1.本发明涉及飞行器,更具体地说涉及一种串列翼装置及串列翼飞行器。
背景技术:
2.现有的串列翼多是两个翼一前一后串列,公布号为cn 111152926 a的中国发明专利公开了一种串列翼飞行器,这种飞行器翼几何中心运动的轨迹在铅垂面上,不加翼隔板时不能垂直起降、悬停;加上翼隔板后才能垂直起降、悬停,但是翼隔板不仅增加了重量,而且还会减小产生升力的那一层翼产生的升力,升力小,只有一层翼产生升力、升力进一步小;以低于转动速度较多的速度飞行时也只有一层翼产生升力,升力小;翼运行到圆弧段时迎角不断变化,不仅会产生较大的转动阻力还会产生较大的前飞阻力;翼运行到圆弧段时会产生较大的离心力,这离心力一般大于升力很多倍,导致对翼的强度要求高,增加了翼的重量;人们一直致力于解决上述问题而不得。
技术实现要素:
3.针对上述技术问题,本发明提出一种新型串列翼装置和串列翼飞行器。
4.为实现上述技术目的,本发明采用的技术方案是:一种串列翼装置,包括:环形运动装置、以及设置在所述环形运动装置上的若干翼;所述环形运动装置能够环形循环运动;若干翼能够随所述环形运动装置循环运动,以使翼获得升力或同时获得升力和推力。
5.所述环形运动装置包括:环形运动单元、以及至少两个转轮;所述环形运动单元绕在所述转轮上形成环形运动结构;所述环形运动单元上固定设有若干个用于连接所述翼的翼连接件;本发明的区别是带轮轴垂直于水平面或与水平成大于45度的夹角,翼几何中心的运行轨迹在水平面上或与水平面成小于45度角的平面上。翼的这种布置方式使得翼不分上下层,在垂直起降、悬停、低于转动速度较多的低速飞行时,所有翼都能产生升力,升力大;翼运行到圆弧段时翼迎角不变或变化小,不会产生较大的转动阻力和前飞阻力;翼运行到圆弧段时离心力方向和翼的展长方向一致,对翼的强度要求没有增加,翼重量轻。各个翼垂直方向上的高度可以不同,可以有的翼布置的高一些,有的翼布置的低一些,以减小翼间干扰,这样各个翼几何中心的运动轨迹会处于不同的平面上。
6.巡航飞行时设置翼的前飞速度、风速和翼转动速度的合适关系,使串列翼获得较大的空气动力学效率和减小转动速度以减小转动引起的振动。
7.翼连接件上设置有轴,轴上有螺纹,轴上套有压缩弹簧,翼上有和所述轴上螺纹相配的内螺纹孔;翼可绕轴转动;翼从直线段运行到圆弧段时或者从圆弧段运行到直线段时,翼的速度会发生突变,翼转动以减小突变量,同时压缩弹簧以储存能量,缓冲振动。
8.本发明翼连接件上伸出连接板,连接板上的轮子叫做离心轮,离心轮接触的轨道叫做离心轮轨道。
9.所述串列翼装置上设置有与所述环形运动单元运动方向相平行设置的离心轮轨道,所述翼连接件一面与所述环形运动单元固定,另一面与翼连接;所述环形运动单元为环形带或环形链或环形绳;翼连接件上设置有一个连接板,所述连接板上设有与离心轮轨道滚动接触的离心轮,离心轮将翼连接件、翼、自身的离心力施加到离心轮轨道上,使这些离心力不作用到带上,减小带振动和避免过大的离心力使带脱离带轮。
10.翼连接件上设置有连接耳,所述连接耳上设有支撑轮,支撑轮和支撑轨道接触,将翼的升力作用在支撑轨道上。
11.翼运行轨迹有直线段、有圆弧段,直线段翼的两端设有用于限制翼尖绕流,减弱下洗流以获得较大升阻比的翼端挡板。
12.所述环形运动装置为环形直线电机装置,环形的轨道作为定子,围绕环形轨道设置多个转子,每个转子上都连接翼,翼随转子一起循环运动。
13.本发明公开了一种新型串列翼飞行器,包括前方并排设置的两个串列翼,以及后方设置的一个小串列翼装置或旋翼装置。
14.本发明进一步公开了一种新型串列翼飞行器,多个串列翼装置组合在一起构成飞行器,比如四串列翼飞行器、六串列翼飞行器;采用多旋翼平衡力、转矩的方法以及飞行、偏航等操控的方法;和/或安装螺旋桨推进器来提供多串列翼飞行器部分或全部的飞行推进力。
附图说明
15.图1所示是本发明串列翼装置的第一种实施例的结构示意图;图2所示是本发明第三种实施例串列翼装置结构示意图;图3所示是本发明第三种实施例翼连接件的结构示意图;图4示是本发明第四种实施例的串列翼装置倒置的结构示意图;图5所示是本发明第五种实施例的串列翼装置倒置的结构示意图;图6所示是本发明第六种实施例的串列翼装置倒置的结构示意图;图7所示是本发明一种飞行器的结构示意图。
具体实施方式
16.下面结合说明书附图以及具体实施例对本发明串列翼装置及串列翼飞行器的技术方案作进一步详细说明。
17.实施例1如图1所示是本发明串列翼装置的第一种实施例的结构示意图。
