1.本实用新型涉及核电站放射环境下检修设备领域,尤其涉及一种用于狭小通道在可变轨道上往复移动检修作业的底盘。
背景技术:
2.在进行密闭空间内的检修作业时,密闭空间与外界仅有一狭小通道,人员无法进入,需要对其中的设备的进行打磨、焊接、抛光和焊缝检测等多道工序的检修作业,而现有可进入的移动机器人承载性能不足,无法携带不同工具多次稳定往复通过狭小通道进出该密闭环境。密闭环境内不同位置的设备均需要检修作业,在检修作业完成后,需要检修设备全部撤出密闭环境,而现有的轨道装置均为定轨铺设,轨道上的移动装置无法跨越弯折的轨道节点,仅能跟随轨道进行大半径的圆弧转弯,且在作业完成后,轨道无法退出该密闭环境。基于上述情况,要解决仅有狭小通道的密闭环境内众多设备的检修作业,需要一种承载能力大、可携带多种作业工具、可穿越弯折轨道的轨道移动底盘。
技术实现要素:
3.为了克服现有技术的缺陷,本实用新型所要解决的技术问题在于提出一种用于核电站大型容体内设备检修的可变轨道及检修机器人,其结构新颖,能够避免环境内的障碍物与地面凹凸不平等因素的影响,实现变轨运动来提高装备作业范围,且对不同地点的不同任务进行稳定作业,作业完成后稳定回收,检修机器人运动平稳,负载能力强,增强机器人的适应性和可靠性,降低作业装备由于环境因素无法工作的风险,保障操作人员的安全,明显提升针对该特殊工况环境下作业效率。
4.为达此目的,本实用新型采用以下的技术方案是提供了一种用于狭小通道在可变轨道上往复移动检修作业的底盘,包括底盘车架和协作机械臂,其特征在于:底盘车架设于所述可变轨道上,所述底盘车架上方设有协作机械臂,所述协作机械臂底部含有四个固定螺栓,所述车架底部前后各设有一个转向车架,所述转向车架上端设有圆螺母固定,前方的转向车架下方设有从动轮,所述后方的转向车架设有驱动轮,所述转向车架的两侧各设有一个自适应侧壁固定装置;所述自适应侧壁固定装置包括设于所述转向车架侧面的侧壁支架,所述侧壁支架下端设有导轮支架,所述导轮支架支承导轮,所述侧壁支架与导轮支架之间设有矩形压簧,所述侧壁支架设有导槽和导向孔,所述导轮支架设有导杆和弹簧支杆。
5.进一步地,所述可变轨道包括第一关节臂、第二关节臂、关节电机,其中,所述第一关节臂和第二关节臂之间的设置有关节电机;所述第二关节臂和第三关节臂之间设置有关节电机,在关节电机的驱动下,所述第二关节臂相对于所述第一关节臂转动,所述第三关节臂相对于所述第二关节臂转动。
6.进一步地,底盘车架携带协作机械臂,所述驱动轮、从动轮在可变轨道上表面滚动,所述自适应侧壁固定装置的导轮夹紧可变轨道侧面,检修机器人直线前进,转向车架受平衡夹紧力保持前进方向,检修机器人转向,转向车架相对底盘车架转动,自适应侧壁固定
装置的矩形压簧压缩,两侧导轮中心距增大,进行转向。
7.进一步地,所述检修机器人的上方的协作机械臂初始处于折叠状态,协作机械臂随底盘车架运动至可变轨道末端,底盘车架固定后开始作业,作业完成后折叠收回;
8.所述协作机械臂作业完成后折叠,所述检修机器人沿可变轨道回到第一关节臂,所述可变轨道恢复直线并收回本。
9.实用新型的有益效果为:该轨道移动底盘在可变轨道上,进入密闭环境内进行设备检修作业,可以往复通过仅有的狭小通道更换多种不同的作业工具,负载能力强,仅轨道移动底盘往复运动,避免了长臂反复伸缩的不可靠和低效率的缺点。
附图说明
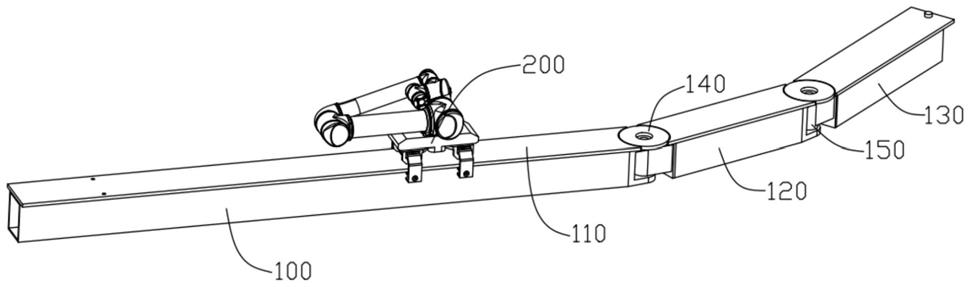
