能后,进入待机状态,人工附加磁场装置4产生干扰磁场来模拟磁干扰下的航空磁测环境。
47.进入工作状态后,在飞机备用罗盘2中,由高精度磁传感器装置15测量并传送磁场数据信号给微处理器电路模块40进行处理,处理后信号传递给树莓派装置12并通过备用罗盘电子显示器10将磁场数据信息进行显示,使用者可根据显示内容了解当前所测磁场信息。
48.在三自由度模拟偏航载体平台1中,由陀螺地平仪39反馈当前等比例飞机机体模型20的前后俯仰角与左右倾斜角信息、由角度传感器29反馈当前等比例飞机机体模型20偏离参考方向的水平偏移角信息、由速度传感器30反馈当前等比例飞机机体模型20进行水平旋转偏航时的速度信息,所得数据信息皆传输给单片机装置33进行处理,单片机装置33将处理后数据在偏航状态控制电子显示屏25上显示、作为等比例飞机机体模型20的实时偏航控制信息,使用者根据需求控制三自由度偏航载体平台1变化来模拟飞机偏航情况,其中:通过触发各类偏航控制按键,由第二控制电路模块42b向单片机装置33传递相应电信号,单片机装置33进行处理并分析、并向可活动万向节28和驱动电路模块42输出相应指令信号,驱动电路模块42通过控制步进电机32工作来控制三自由度模拟偏航工作台27的水平偏离角度和旋转速度。可活动万向节28中的可控电动伸缩轴43根据接收的电脉冲指令进行相应升降变换,从而达到控制三自由度模拟偏航工作台27的俯仰、倾斜变化。所有数据变化均通过陀螺地平仪39、角度传感器29、速度传感器30反馈并由单片机装置33处理并实时显示,据此,能够达到模拟机体偏航的目的。
49.在模拟偏航过程中,使用者通过备用罗盘装置电子显示器10中的所测磁场信息变
化了解当前磁干扰情况。同时根据校验设备3得出相应的罗差信息,其中,调节n-s旋钮8与e-w旋钮9、传感器安装调节旋钮7来改变第一控制电路模块41a传递到树莓派装置12的相关电信号,树莓派装置12将此反馈增量信号与原磁传感器测量数据相结合、并通过一定的信号分析处理后消除了半圆罗差以及圆周罗差,罗差修正卡37消除了象限罗差,树莓派装置12将处理后数据信息在备用罗盘电子显示器10上进行显示,此时显示的数据信息即为校准后的磁场数据信息。
50.本发明提供的飞机备用罗盘校验教学平台的工作流程如下:
51.a.将飞机备用罗盘1上的第一电源开关组件5和三自由度模拟偏航驱动装置2上的第二电源开关组件34打开;
52.b.使用者在三自由度偏航载体平台1中根据需要通过偏航控制按键26控制等比例飞机机体模型20进行偏向、俯仰、倾斜的偏航动作,观测此时飞机备用罗盘2测量反馈的磁场数据信息,接着继续控制不同偏航状态并记录磁测信息,以此类推测量多组数据,从而了解当前的飞机磁干扰状况;
53.c.根据校验设备3得出相应的罗差信息,使用者据此分别调节飞机备用罗盘2中的传感器安装调节旋钮7、n-s旋钮8、e-w旋钮9来消除各项罗差;
54.d.使用者观测此时的飞机备用罗盘2的磁场测量信息得出正确的飞机磁航向。