18.包括串列翼装置架1、带2、带轮3、翼连接件4、翼5、驱动装置。驱动装置驱动带轮3转动时带动带2转动,翼连接件4固定在带2上,翼5固定在翼固定件4上和带2一起循环运动,翼以一定的正迎角环形运动的过程中所有翼都产生升力。
19.实施例2
本发明的第二种实施例,设置翼巡航时的前飞速度、翼运动速度和空气流速的关系,使串列翼获得较大的空气动力学效率。前飞速度和空气流速的合速度的方向和翼运动轨迹直线段转动速度方向的夹角比较小或成一条直线,前飞速度和空气流速的合速度大小和转动速度大小相差不大。这样的设置可使翼运行在一侧直线段区域时翼相对于空气的速度为前飞速度和空气流速的合速度加上翼转动的速度,从而获得一个较大速度,升力和速度的平方成正比,可以产生较大的升力;翼运行在另一侧直线段区域时相对于空气的速度为前飞速度和空气流速的合速度减去翼转动的线速度,会获得一个较小速度,所受的阻力小,升力或负升力也小;而且此时翼的转动速度小于垂直起降时的转动速度,可以减小串列翼装置转动件的振动。
20.实施例3如图2所示是本发明第三种实施例串列翼结构示意图,如图3所示是本发明第三种实施例翼连接件的结构示意图。
21.与实施例1不同的翼连接件4上设置有轴,轴上有螺纹,轴上套有上弹簧6和下弹簧7 ,翼5上有和所述轴上螺纹相配的内螺纹孔;翼5可绕轴转动。带2顺时针转动,翼5随带2从直线段轨迹运动到圆弧段轨迹的过程中,翼5会绕翼连接件4上的轴逆时针旋转,旋转压缩下弹簧7储存能量,在这一过程带的外侧翼部分的速度有些增大,同时翼发生转动使圆弧段带的外侧翼部分所需增加的速度值减小,与此同时带的内侧翼部分所需减小的速度值减小,以减小冲击力,通过下弹簧7的压缩量控制翼逆时针转动的角度。翼从圆弧段运行到直线段过渡时,翼会顺时针转动一个角度缓冲速度的突变,以减小冲击力;同理通过上弹簧6的压缩量控制翼顺时针转动的角度。
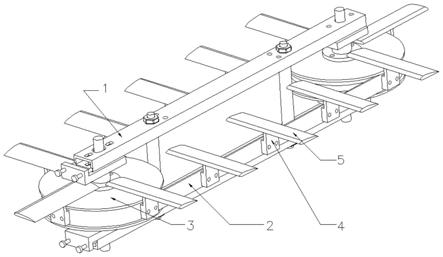
22.实施例4如图4示是本发明第四种实施例的串列翼倒置示意图。
23.与第三种实施例不同的是翼连接件4上伸出一连接板8,连接板8上设有一个与离心轮轨道9滚动接触的离心轮10,离心轮10将翼、翼连接件4和自身的离心力施加到离心轮轨道9上,使这些离心力不作用到带上,减小带振动和避免过大的离心力使带脱离带轮。
24.实施例5如图5所示是本发明第五种实施例的串列翼倒置的示意图与第四种实施例不同的是翼连接件上伸出连接耳11,所述连接耳11上设有支撑轮12,支撑轮12和支撑轨道13接触,将翼的升力作用在支撑轨道13上,避免带上承受过大的升力。
25.实施例6如图6所示是本发明第六种实施例的串列翼倒置的示意图。
26.翼运行轨迹有直线段、有圆弧段,直线段翼的两端设有用于限制翼尖绕流,减弱下洗流以获得较大升阻比的翼端挡板14。
27.如图7所示是本发明一种飞行器的结构示意图。
28.本发明串列翼飞行器左右两边各一个串列翼装置,左边串列翼顺时针转动产生升力,右边串列翼逆时针转动产生升力。图示上方为前飞方向,前飞时,左边串列翼翼运行到左侧时翼所受升力大,运行到右侧时所受升力小,右边串列翼翼运行到左侧时翼升力小,运行到右侧时升力大,控制左右串列翼的转速,使飞行器横向平衡。飞行器后侧是一个小串列翼,小串列翼提供飞行器纵向的平衡,飞行器仰头时,小飞行器转速增加,前面两个串列翼
转速减小,飞行器后方受力增大,前方受力减小,仰头被抑制;飞行器低头时同理。此飞行器静止在地面时,三个串列翼装置翼同时循环转动加速,产生的升力逐渐加大至略大于重力时缓慢升空;前方两个串列翼转动速度减慢,后方小串列翼装置转动速度加快使飞行器发生前倾,升力的分量作为推进力,使飞行器前飞;降落时同时降低三个串列翼的转速使飞行器缓慢落下;后方的小串列翼也可以是旋翼。本发明的飞行器可用多个串列翼装置组合在一起,比如四串列翼、六串列翼,采用多旋翼平衡力、转矩的方法以及前飞、偏航等操控的方法;本发明还可以选择的安装螺旋桨推进器来提供多串列翼飞行器部分或全部的飞行推进力。
29.作为本发明的其他实施例,本发明的串列翼装置不限于带装置;可以是链条、链轮装置,翼连接在链条上,随链条一起作环形运动;也可以是钢丝绳,钢丝绳轮装置,翼连接在钢丝绳上,随钢丝绳一起作环形运动;也可以是环形直线电机装置(直线电机弯曲成环形),环形的轨道作为定子,围绕环形轨道设置多个转子,每个转子上都连接上翼,翼随转子一起作环形运动。
30.本发明的稳定性可以参考现有飞行器的稳定性进行设置,比如翼设置反角,加平尾、垂尾等。本发明的转向还可以参考现有固定翼飞行器的转向舵装置。
31.以上结合最佳实施例对本发明进行了描述,但本发明并不局限于以上揭示的实施例,而应当涵盖各种根据本发明的本质进行的修改、等效组合。