10.图1是本发明具体实施方式提供的用于狭小通道在可变轨道上往复移动检修作业的底盘的第一视角整机结构示意图;
11.图2是本发明具体实施方式提供的轨道移动底盘的结构示意图;
12.图3是本发明具体实施方式提供的自适应侧壁固定装置的正视结构示意图;
13.图4是本发明具体实施方式提供的自适应侧壁固定装置的第一视角结构示意图;
14.图5是本发明具体实施方式提供的自适应侧壁固定装置的第二视角结构示意图。
15.图中:100
‑
可变轨道;110
‑
第一关节臂;120
‑
第二关节臂;130
‑
第三关节臂;140
‑
盖板;150
‑
关节电机200
‑
检修机器人;210
‑
底盘车架;220
‑
协作机械臂;230
‑
圆螺母;240
‑
螺栓;250
‑
转向车架;260
‑
从动轮;270
‑
驱动轮;280
‑
自适应侧壁固定装置;281
‑
侧壁支架;282
‑
导轮支架;283
‑
导轮;284
‑
矩形压簧;285
‑
导槽;286
‑
导杆;287
‑
导向孔;288
‑
弹簧支杆。
具体实施方式
16.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
17.如图1所示,该实施例中公开了一种用于狭小通道在可变轨道上往复移动检修作业的底盘,包括可变轨道100及轨道移动底盘200,所述可变轨道100包括第一节关臂110、第二关节臂120、第三关节臂130及设于所述第一节关臂110与第二关节臂120之间、第二关节臂120与第三关节臂130之间的盖板140和关节电机150,所述可变轨道100进行变轨,设于所述第一节关臂110和第二关节臂120之间的关节电机150和设于设于所述第二关节臂120和第三关节臂130之间的关节电机150进行通电,所述第二关节臂120相对于所述第一节关臂110转动,所述第三关节臂130相对于所述第二关节臂120转动,可变轨道100末端到达工作范围,所述两个关节电机150停止工作。
18.如图2所示,所述轨道机器人200包括设于所述可变轨道100上的底盘车架210,所述车架上方设有协作机械臂220,所述协作机械臂220底部含有四个固定螺栓240,所述车架底部前后各设有一个转向车架250,所述转向车架250上端设有圆螺母230固定,所述前方的转向车架250下方设有从动轮260,所述后方发转向车架250设有驱动轮270,所述两个转向车架250的两侧各设有一个自适应侧壁固定装置280。
19.如图3、4、5所示,所述自适应侧壁固定装置280包括设于所述转向车架250侧面的侧壁支架281,所述侧壁支架281下端设有导轮283支架282,所述导轮283支架282支承导轮283,所述侧壁支架281与导轮283支架282之间设有矩形压簧284,所述侧壁支架281设有导
槽285和导向孔287,所述导轮283支架282设有导杆286和弹簧支杆288;所述自适应侧壁固定装置280的导轮283夹紧可变轨道100侧面,轨道机器人200直线前进,转向车架250受平衡夹紧力保持前进方向,轨道机器人200转向,转向车架250相对底盘车架210转动,自适应侧壁固定装置280的矩形压簧284压缩,两侧导轮283中心距增大,进行转向。
20.本实用新型是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本技术的权利要求内的实施例都属于本实用新型保护的范围。